 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Spatio-Temporal Super-Resolution of Dynamical Systems using Physics-Informed Deep-Learning
Dec 08, 2022
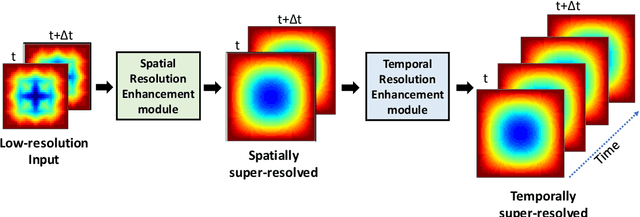
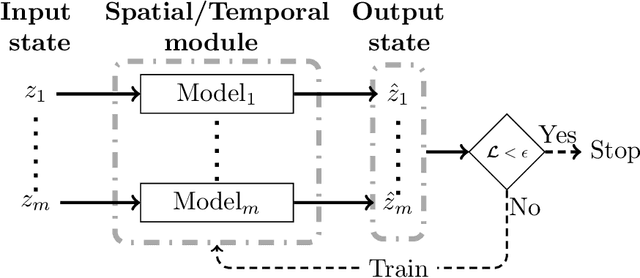
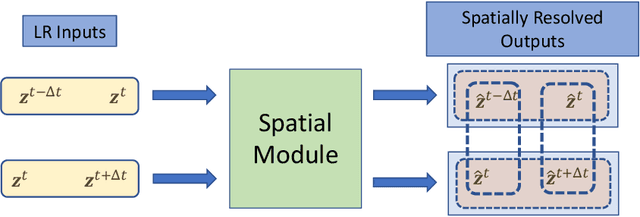
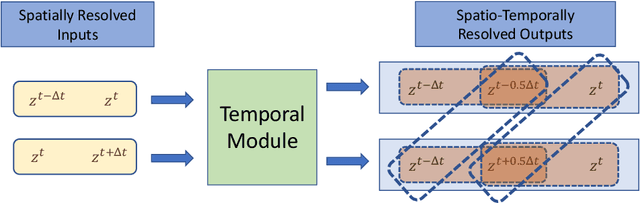
This work presents a physics-informed deep learning-based super-resolution framework to enhance the spatio-temporal resolution of the solution of time-dependent partial differential equations (PDE). Prior works on deep learning-based super-resolution models have shown promise in accelerating engineering design by reducing the computational expense of traditional numerical schemes. However, these models heavily rely on the availability of high-resolution (HR) labeled data needed during training. In this work, we propose a physics-informed deep learning-based framework to enhance the spatial and temporal resolution of coarse-scale (both in space and time) PDE solutions without requiring any HR data. The framework consists of two trainable modules independently super-resolving the PDE solution, first in spatial and then in temporal direction. The physics based losses are implemented in a novel way to ensure tight coupling between the spatio-temporally refined outputs at different times and improve framework accuracy. We analyze the capability of the developed framework by investigating its performance on an elastodynamics problem. It is observed that the proposed framework can successfully super-resolve (both in space and time) the low-resolution PDE solutions while satisfying physics-based constraints and yielding high accuracy. Furthermore, the analysis and obtained speed-up show that the proposed framework is well-suited for integration with traditional numerical methods to reduce computational complexity during engineering design.
