 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Causal Discovery from Subsampled Time Series with Proxy Variables
May 09, 2023
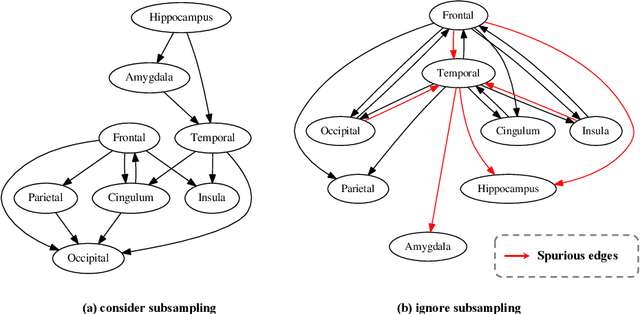
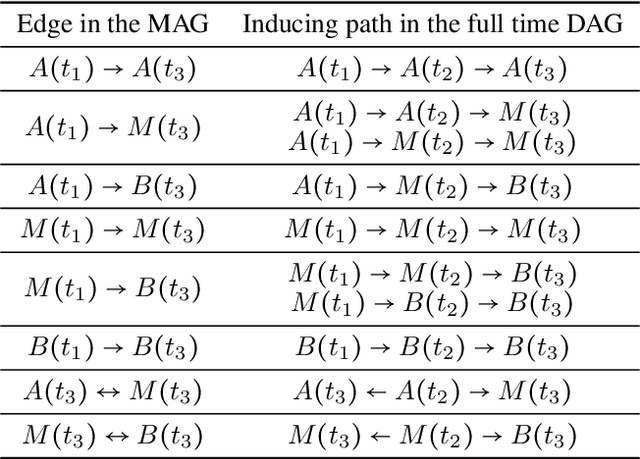
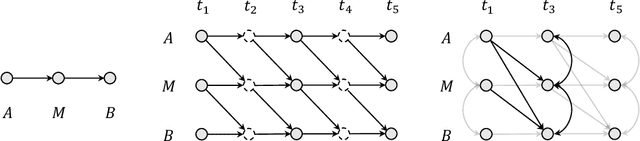
Inferring causal structures from time series data is the central interest of many scientific inquiries. A major barrier to such inference is the problem of subsampling, i.e., the frequency of measurements is much lower than that of causal influence. To overcome this problem, numerous model-based and model-free methods have been proposed, yet either limited to the linear case or failed to establish identifiability. In this work, we propose a model-free algorithm that can identify the entire causal structure from subsampled time series, without any parametric constraint. The idea is that the challenge of subsampling arises mainly from \emph{unobserved} time steps and therefore should be handled with tools designed for unobserved variables. Among these tools, we find the proxy variable approach particularly fits, in the sense that the proxy of an unobserved variable is naturally itself at the observed time step. Following this intuition, we establish comprehensive structural identifiability results. Our method is constraint-based and requires no more regularities than common continuity and differentiability. Theoretical advantages are reflected in experimental results.
