 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic and Versatile Humanoid Walking via Embedding 3D Actuated SLIP Model with Hybrid LIP Based Stepping
Aug 06, 2020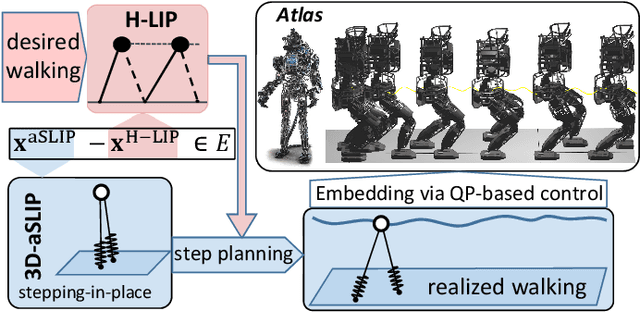
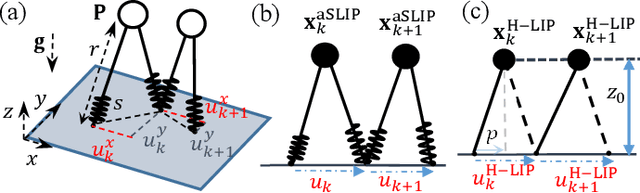
In this paper, we propose an efficient approach to generate dynamic and versatile humanoid walking with non-constant center of mass (COM) height. We exploit the benefits of using reduced order models (ROMs) and stepping control to generate dynamic and versatile walking motion. Specifically, we apply the stepping controller based on the Hybrid Linear Inverted Pendulum Model (H-LIP) to perturb a periodic walking motion of a 3D actuated Spring Loaded Inverted Pendulum (3D-aSLIP), which yields versatile walking behaviors of the 3D-aSLIP, including various 3D periodic walking, fixed location tracking, and global trajectory tracking. The 3D-aSLIP walking is then embedded on the fully-actuated humanoid via the task space control on the COM dynamics and ground reaction forces. The proposed approach is realized on the robot model of Atlas in simulation, wherein versatile dynamic motions are generated.
Sequential Motion Planning for Bipedal Somersault via Flywheel SLIP and Momentum Transmission with Task Space Control
Aug 06, 2020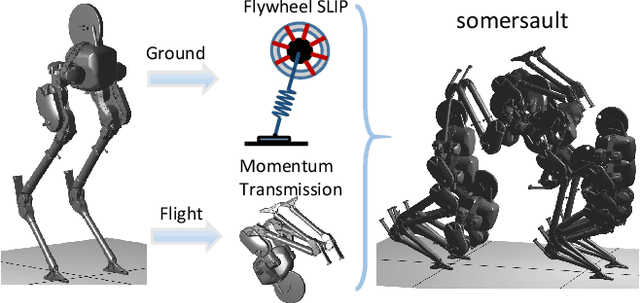
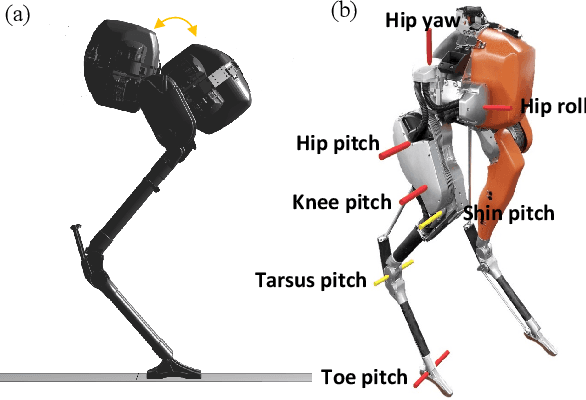
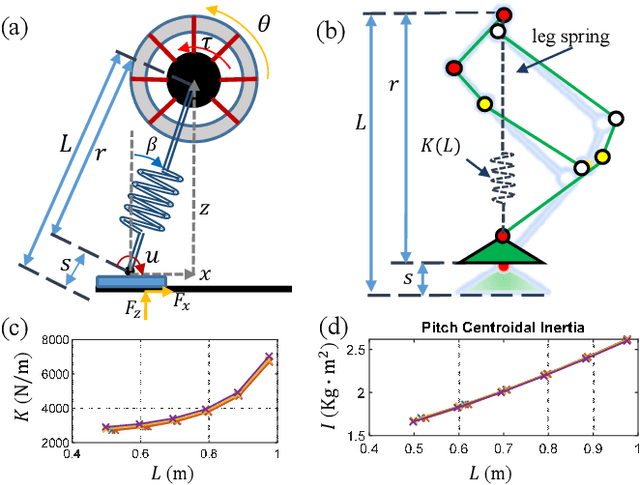
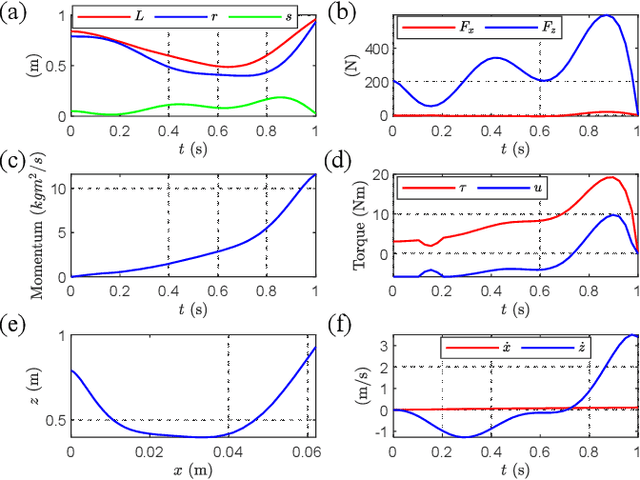
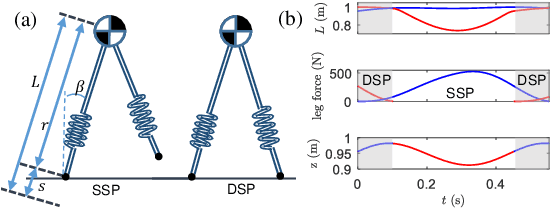
In this paper, we present a sequential motion planning and control method for generating somersaults on bipedal robots. The somersault (backflip or frontflip) is considered as a coupling between an axile hopping motion and a rotational motion about the center of mass of the