 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROScopter: A Multirotor Autopilot based on ROSflight 2.0
Mar 05, 2026ROScopter is a lean multirotor autopilot built for researchers. ROScopter seeks to accelerate simulation and hardware testing of research code with an architecture that is both easy to understand and simple to modify. ROScopter is designed to interface with ROSflight 2.0 and runs entirely on an onboard flight computer, leveraging the features of ROS 2 to improve modularity. This work describes the architecture of ROScopter and how it can be used to test application code in both simulated and hardware environments. Hardware results of the default ROScopter behavior are presented, showing that ROScopter achieves similar performance to another state-of-the-art autopilot for basic waypoint-following maneuvers, but with a significantly reduced and more modular code-base.
Comparative Analysis of Control Barrier Functions and Artificial Potential Fields for Obstacle Avoidance
Oct 19, 2020
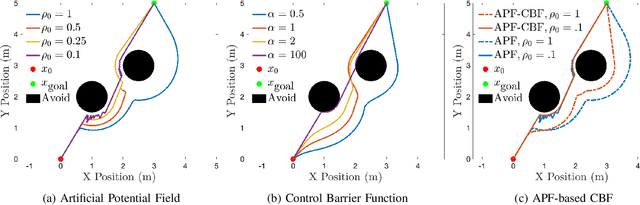
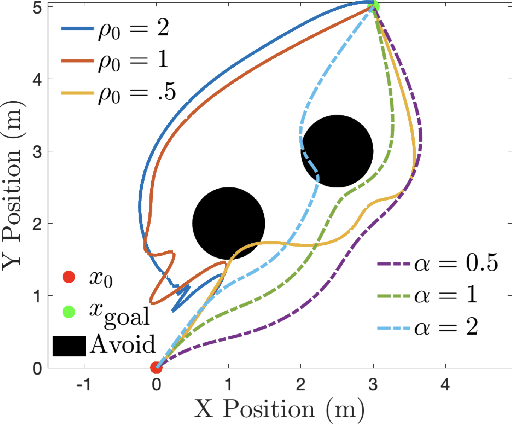

Artificial potential fields (APFs) and their variants have been a staple for collision avoidance of mobile robots and manipulators for almost 40 years. Its model-independent nature, ease of implementation, and real-time performance have played a large role in its continued success over the years. Control barrier functions (CBFs), on the other hand, are a more recent development, commonly used to guarantee safety for nonlinear systems in real-time in the form of a filter on a nominal controller. In this paper, we address the connections between APFs and CBFs. At a theoretic level, we prove that APFs are a special case of CBFs: given a APF one obtains a CBFs, while the converse is not true. Additionally, we prove that CBFs obtained from APFs have additional beneficial properties and can be applied to nonlinear systems. Practically, we compare the performance of APFs and CBFs in the context of obstacle avoidance on simple illustrative examples and for a quadrotor, both in simulation and on hardware using onboard sensing. These comparisons demonstrate that CBFs outperform APFs.