Combining feature aggregation and geometric similarity for re-identification of patterned animals
Aug 11, 2023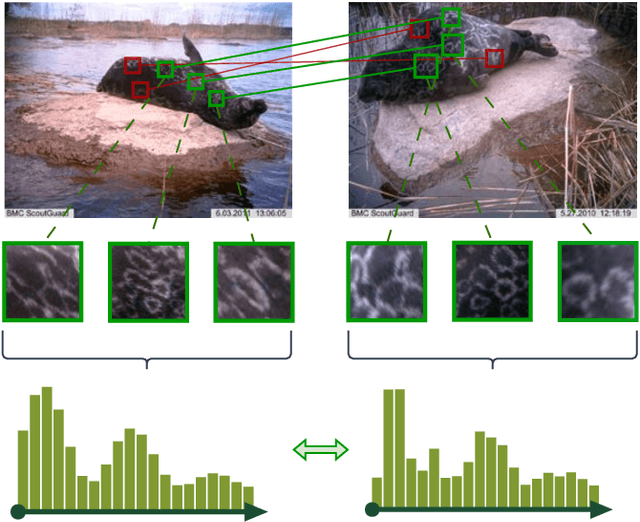
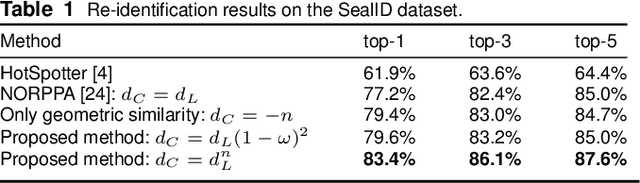
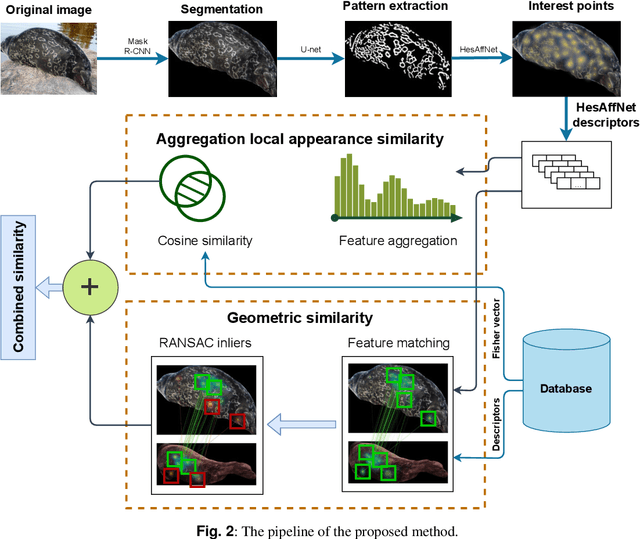
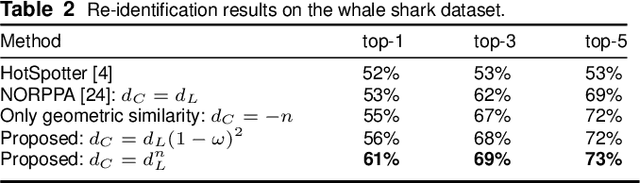
Image-based re-identification of animal individuals allows gathering of information such as migration patterns of the animals over time. This, together with large image volumes collected using camera traps and crowdsourcing, opens novel possibilities to study animal populations. For many species, the re-identification can be done by analyzing the permanent fur, feather, or skin patterns that are unique to each individual. In this paper, we address the re-identification by combining two types of pattern similarity metrics: 1) pattern appearance similarity obtained by pattern feature aggregation and 2) geometric pattern similarity obtained by analyzing the geometric consistency of pattern similarities. The proposed combination allows to efficiently utilize both the local and global pattern features, providing a general re-identification approach that can be applied to a wide variety of different pattern types. In the experimental part of the work, we demonstrate that the method achieves promising re-identification accuracies for Saimaa ringed seals and whale sharks.
LLM As DBA
Aug 11, 2023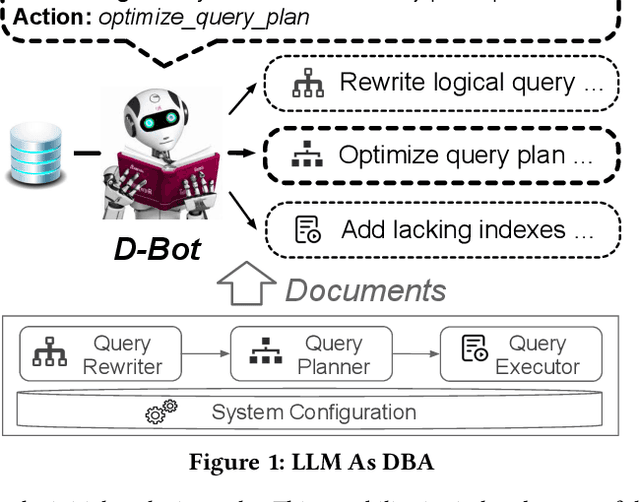
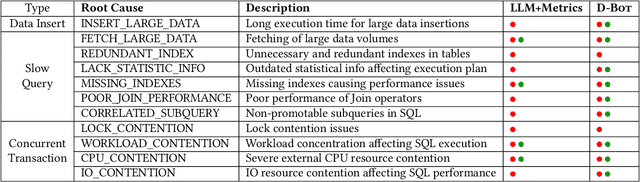
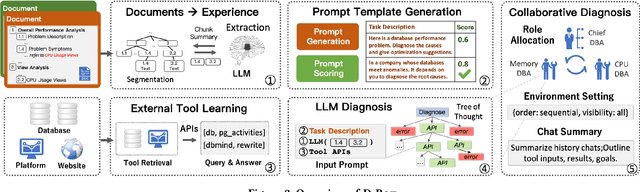
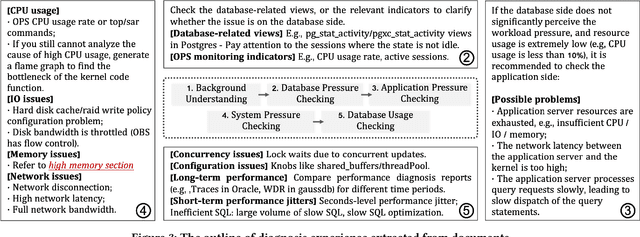
Database administrators (DBAs) play a crucial role in managing, maintaining and optimizing a database system to ensure data availability, performance, and reliability. However, it is hard and tedious for DBAs to manage a large number of database instances (e.g., millions of instances on the cloud databases). Recently large language models (LLMs) have shown