Test-Time Adaptation with Shape Moments for Image Segmentation
May 16, 2022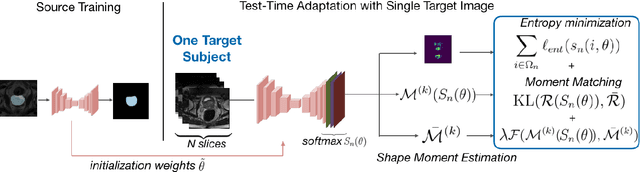
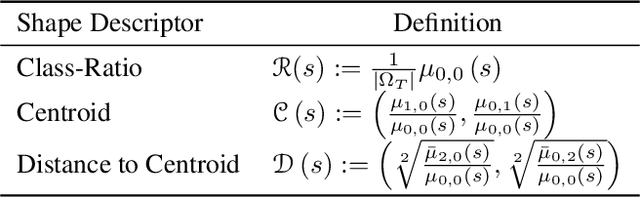
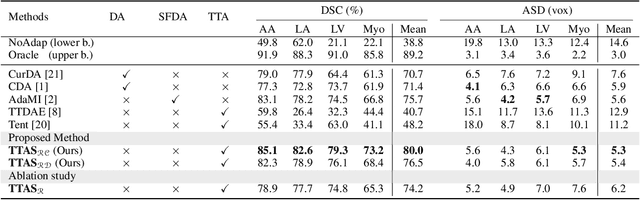
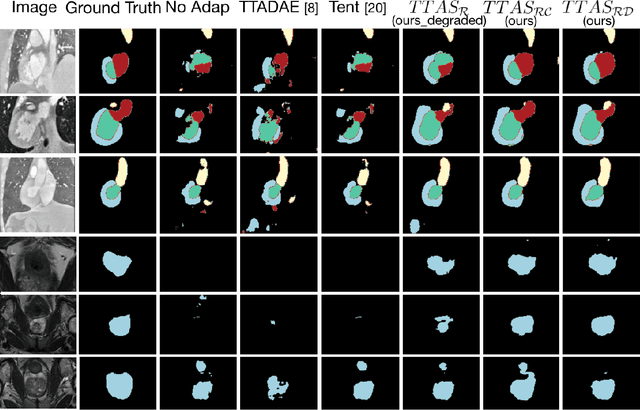
Supervised learning is well-known to fail at generalization under distribution shifts. In typical clinical settings, the source data is inaccessible and the target distribution is represented with a handful of samples: adaptation can only happen at test time on a few or even a single subject(s). We investigate test-time single-subject adaptation for segmentation, and propose a Shape-guided Entropy Minimization objective for tackling this task. During inference for a single testing subject, our loss is minimized with respect to the batch normalization's scale and bias parameters. We show the potential of integrating various shape priors to guide adaptation to plausible solutions, and validate our method in two challenging scenarios: MRI-to-CT adaptation of cardiac segmentation and cross-site adaptation of prostate segmentation. Our approach exhibits substantially better performances than the existing test-time adaptation methods. Even more surprisingly, it fares better than state-of-the-art domain adaptation methods, although it forgoes training on additional target data during adaptation. Our results question the usefulness of training on target data in segmentation adaptation, and points to the substantial effect of shape priors on test-time inference. Our framework can be readily used for integrating various priors and for adapting any segmentation network, and our code is available.
Age of Information of a Power Constrained Scheduler in the Presence of a Power Constrained Adversary