robot; these are encoded by a hopping Spring-loaded Inverted Pendulum (SLIP) model and the rotation of a Flywheel, respectively. We thus present the Flywheel SLIP model for generating the desired motion on the ground phase. In the flight phase, we present a momentum transmission method to adjust the orientation of the lower body based on the conservation of the centroidal momentum. The generated motion plans are realized on the full-dimensional robot via momentum-included task space control. Finally, the proposed method is implemented on a modified version of the bipedal robot Cassie in simulation wherein multiple somersault motions are generated.
ABC-LMPC: Safe Sample-Based Learning MPC for Stochastic Nonlinear Dynamical Systems with Adjustable Boundary Conditions
Mar 03, 2020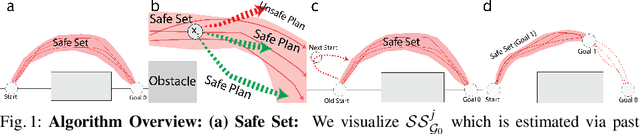

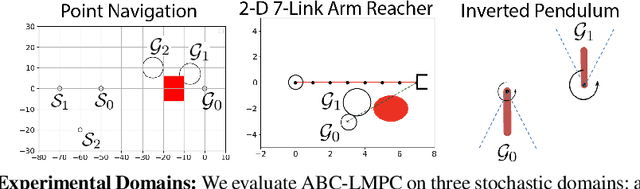
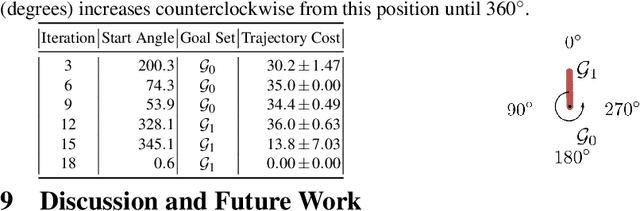
Sample-based learning model predictive control (LMPC) strategies have recently attracted attention due to their desirable theoretical properties and their good empirical performance on robotic tasks. However, prior analysis of LMPC controllers for stochastic systems has mainly focused on linear systems in the iterative learning control setting. We present a novel LMPC algorithm, Adjustable Boundary Condition LMPC (ABC-LMPC), which enables rapid adaptation to novel start and goal configurations and theoretically show that the resulting controller guarantees iterative improvement in expectation for stochastic nonlinear systems. We present results with a practical instantiation of this algorithm and experimentally demonstrate that the resulting controller adapts to a variety of initial and terminal conditions on 3 stochastic continuous control tasks.