great potential to understand valuable documents and accordingly generate reasonable answers. Thus, we propose D-Bot, a LLM-based database administrator that can continuously acquire database maintenance experience from textual sources, and provide reasonable, well-founded, in-time diagnosis and optimization advice for target databases. This paper presents a revolutionary LLM-centric framework for database maintenance, including (i) database maintenance knowledge detection from documents and tools, (ii) tree of thought reasoning for root cause analysis, and (iii) collaborative diagnosis among multiple LLMs. Our preliminary experimental results that D-Bot can efficiently and effectively diagnose the root causes and our code is available at github.com/TsinghuaDatabaseGroup/DB-GPT.
Majority Vote Computation With Complementary Sequences for Distributed UAV Guidance
Aug 11, 2023This study introduces a novel non-coherent over-the-air computation (OAC) scheme aimed at achieving reliable majority vote (MV) calculations in fading channels. The proposed approach relies on modulating the amplitude of the elements of complementary sequences (CSs) based on the sign of the parameters to be aggregated. Notably, our method eliminates the reliance on channel state information at the nodes, rendering it compatible with time-varying channels. To demonstrate the efficacy of our approach, we employ it in a scenario where an unmanned aerial vehicle (UAV) is guided by distributed sensors, relying on the MV computed using our proposed scheme. The experimental results confirm the superiority of our approach, as evidenced by a significant reduction in computation error rates in fading channels, particularly with longer sequence lengths. Meanwhile, we ensure that the peak-to-mean-envelope power ratio of the transmitted orthogonal frequency division multiplexing signals remains within or below 3 dB.