Jan 03, 2023We consider a time slotted communication network consisting of a base station (BS), an adversary, $N$ users and $N_s$ communication channels. Both the BS and the adversary have average power constraints and the probability of successful transmission of an update packet depends on the transmission power of the BS and the blocking power of the adversary. We provide a universal lower bound for the average age for this communication network. We prove that the uniform scheduling algorithm with any feasible transmission power choosing policy is $4$ optimal; and the max-age user choosing policy is $2$ optimal. In the second part of the paper, we consider the setting where the BS chooses a transmission policy and the adversary chooses a blocking policy from the set of randomized stationary policies. We show that the Nash equilibrium point may or may not exist for this communication network. We find special cases where the Nash equilibrium always exists.
Energy Efficient Design of Extreme Massive MIMO
Jan 03, 2023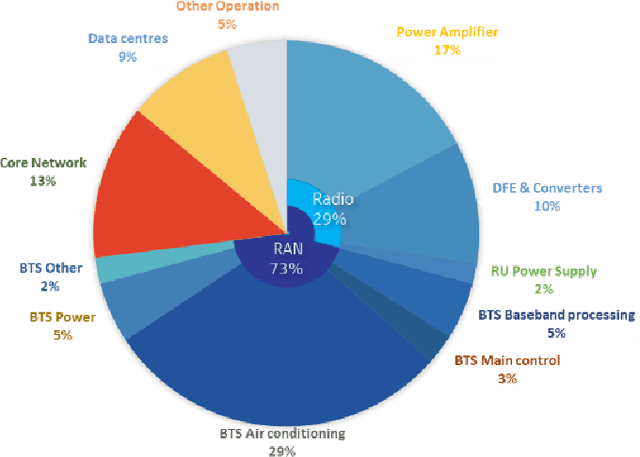
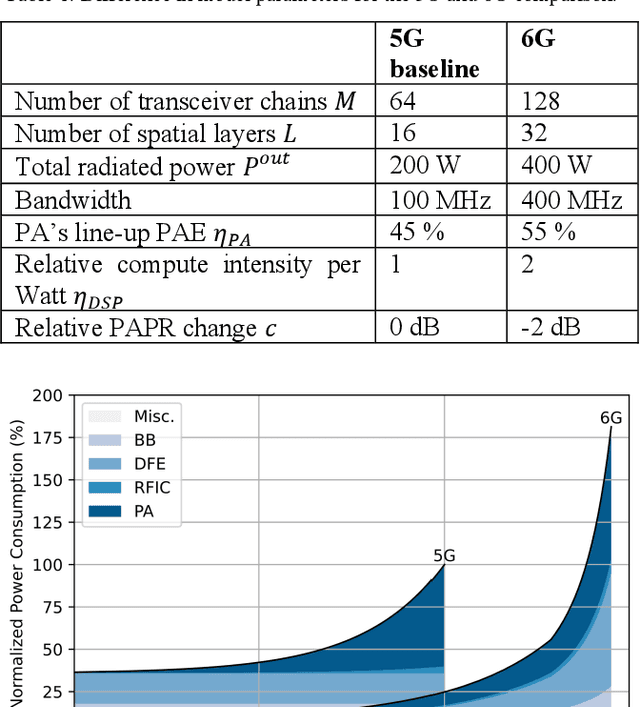
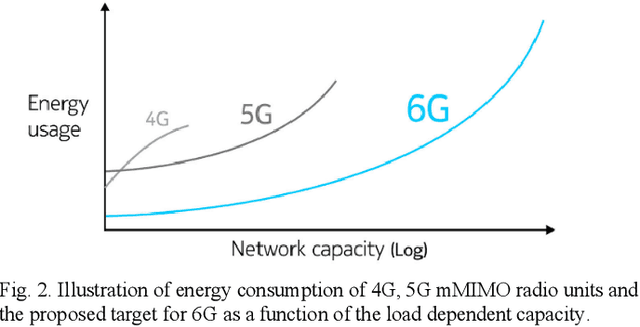

Ever since the invention of Bell Laboratories Layer Space-Time (BLAST) in mid 1990s, the focus of MIMO research and development has been largely on pushing the limit of spectral efficiency. While massive MIMO technologies laid the foundation of high throughput in 5G and beyond, energy efficiency of the associated radio system leaves much room for improvement. With the substantial negative implications of climate change looming ever closer, enabling sustainability is of paramount importance for any future technology, and minimizing energy use is a key dimension of achieving sustainability. Thus, every aspect of 6G design, implementation, and operation