Learning for Safety-Critical Control with Control Barrier Functions
Dec 20, 2019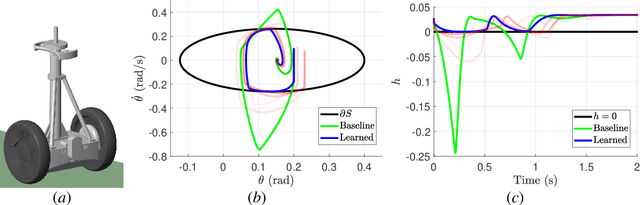
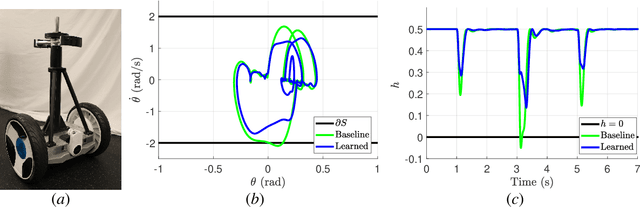
Modern nonlinear control theory seeks to endow systems with properties of stability and safety, and have been deployed successfully in multiple domains. Despite this success, model uncertainty remains a significant challenge in synthesizing safe controllers, leading to degradation in the properties provided by the controllers. This paper develops a machine learning framework utilizing Control Barrier Functions (CBFs) to reduce model uncertainty as it impact the safe behavior of a system. This approach iteratively collects data and updates a controller, ultimately achieving safe behavior. We validate this method in simulation and experimentally on a Segway platform.
Motion Decoupling and Composition via Reduced Order Model Optimization for Dynamic Humanoid Walking with CLF-QP based Active Force Control
Oct 01, 2019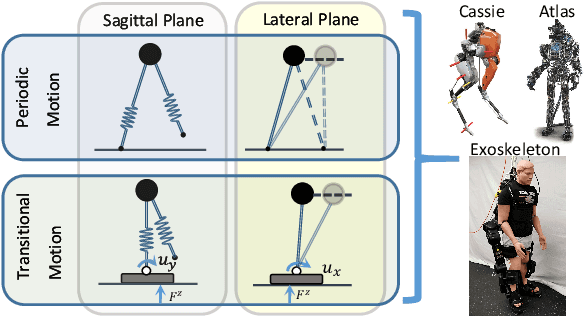
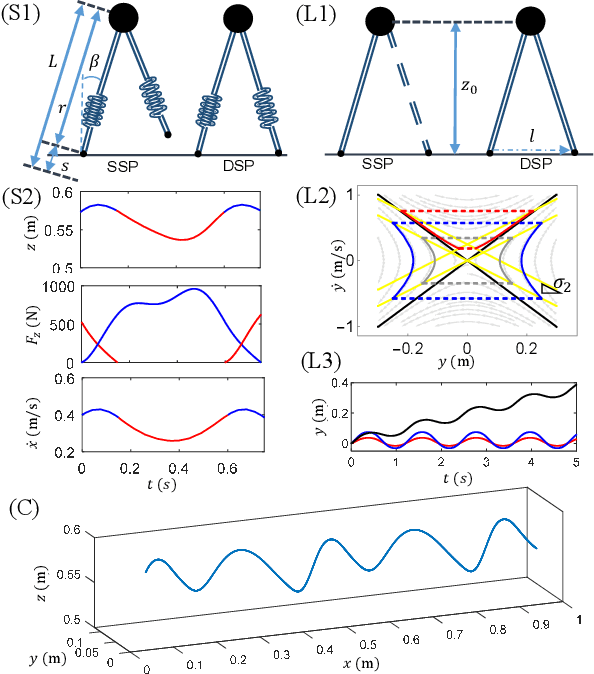
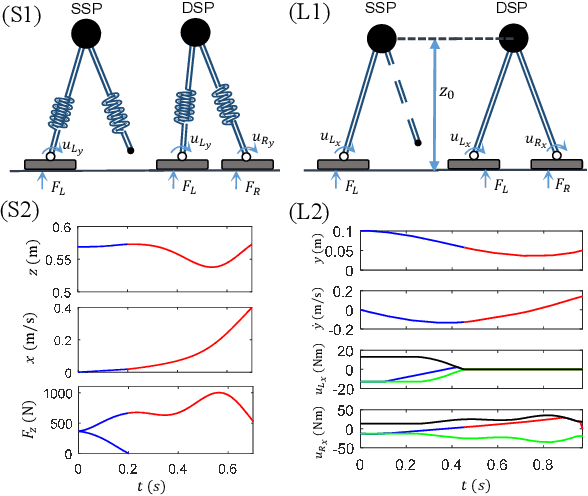
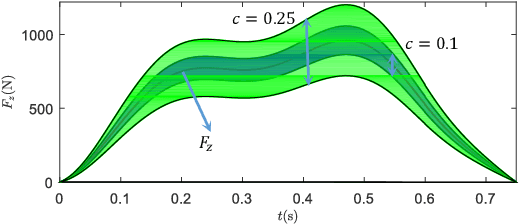
In this paper, 3D humanoid walking is decoupled into periodic and transitional motion, each of which is decoupled into planar walking in the sagittal and lateral plane. Reduced order models (ROMs), i.e. actuated Spring-loaded Inverted Pendulum (aSLIP) models and Hybrid-Linear Inverted Pendulum (H-LIP) models, are utilized for motion generation on the desired center of mass (COM) dynamics for each type of planar motion. The periodic motion is planned via point foot (underactuated) ROMs for dynamic motion with minimum ankle actuation, while the transitional motion is planned via foot-actuated ROMs for fast and smooth transition. Composition of the planar COM dynamics yields the desired COM dynamics in 3D, which is embedded on the humanoid via control Lyapunov function based Quadratic programs (CLF-QPs). Additionally, the ground reaction force profiles of the aSLIP walking are used as desired references for ground contact forces in the CLF-QPs for smooth domain transitions. The proposed framework is realized on a lower-limb exoskeleton in simulation wherein different walking motions are achieved.