Robust estimation of exposure ratios in multi-exposure image stacks
Aug 12, 2023
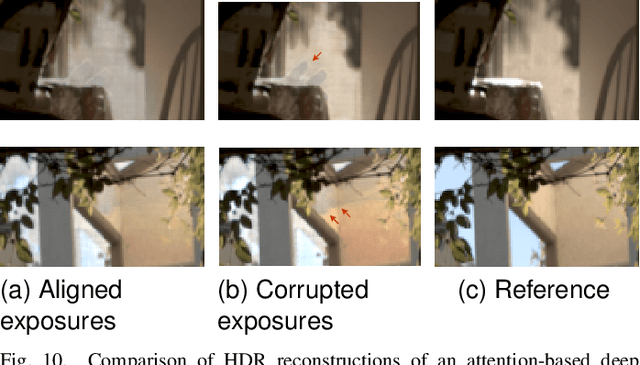
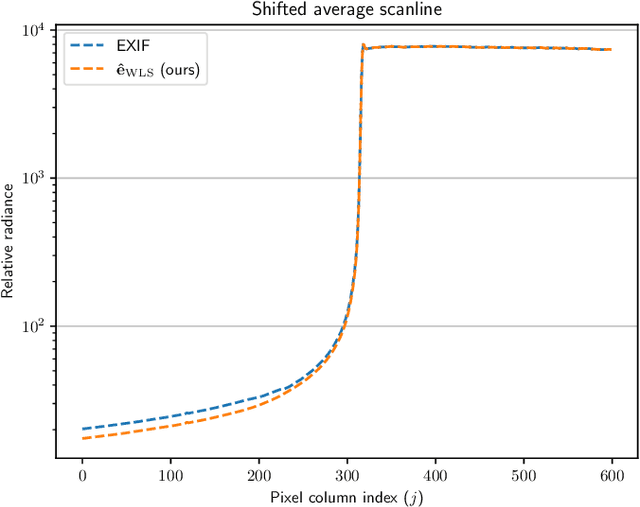
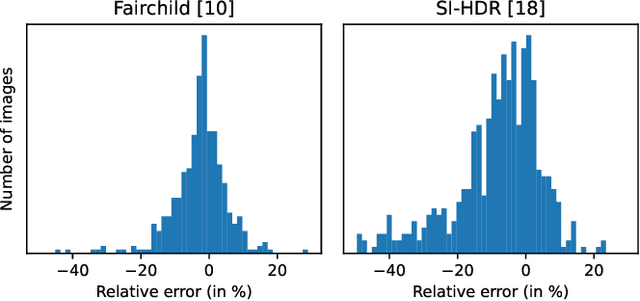
Merging multi-exposure image stacks into a high dynamic range (HDR) image requires knowledge of accurate exposure times. When exposure times are inaccurate, for example, when they are extracted from a camera's EXIF metadata, the reconstructed HDR images reveal banding artifacts at smooth gradients. To remedy this, we propose to estimate exposure ratios directly from the input images. We derive the exposure time estimation as an optimization problem, in which pixels are selected from pairs of exposures to minimize estimation error caused by camera noise. When pixel values are represented in the logarithmic domain, the problem can be solved efficiently using a linear solver. We demonstrate that the estimation can be easily made robust to pixel misalignment caused by camera or object motion by collecting pixels from multiple spatial tiles. The proposed automatic exposure estimation and alignment eliminates banding artifacts in popular datasets and is essential for applications that require physically accurate reconstructions, such as measuring the modulation transfer function of a display. The code for the method is available.
* 11 pages, 11 figures, journal
Neural Latent Aligner: Cross-trial Alignment for Learning Representations of Complex, Naturalistic Neural Data
Aug 12, 2023Understanding the neural implementation of complex human behaviors is one of the major goals in neuroscience. To this end, it is crucial to find a true representation of the neural data, which is challenging due to the high complexity of behaviors and the low signal-to-ratio (SNR) of the signals. Here, we propose a novel unsupervised learning framework, Neural Latent Aligner (NLA), to find well-constrained, behaviorally relevant neural representations of complex behaviors. The key idea is to align representations across repeated trials to learn cross-trial consistent information. Furthermore, we propose a novel, fully differentiable time warping model (TWM) to resolve the temporal misalignment of trials. When applied to intracranial electrocorticography (ECoG) of natural speaking, our model learns better representations for decoding behaviors than the baseline models, especially in lower dimensional space. The TWM is empirically validated by measuring behavioral coherence between aligned trials. The proposed framework learns more cross-trial consistent representations than the baselines, and when visualized, the manifold reveals shared neural trajectories across trials.