will be scrutinized to maximize energy efficiency. An analysis of the massive MIMO 5G radio energy consumption at different loads reveals under what specific conditions 6G should outperform 5G, setting qualitative energy efficiency design goals for 6G. Following this, we propose some design principles for the 6G, focusing on novel operational, component technology, and architecture innovations to minimize energy consumption.
Measuring tail risk at high-frequency: An $L_1$-regularized extreme value regression approach with unit-root predictors
Jan 03, 2023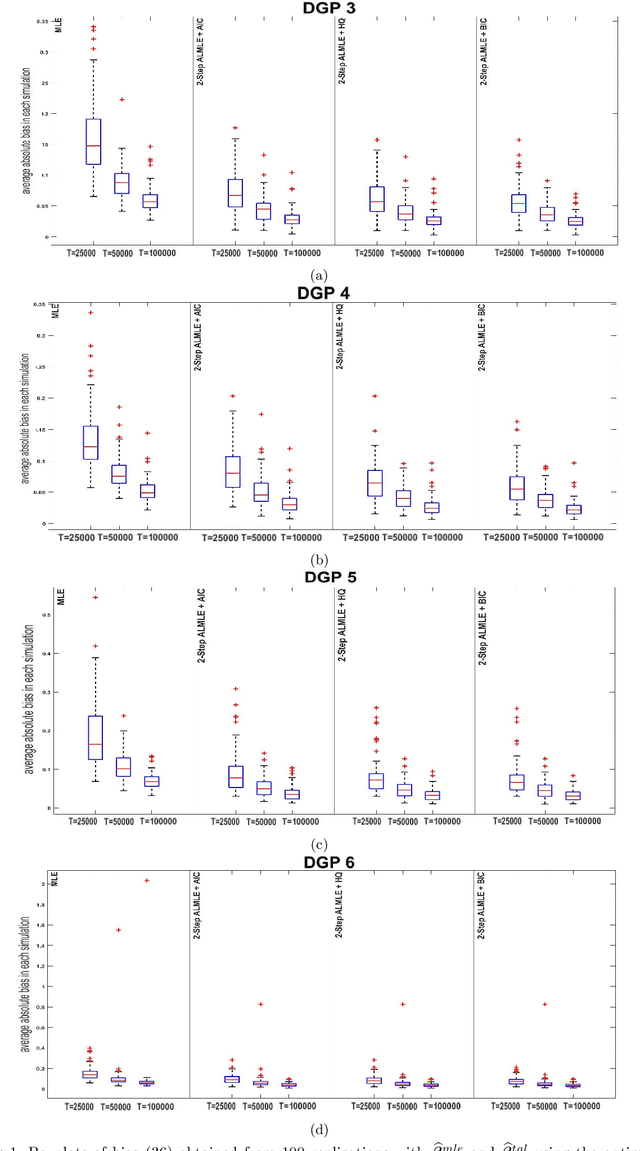
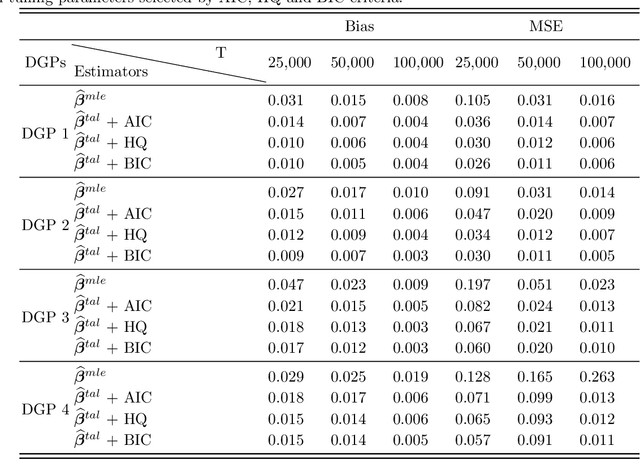
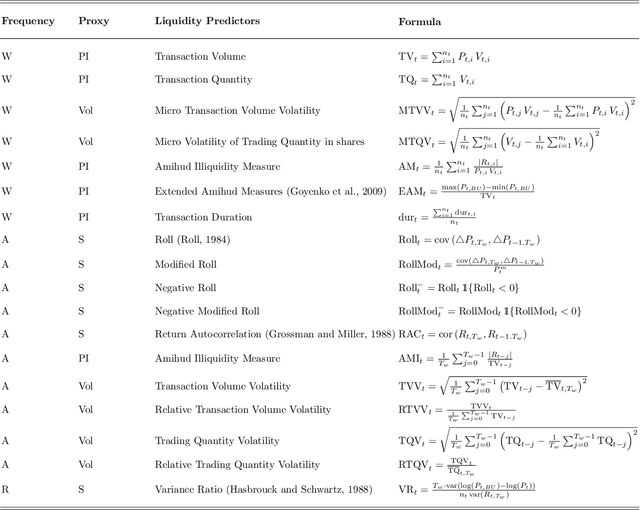
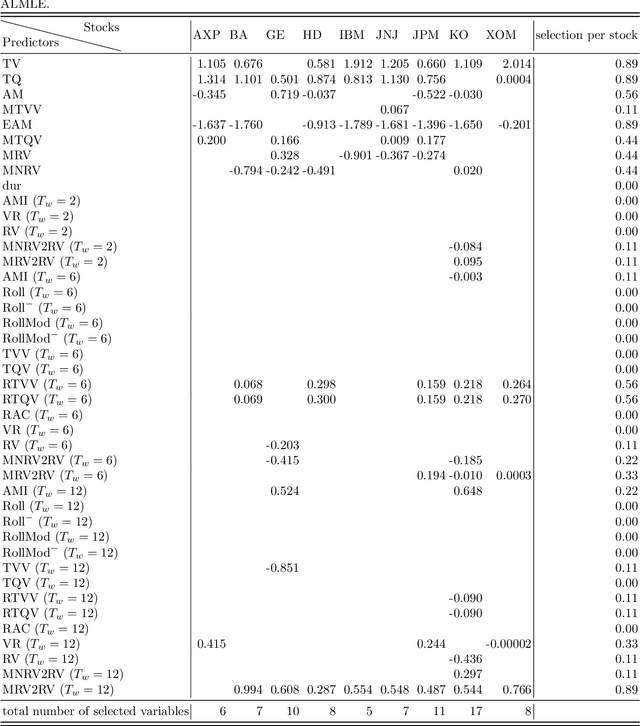
We study tail risk dynamics in high-frequency financial markets and their connection with trading activity and market uncertainty. We introduce a dynamic extreme value regression model accommodating both stationary and local unit-root predictors to appropriately capture the time-varying behaviour of the distribution of high-frequency extreme losses. To characterize trading activity and market uncertainty, we consider several volatility and liquidity predictors, and propose a two-step adaptive $L_1$-regularized maximum likelihood estimator to select the most appropriate ones. We establish the oracle property of the proposed estimator for selecting both stationary and local unit-root predictors, and show its good finite sample properties in an extensive simulation study. Studying the high-frequency extreme losses of nine large liquid U.S. stocks using 42 liquidity and volatility predictors, we find the severity of extreme losses to be well predicted by low levels of price impact in period of high volatility of liquidity and volatility.