Orbit Characterization, Stabilization and Composition on 3D Underactuated Bipedal Walking via Hybrid Passive Linear Inverted Pendulum Model
Oct 01, 2019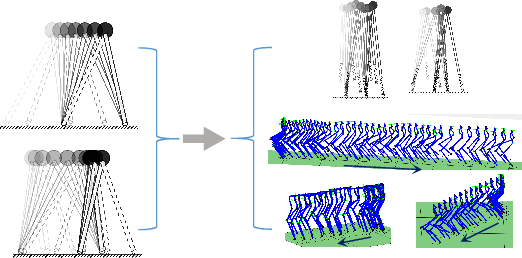
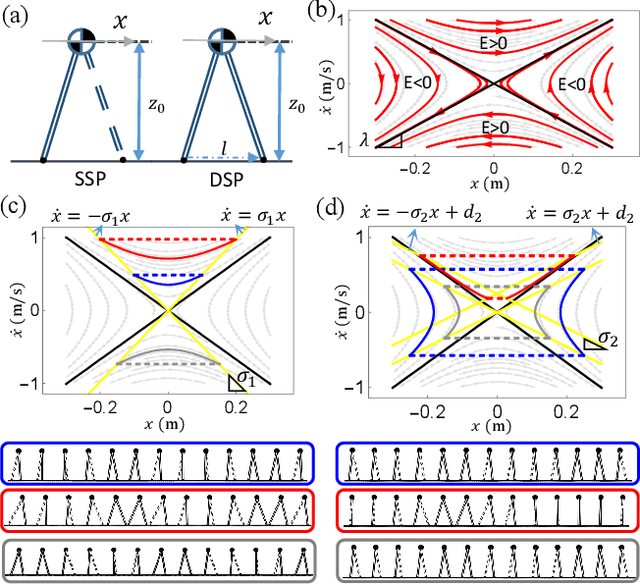
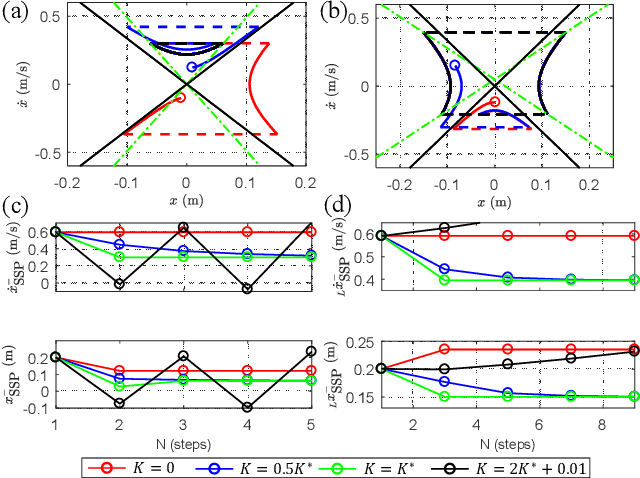
A Hybrid passive Linear Inverted Pendulum (HLIP) model is proposed for characterizing, stabilizing and composing periodic orbits for 3D underactuated bipedal walking. Specifically, Period-1 (P1) and Period-2 (P2) orbits are geometrically characterized in the state space of the H-LIP. Stepping controllers are designed for global stabilization of the orbits. Valid ranges of the gains and their optimality are derived. The optimal stepping controller is used to create and stabilize the walking of bipedal robots. An actuated Spring-loaded Inverted Pendulum (aSLIP) model and the underactuated robot Cassie are used for illustration. Both the aSLIP walking with P1 or P2 orbits and the Cassie walking with all 3D compositions of the P1 and P2 orbits can be smoothly generated and stabilized from a stepping-in-place motion. This approach provides a perspective and a methodology towards continuous gait generation and stabilization for 3D underactuated walking robots.
Bipedal Hopping: Reduced-order Model Embedding via Optimization-based Control
Aug 03, 2018
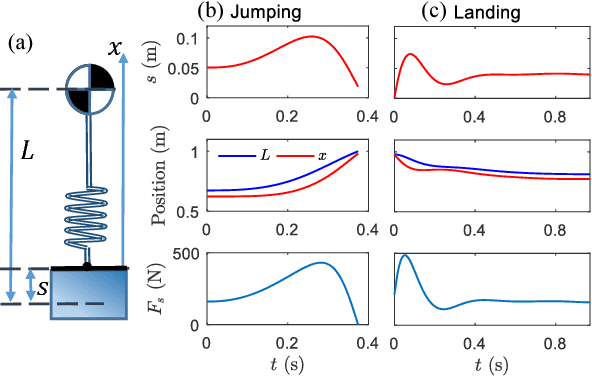
This paper presents the design and validation of controlling hopping on the 3D bipedal robot Cassie. A spring-mass model is identified from the kinematics and compliance of the robot. The spring stiffness and damping are encapsulated by the leg length, thus actuating the leg length can create and control hopping behaviors. Trajectory optimization via direct collocation is performed on the spring-mass model to plan jumping and landing motions. The leg length trajectories are utilized as desired outputs to synthesize a control Lyapunov function based quadratic program (CLF-QP). Centroidal angular momentum, taking as an addition output in the CLF-QP, is also stabilized in the jumping phase to prevent whole body rotation in the underactuated flight phase. The solution to the CLF-QP is a nonlinear feedback control law that achieves dynamic jumping behaviors on bipedal robots with compliance. The framework presented in this paper is verified experimentally on the bipedal robot Cassie.