* Accepted at ICML 2023
Advancing Brain-Computer Interface System Performance in Hand Trajectory Estimation with NeuroKinect
Aug 16, 2023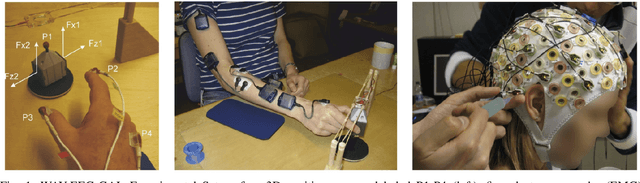
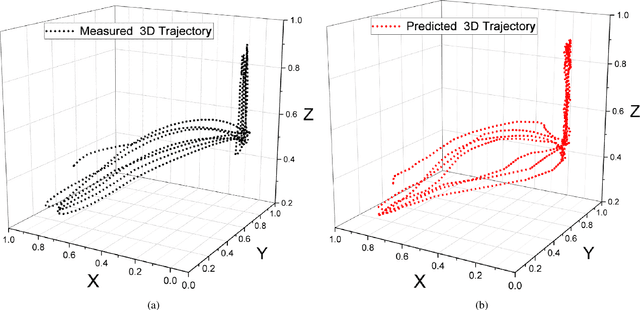
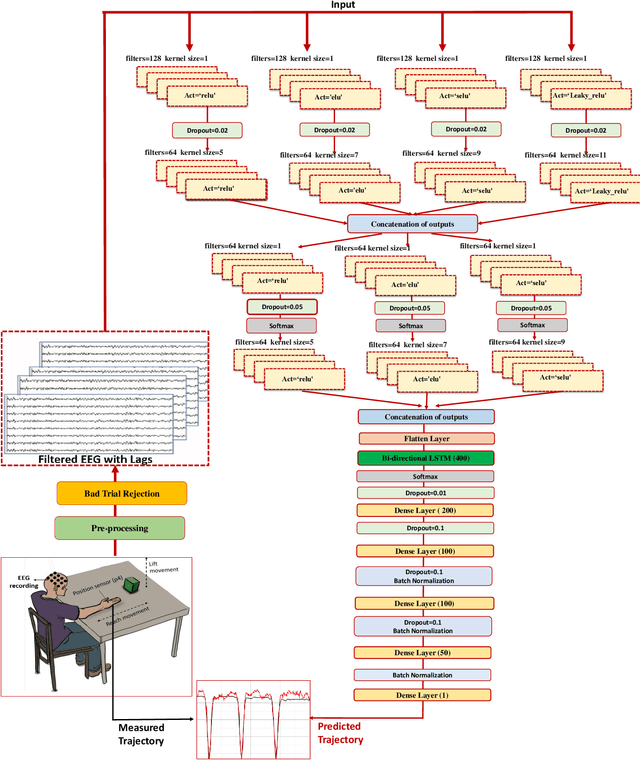
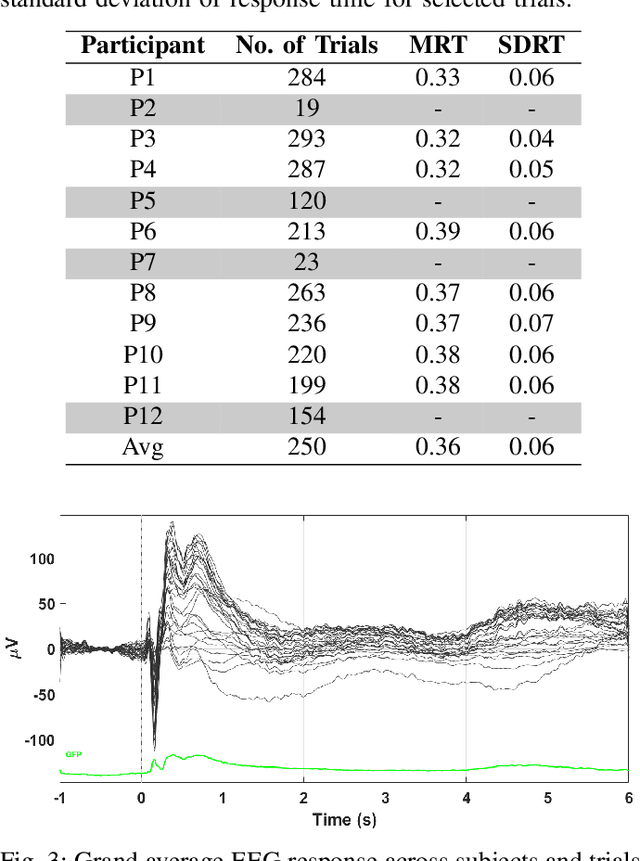
Brain-computer interface (BCI) technology enables direct communication between the brain and external devices, allowing individuals to control their environment using brain signals. However, existing BCI approaches face three critical challenges that hinder their practicality and effectiveness: a) time-consuming preprocessing algorithms, b) inappropriate loss function utilization, and c) less intuitive hyperparameter settings. To address these limitations, we present \textit{NeuroKinect}, an innovative deep-learning model for accurate reconstruction of hand kinematics using electroencephalography (EEG) signals. \textit{NeuroKinect} model is trained on the Grasp and Lift (GAL) tasks data with minimal preprocessing pipelines, subsequently improving the computational efficiency. A notable improvement introduced by \textit{NeuroKinect} is the utilization of a novel loss function, denoted as $\mathcal{L}_{\text{Stat}}$. This loss function addresses the discrepancy between correlation and mean square error in hand kinematics prediction. Furthermore, our study emphasizes the scientific intuition behind parameter selection to enhance accuracy. We analyze the spatial and temporal dynamics of the motor movement task by employing event-related potential and brain source localization (BSL) results. This approach provides valuable insights into the optimal parameter selection, improving the overall performance and accuracy