Transformers in Time Series: A Survey
Mar 07, 2022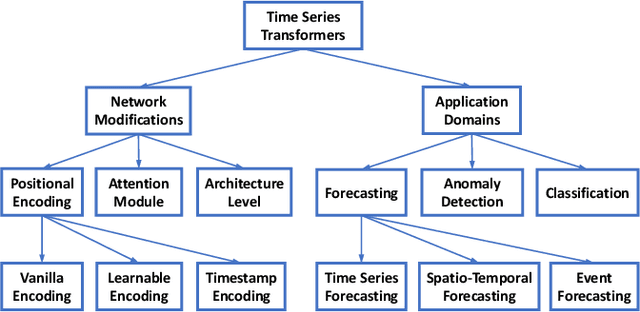
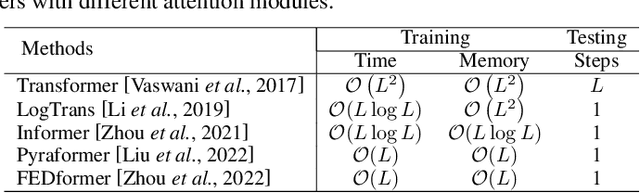
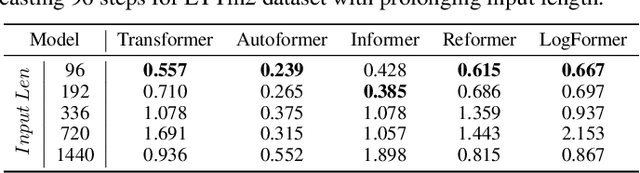
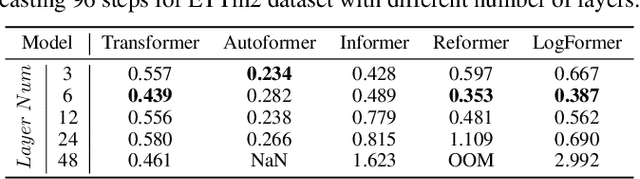
Transformers have achieved superior performances in many tasks in natural language processing and computer vision, which also intrigues great interests in the time series community. Among multiple advantages of transformers, the ability to capture long-range dependencies and interactions is especially attractive for time series modeling, leading to exciting progress in various time series applications. In this paper, we systematically review transformer schemes for time series modeling by highlighting their strengths as well as limitations through a new taxonomy to summarize existing time series transformers in two perspectives. From the perspective of network modifications, we summarize the adaptations of module level and architecture level of the time series transformers. From the perspective of applications, we categorize time series transformers based on common tasks including forecasting, anomaly detection, and classification. Empirically, we perform robust analysis, model size analysis, and seasonal-trend decomposition analysis to study how Transformers perform in time series. Finally, we discuss and suggest future directions to provide useful research guidance. A corresponding resource list that will be continuously updated can be found in the GitHub repository. To the best of our knowledge, this paper is the first work to comprehensively and systematically summarize the recent advances of Transformers for modeling time series data. We hope this survey will ignite further research interests in time series Transformers.