The Robotarium: A remotely accessible swarm robotics research testbed
Sep 15, 2016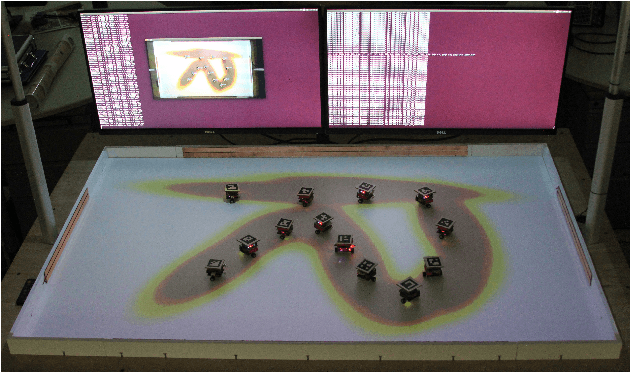
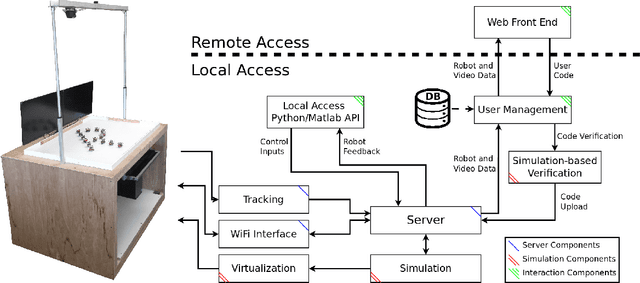
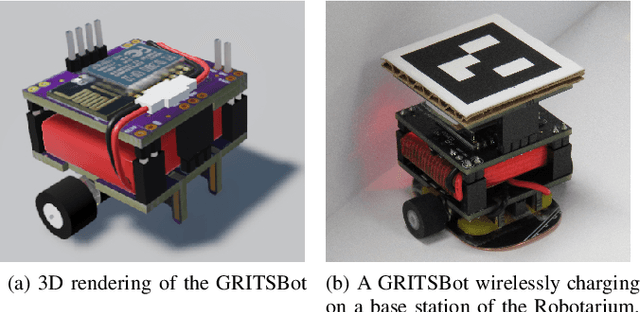
This paper describes the Robotarium -- a remotely accessible, multi-robot research facility. The impetus behind the Robotarium is that multi-robot testbeds constitute an integral and essential part of the multi-robot research cycle, yet they are expensive, complex, and time-consuming to develop, operate, and maintain. These resource constraints, in turn, limit access for large groups of researchers and students, which is what the Robotarium is remedying by providing users with remote access to a state-of-the-art multi-robot test facility. This paper details the design and operation of the Robotarium and discusses the considerations one must take when making complex hardware remotely accessible. In particular, safety must be built into the system already at the design phase without overly constraining what coordinated control programs users can upload and execute, which calls for minimally invasive safety routines with provable performance guarantees.
