 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Segmentation-assisted Scene Completion for LiDAR Point Clouds
Paper and Code
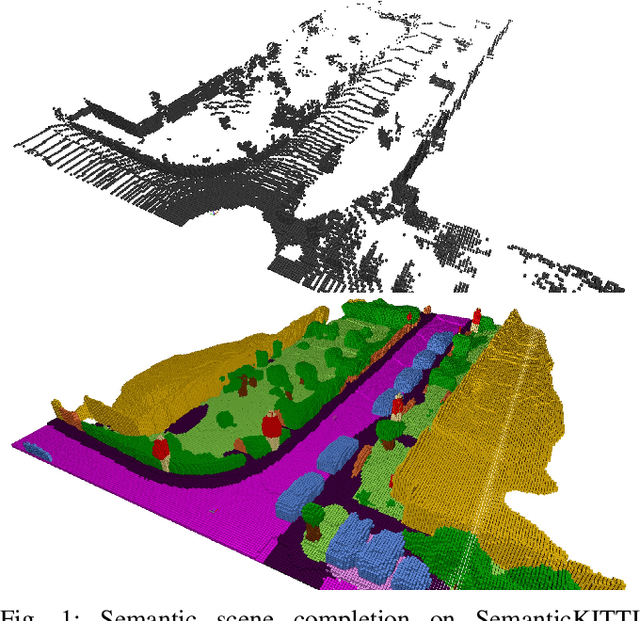
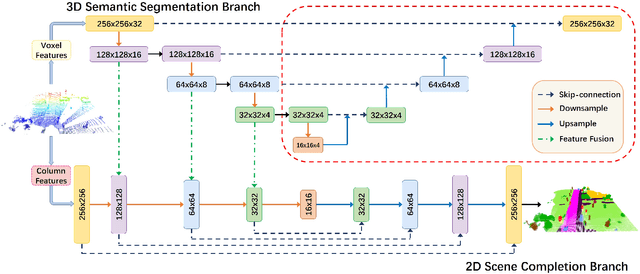
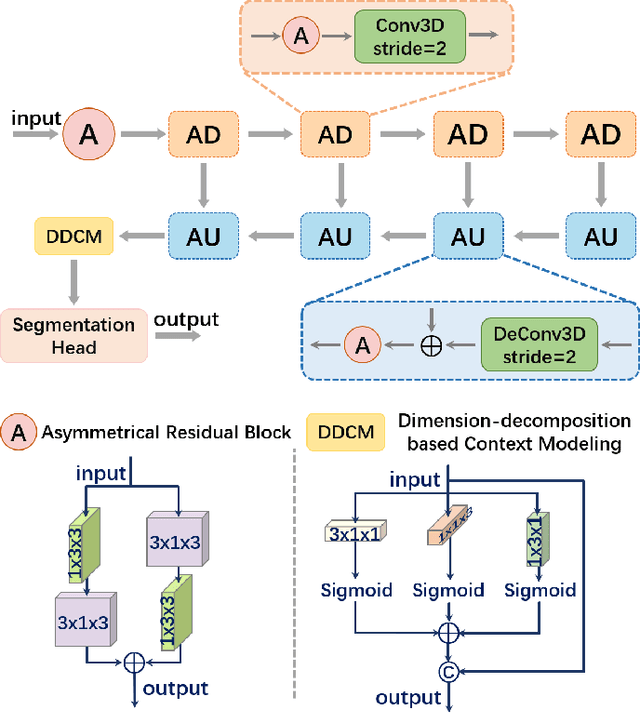
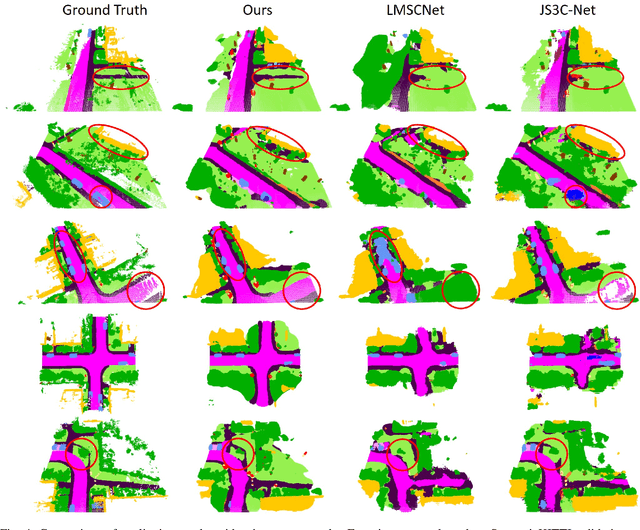
Outdoor scene completion is a challenging issue in 3D scene understanding, which plays an important role in intelligent robotics and autonomous driving. Due to the sparsity of LiDAR acquisition, it is far more complex for 3D scene completion and semantic segmentation. Since semantic features can provide constraints and semantic priors for completion tasks, the relationship between them is worth exploring. Therefore, we propose an end-to-end semantic segmentation-assisted scene completion network, including a 2D completion branch and a 3D semantic segmentation branch. Specifically, the network takes a raw point cloud as input, and merges the features from the segmentation branch into the completion branch hierarchically to provide semantic information. By adopting BEV representation and 3D sparse convolution, we can benefit from the lower operand while maintaining effective expression. Besides, the decoder of the segmentation branch is used as an auxiliary, which can be discarded in the inference stage to save computational consumption. Extensive experiments demonstrate that our method achieves competitive performance on SemanticKITTI dataset with low latency. Code and models will be released at https://github.com/jokester-zzz/SSA-SC.