Digital-twin-enhanced metal tube bending forming real-time prediction method based on Multi-source-input MTL
Jul 03, 2022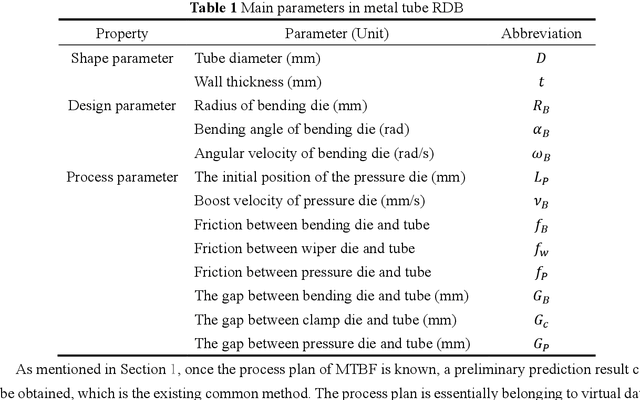
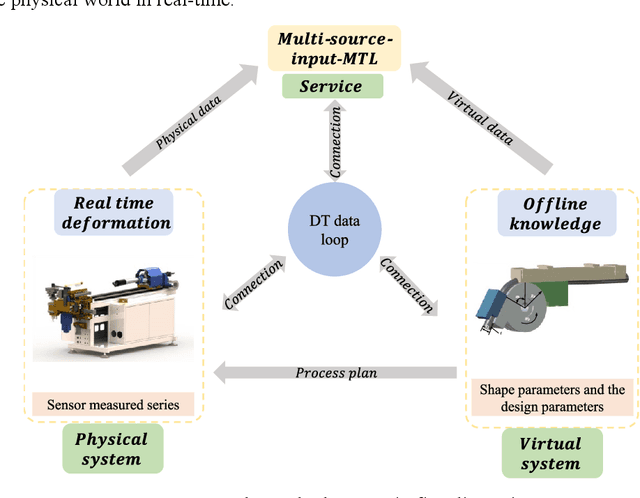

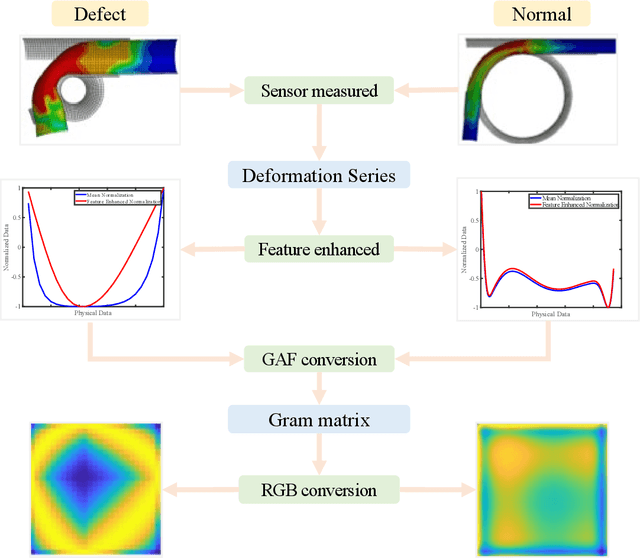
As one of the most widely used metal tube bending methods, the rotary draw bending (RDB) process enables reliable and high-precision metal tube bending forming (MTBF). The forming accuracy is seriously affected by the springback and other potential forming defects, of which the mechanism analysis is difficult to deal with. At the same time, the existing methods are mainly conducted in offline space, ignoring the real-time information in the physical world, which is unreliable and inefficient. To address this issue, a digital-twin-enhanced (DT-enhanced) metal tube bending forming real-time prediction method based on multi-source-input multi-task learning (MTL) is proposed. The new method can achieve comprehensive MTBF real-time prediction. By sharing the common feature of the multi-close domain and adopting group regularization strategy on feature sharing and accepting layers, the accuracy and efficiency of the multi-source-input MTL can be guaranteed. Enhanced by DT, the physical real-time deformation data is aligned in the image dimension by an improved Grammy Angle Field (GAF) conversion, realizing the reflection of the actual processing. Different from the traditional offline prediction methods, the new method integrates the virtual and physical data to achieve a more efficient and accurate real-time prediction result. and the DT mapping connection between virtual and physical systems can be achieved. To exclude the effects of equipment errors, the effectiveness of the proposed method is verified on the physical experiment-verified FE simulation scenarios. At the same time, the common pre-training networks are compared with the proposed method. The results show that the proposed DT-enhanced prediction method is more accurate and efficient.