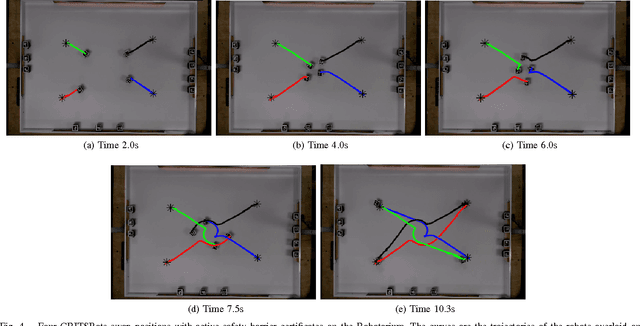
Safety Barrier Certificates for Heterogeneous Multi-Robot Systems
Sep 02, 2016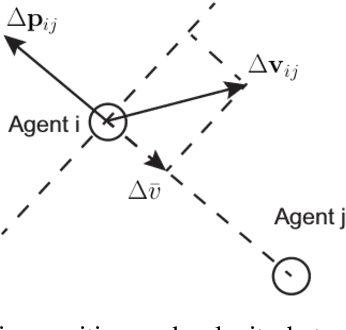
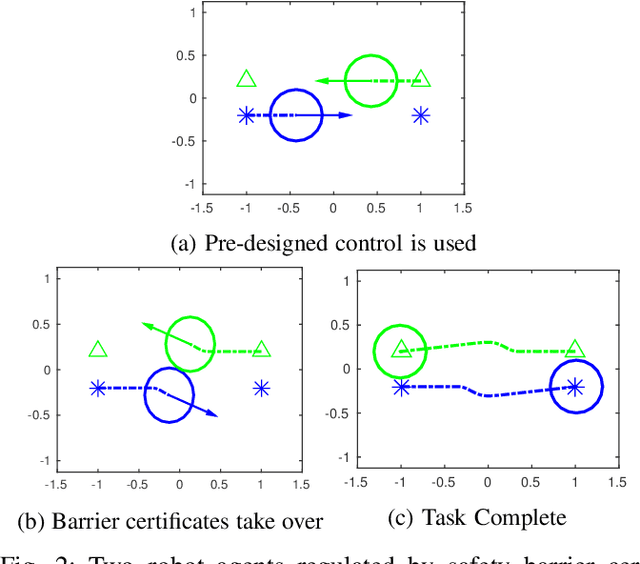
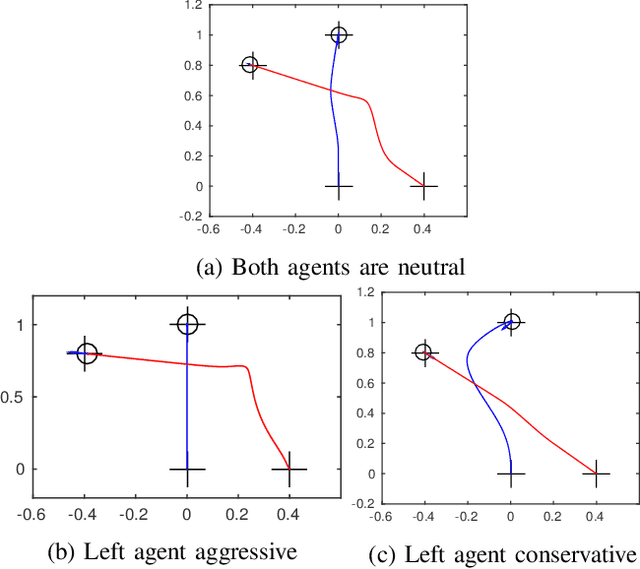
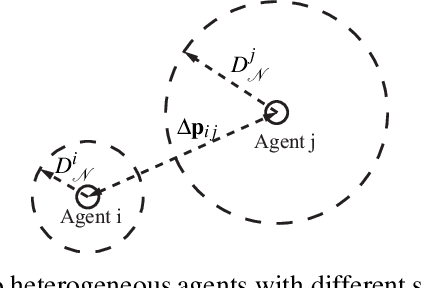
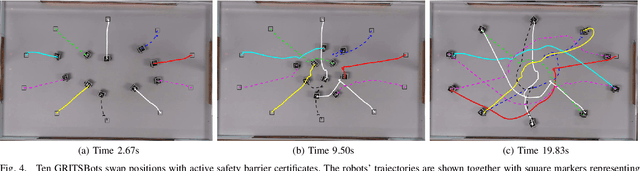
This paper presents a formal framework for collision avoidance in multi-robot systems, wherein an existing controller is modified in a minimally invasive fashion to ensure safety. We build this framework through the use of control barrier functions (CBFs) which guarantee forward invariance of a safe set; these yield safety barrier certificates in the context of heterogeneous robot dynamics subject to acceleration bounds. Moreover, safety barrier certificates are extended to a distributed control framework, wherein neighboring agent dynamics are unknown, through local parameter identification. The end result is an optimization-based controller that formally guarantees collision free behavior in heterogeneous multi-agent systems by minimally modifying the desired controller via safety barrier constraints. This formal result is verified in simulation on a multi-robot system consisting of both cumbersome and agile robots, is demonstrated experimentally on a system with a Magellan Pro robot and three Khepera III robots.