of the \textit{NeuroKinect} model. Our model demonstrates strong correlations between predicted and actual hand movements, with mean Pearson correlation coefficients of 0.92 ($\pm$0.015), 0.93 ($\pm$0.019), and 0.83 ($\pm$0.018) for the X, Y, and Z dimensions. The precision of \textit{NeuroKinect} is evidenced by low mean squared errors (MSE) of 0.016 ($\pm$0.001), 0.015 ($\pm$0.002), and 0.017 ($\pm$0.005) for the X, Y, and Z dimensions, respectively.
Theoretical Analyses of Evolutionary Algorithms on Time-Linkage OneMax with General Weights
May 11, 2023Evolutionary computation has shown its superiority in dynamic optimization, but for the (dynamic) time-linkage problems, some theoretical studies have revealed the possible weakness of evolutionary computation. Since the theoretically analyzed time-linkage problem only considers the influence of an extremely strong negative time-linkage effect, it remains unclear whether the weakness also appears in problems with more general time-linkage effects. Besides, understanding in depth the relationship between time-linkage effect and algorithmic features is important to build up our knowledge of what algorithmic features are good at what kinds of problems. In this paper, we analyze the general time-linkage effect and consider the time-linkage OneMax with general weights whose absolute values reflect the strength and whose sign reflects the positive or negative influence. We prove that except for some small and positive time-linkage effects (that is, for weights $0$ and $1$), randomized local search (RLS) and (1+1)EA cannot converge to the global optimum with a positive probability. More precisely, for the negative time-linkage effect (for negative