 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObjectNav Revisited: On Evaluation of Embodied Agents Navigating to Objects
Paper and Code
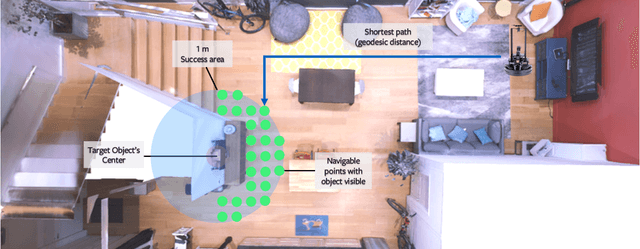

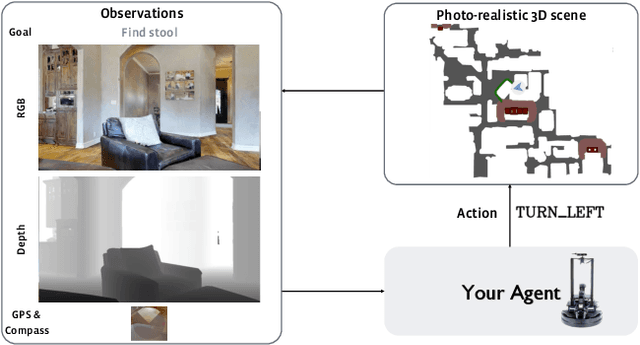
We revisit the problem of Object-Goal Navigation (ObjectNav). In its simplest form, ObjectNav is defined as the task of navigating to an object, specified by its label, in an unexplored environment. In particular, the agent is initialized at a random location and pose in an environment and asked to find an instance of an object category, e.g., find a chair, by navigating to it. As the community begins to show increased interest in semantic goal specification for navigation tasks, a number of different often-inconsistent interpretations of this task are emerging. This document summarizes the consensus recommendations of this working group on ObjectNav. In particular, we make recommendations on subtle but important details of evaluation criteria (for measuring success when navigating towards a target object), the agent's embodiment parameters, and the characteristics of the environments within which the task is carried out. Finally, we provide a detailed description of the instantiation of these recommendations in challenges organized at the Embodied AI workshop at CVPR 2020 \url{http://embodied-ai.org} .