* 8 pages version of 2016ACC conference paper, experimental results added
Safe, Remote-Access Swarm Robotics Research on the Robotarium
Apr 03, 2016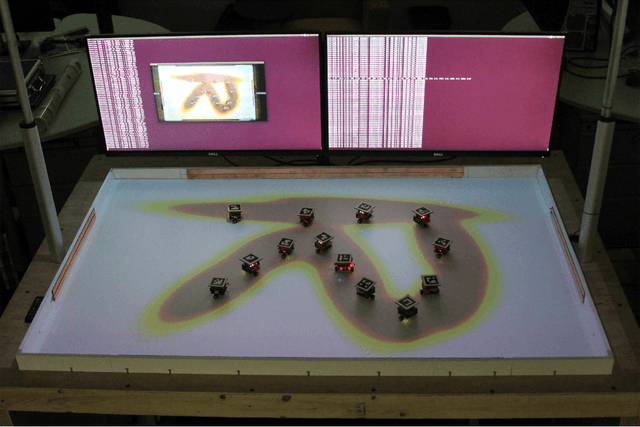
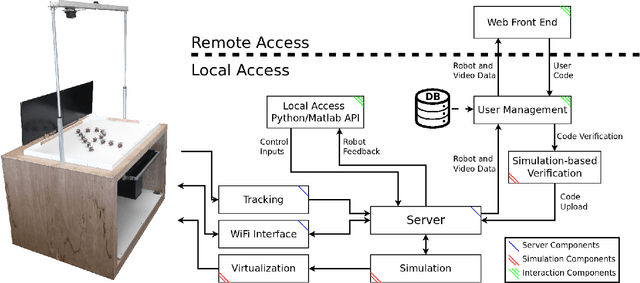
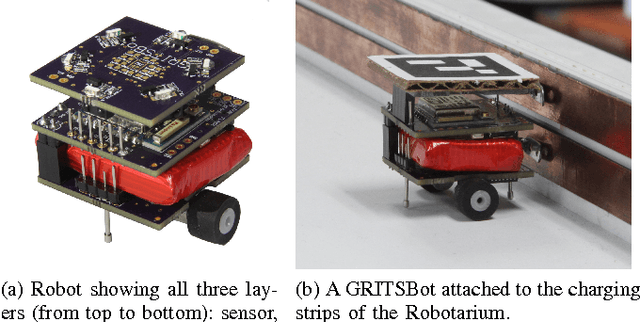
This paper describes the development of the Robotarium -- a remotely accessible, multi-robot research facility. The impetus behind the Robotarium is that multi-robot testbeds constitute an integral and essential part of the multi-agent research cycle, yet they are expensive, complex, and time-consuming to develop, operate, and maintain. These resource constraints, in turn, limit access for large groups of researchers and students, which is what the Robotarium is remedying by providing users with remote access to a state-of-the-art multi-robot test facility. This paper details the design and operation of the Robotarium as well as connects these to the particular considerations one must take when making complex hardware remotely accessible. In particular, safety must be built in already at the design phase without overly constraining which coordinated control programs the users can upload and execute, which calls for minimally invasive safety routines with provable performance guarantees.