weights), both algorithms cannot efficiently reach the global optimum and the probability of failing to converge to the global optimum is at least $1-o(1)$. For the not so small positive time-linkage effect (positive weights greater than $1$), such a probability is at most $c+o(1)$ where $c$ is a constant strictly less than $1$.
CBGL: Fast Monte Carlo Passive Global Localisation of 2D LIDAR Sensor
Jul 28, 2023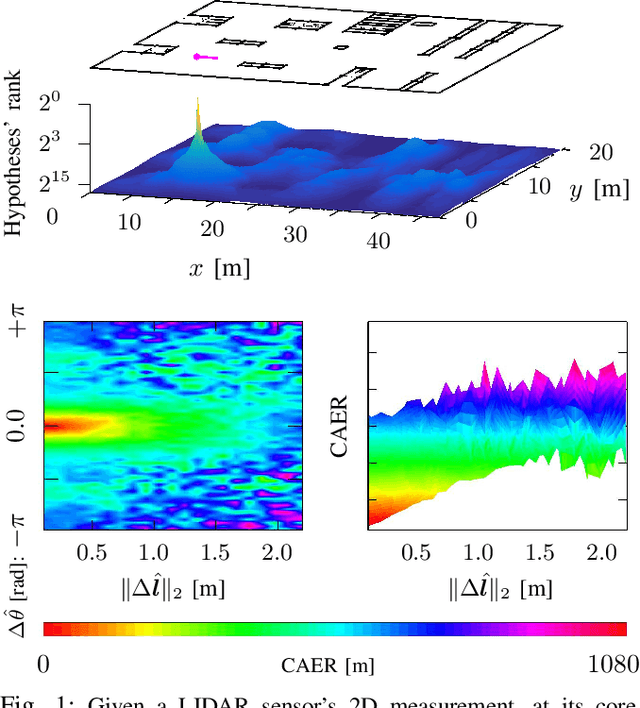
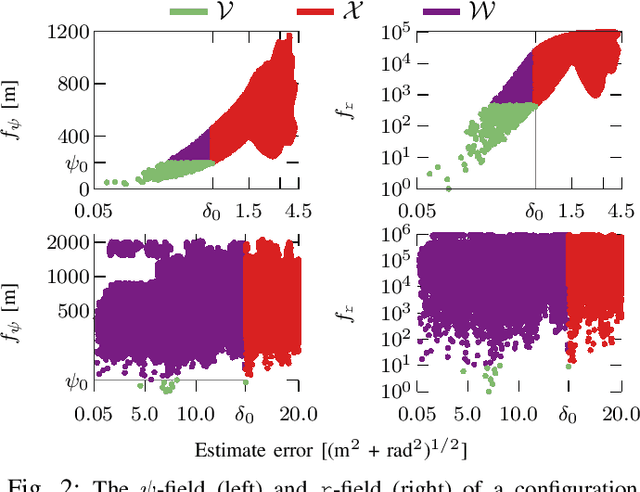
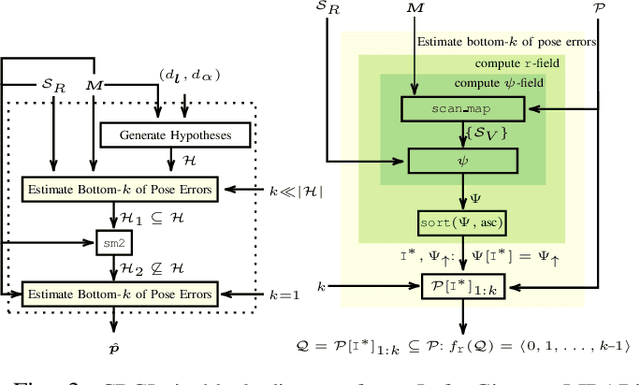
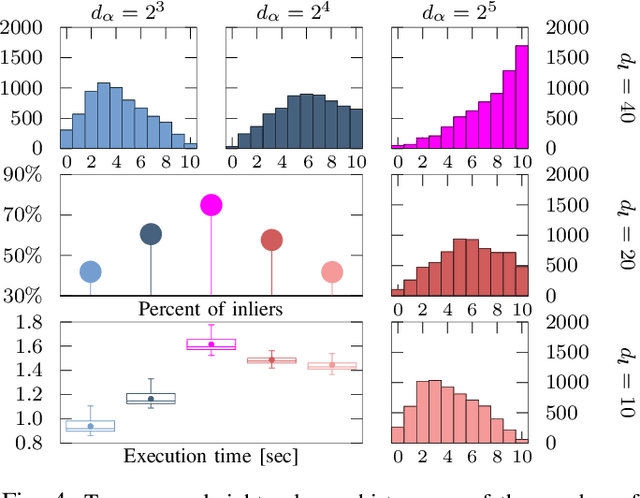
Navigation of a mobile robot is conditioned on the knowledge of its pose. In observer-based localisation configurations its initial pose may not be knowable in advance, leading to the need of its estimation. Solutions to the problem of global localisation are either robust against noise and environment arbitrariness but require motion and time, which may (need to) be economised on, or require minimal estimation time but assume environmental structure, may be sensitive to noise, and demand preprocessing and tuning. This article proposes a method that retains the strengths and avoids the weaknesses of the two approaches. The method leverages properties of the Cumulative Absolute Error per Ray metric with respect to the errors of pose estimates of a 2D LIDAR sensor, and utilises scan--to--map-scan matching for fine(r) pose approximations. A large number of tests, in real and simulated conditions, involving disparate environments and sensor properties, illustrate that the proposed method outperforms state-of-the-art methods of both classes of solutions in terms of pose discovery rate and execution time. The source code is available for download.
