 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReasonPlan: Unified Scene Prediction and Decision Reasoning for Closed-loop Autonomous Driving
May 26, 2025Due to the powerful vision-language reasoning and generalization abilities, multimodal large language models (MLLMs) have garnered significant attention in the field of end-to-end (E2E) autonomous driving. However, their application to closed-loop systems remains underexplored, and current MLLM-based methods have not shown clear superiority to mainstream E2E imitation learning approaches. In this work, we propose ReasonPlan, a novel MLLM fine-tuning framework designed for closed-loop driving through holistic reasoning with a self-supervised Next Scene Prediction task and supervised Decision Chain-of-Thought process. This dual mechanism encourages the model to align visual representations with actionable driving context, while promoting interpretable and causally grounded decision making. We curate a planning-oriented decision reasoning dataset, namely PDR, comprising 210k diverse and high-quality samples. Our method outperforms the mainstream E2E imitation learning method by a large margin of 19% L2 and 16.1 driving score on Bench2Drive benchmark. Furthermore, ReasonPlan demonstrates strong zero-shot generalization on unseen DOS benchmark, highlighting its adaptability in handling zero-shot corner cases. Code and dataset will be found in https://github.com/Liuxueyi/ReasonPlan.
UncAD: Towards Safe End-to-end Autonomous Driving via Online Map Uncertainty
Apr 17, 2025End-to-end autonomous driving aims to produce planning trajectories from raw sensors directly. Currently, most approaches integrate perception, prediction, and planning modules into a fully differentiable network, promising great scalability. However, these methods typically rely on deterministic modeling of online maps in the perception module for guiding or constraining vehicle planning, which may incorporate erroneous perception information and further compromise planning safety. To address this issue, we delve into the importance of online map uncertainty for enhancing autonomous driving safety and propose a novel paradigm named UncAD. Specifically, UncAD first estimates the uncertainty of the online map in the perception module. It then leverages the uncertainty to guide motion prediction and planning modules to produce multi-modal trajectories. Finally, to achieve safer autonomous driving, UncAD proposes an uncertainty-collision-aware planning selection strategy according to the online map uncertainty to evaluate and select the best trajectory. In this study, we incorporate UncAD into various state-of-the-art (SOTA) end-to-end methods. Experiments on the nuScenes dataset show that integrating UncAD, with only a 1.9% increase in parameters, can reduce collision rates by up to 26% and drivable area conflict rate by up to 42%. Codes, pre-trained models, and demo videos can be accessed at https://github.com/pengxuanyang/UncAD.
Symmetrical Gaussian Error Linear Units (SGELUs)
Nov 10, 2019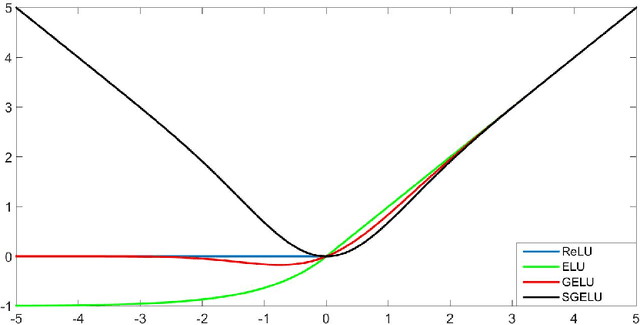
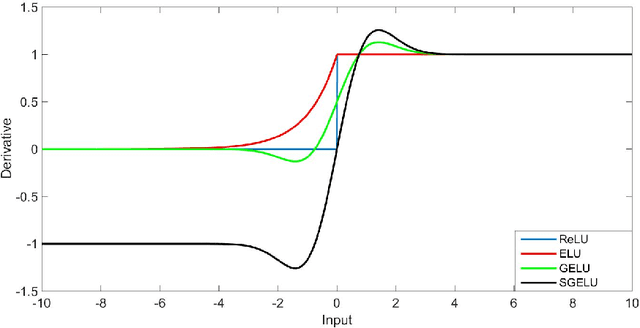
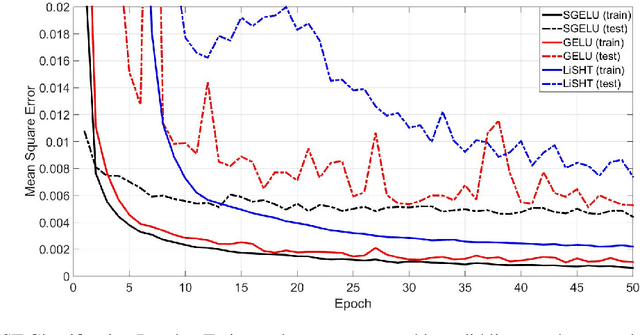
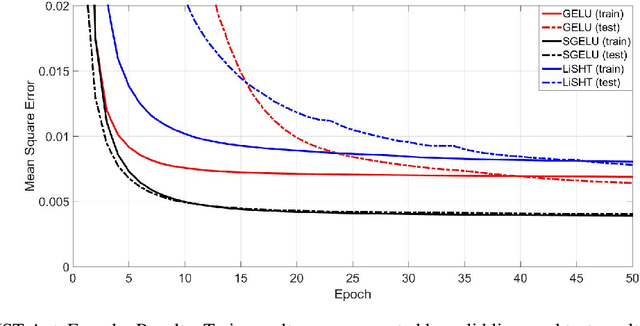
In this paper, a novel neural network activation function, called Symmetrical Gaussian Error Linear Unit (SGELU), is proposed to obtain high performance. It is achieved by effectively integrating the property of the stochastic regularizer in the Gaussian Error Linear Unit (GELU) with the symmetrical characteristics. Combining with these two merits, the proposed unit introduces the capability of the bidirection convergence to successfully optimize the network without the gradient diminishing problem. The evaluations of SGELU against GELU and Linearly Scaled Hyperbolic Tangent (LiSHT) have been carried out on MNIST classification and MNIST auto-encoder, which provide great validations in terms of the performance, the convergence rate among these applications.