Where to go: Agent Guidance with Deep Reinforcement Learning in A City-Scale Online Ride-Hailing Service
Dec 12, 2022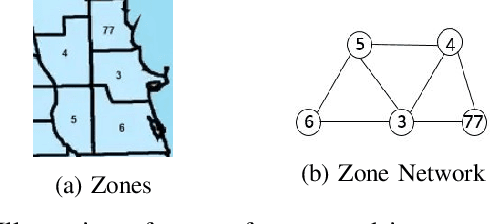
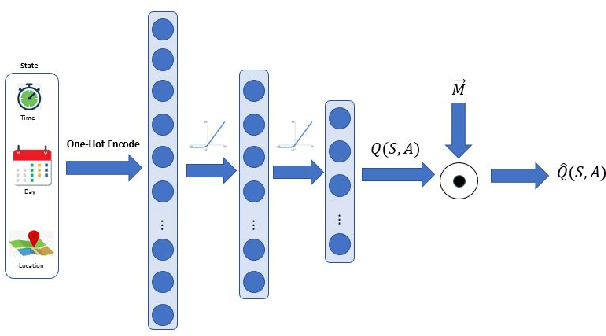
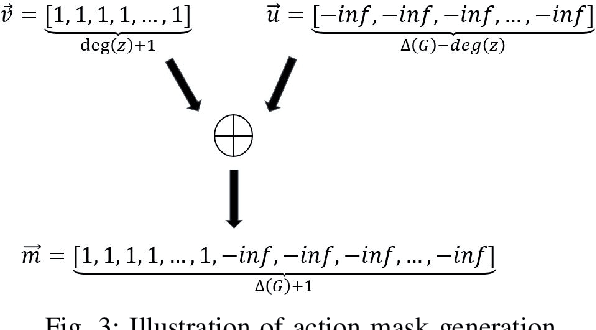
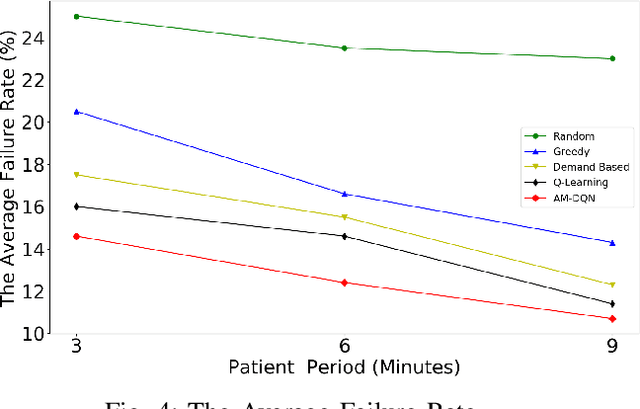
Online ride-hailing services have become a prevalent transportation system across the world. In this paper, we study a challenging problem of how to direct vacant taxis around a city such that supplies and demands can be balanced in online ride-hailing services. We design a new reward scheme that considers multiple performance metrics of online ride-hailing services. We also propose a novel deep reinforcement learning method named Deep-Q-Network with Action Mask (AM-DQN) masking off unnecessary actions in various locations such that agents can learn much faster and more efficiently. We conduct extensive experiments using a city-scale dataset from Chicago. Several popular heuristic and learning methods are also implemented as baselines for comparison. The results of the experiments show that the AM-DQN attains the best performances of all methods with respect to average failure rate, average waiting time for customers, and average idle search time for vacant taxis.
Reservoir kernels and Volterra series
Dec 30, 2022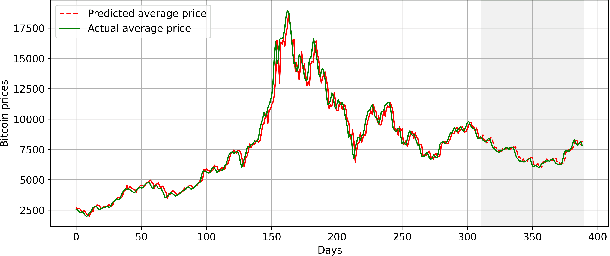
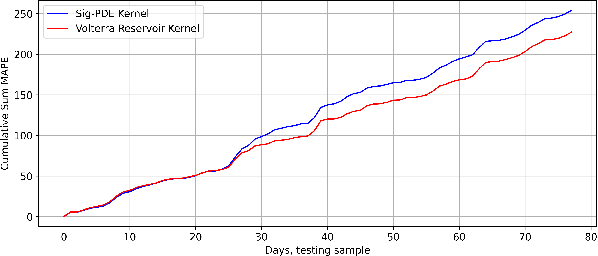
A universal kernel is constructed whose sections approximate any causal and time-invariant filter in the fading memory category with inputs and outputs in a finite-dimensional Euclidean space. This kernel is built using the reservoir functional associated with a state-space representation of the Volterra series expansion available for any analytic fading memory filter. It is hence called the Volterra reservoir kernel. Even though the state-space representation and the corresponding reservoir feature map are defined on an infinite-dimensional tensor algebra space, the kernel map is characterized by explicit recursions that are readily computable for specific data sets when employed in estimation problems using the representer theorem. We showcase the performance of the Volterra reservoir kernel in a popular data science application in relation to bitcoin price prediction.