Data-Driven Nonlinear TDOA for Accurate Source Localization in Complex Signal Dynamics
Aug 03, 2023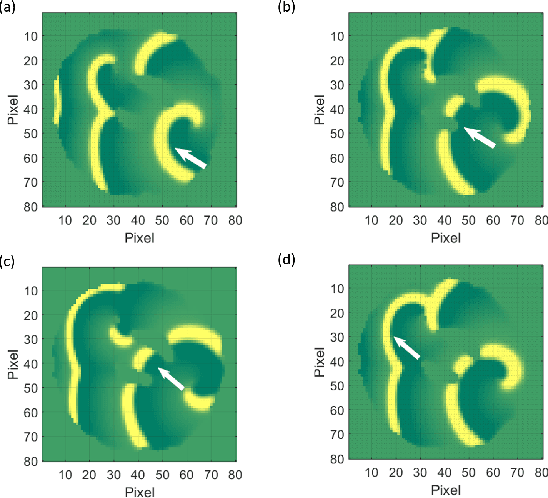
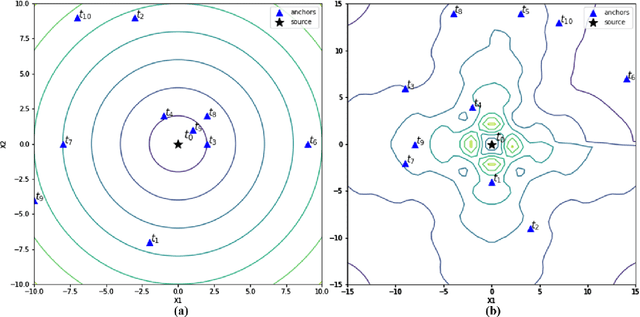
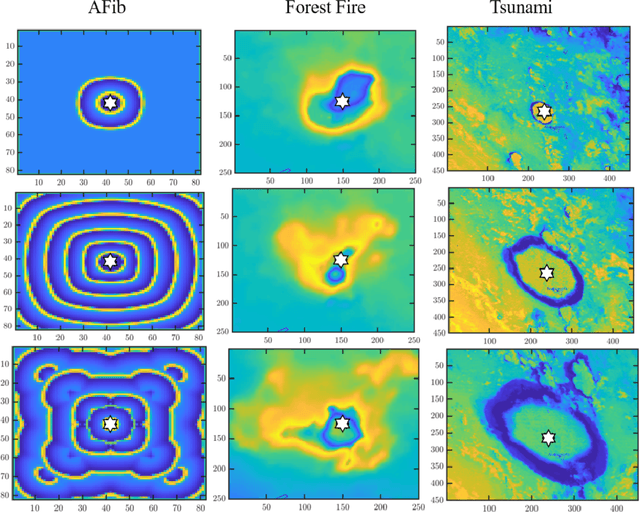
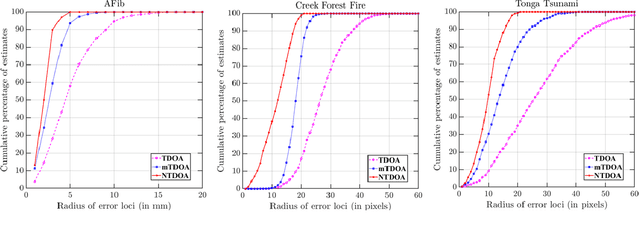
The complex and dynamic propagation of oscillations and waves is often triggered by sources at unknown locations. Accurate source localization enables the elimination of the rotor core in atrial fibrillation (AFib) as an effective treatment for such severe cardiac disorder; it also finds potential use in locating the spreading source in natural disasters such as forest fires and tsunamis. However, existing approaches such as time of arrival (TOA) and time difference of arrival (TDOA) do not yield accurate localization results since they tacitly assume a constant signal propagation speed whereas realistic propagation is often non-static and heterogeneous. In this paper, we develop a nonlinear TDOA (NTDOA) approach which utilizes observational data from various positions to jointly learn the propagation speed at different angles and distances as well as the location of the source itself. Through examples of simulating the complex dynamics of electrical signals along the surface of the heart and satellite imagery from forest fires and tsunamis, we show that with a small handful of measurements, NTDOA, as a data-driven approach, can successfully locate the spreading source, leading also to better forecasting of the speed and direction of subsequent propagation.