Decentralized iLQR for Cooperative Trajectory Planning of Connected Autonomous Vehicles via Dual Consensus ADMM
Jan 11, 2023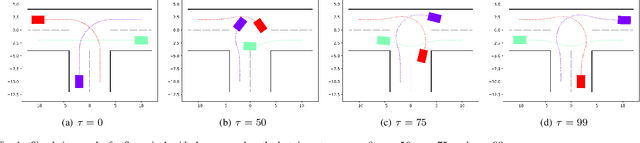
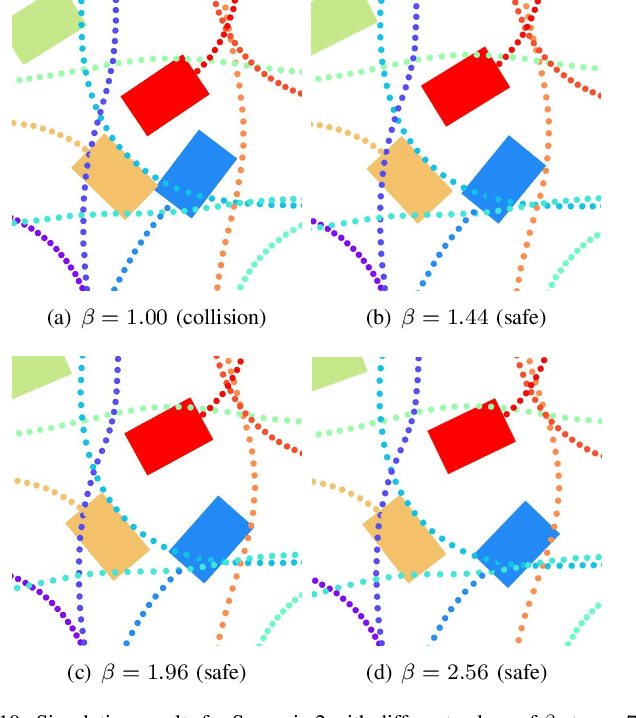
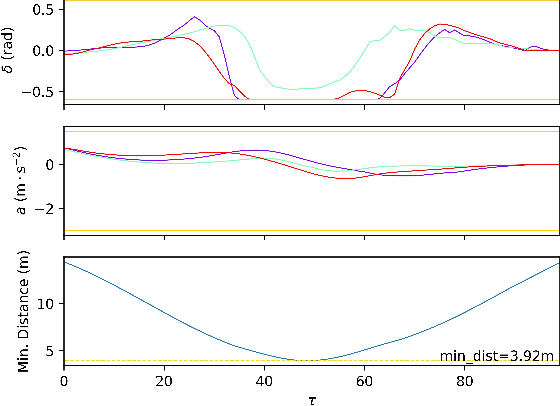
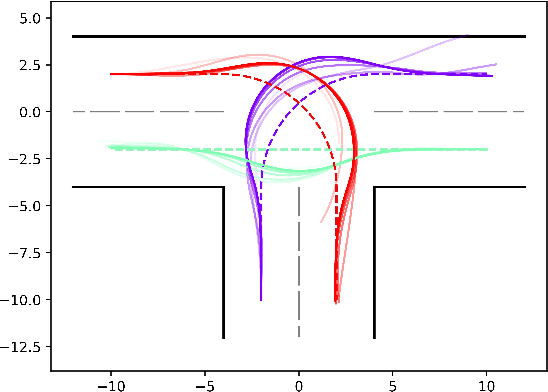
Developments in cooperative trajectory planning of connected autonomous vehicles (CAVs) have gathered considerable momentum and research attention. Generally, such problems present strong non-linearity and non-convexity, rendering great difficulties in finding the optimal solution. Existing methods typically suffer from low computational efficiency, and this hinders the appropriate applications in large-scale scenarios involving an increasing number of vehicles. To tackle this problem, we propose a novel decentralized iterative linear quadratic regulator (iLQR) algorithm by leveraging the dual consensus alternating direction method of multipliers (ADMM). First, the original non-convex optimization problem is reformulated into a series of convex optimization problems through iterative neighbourhood approximation. Then, the dual of each convex optimization problem is shown to have a consensus structure, which facilitates the use of consensus ADMM to solve for the dual solution in a fully decentralized and parallel architecture. Finally, the primal solution corresponding to the trajectory of each vehicle is recovered by solving a linear quadratic regulator (LQR) problem iteratively, and a novel trajectory update strategy is proposed to ensure the dynamic feasibility of vehicles. With the proposed development, the computation burden is significantly alleviated such that real-time performance is attainable. Two traffic scenarios are presented to validate the proposed algorithm, and thorough comparisons between our proposed method and baseline methods (including centralized iLQR, IPOPT, and SQP) are conducted to demonstrate the scalability of the proposed approach.