 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Predictability of Reinforcement Learning Dynamics for Large Language Models
Oct 02, 2025Recent advances in reasoning capabilities of large language models (LLMs) are largely driven by reinforcement learning (RL), yet the underlying parameter dynamics during RL training remain poorly understood. This work identifies two fundamental properties of RL-induced parameter updates in LLMs: (1) Rank-1 Dominance, where the top singular subspace of the parameter update matrix nearly fully determines reasoning improvements, recovering over 99\% of performance gains; and (2) Rank-1 Linear Dynamics, where this dominant subspace evolves linearly throughout training, enabling accurate prediction from early checkpoints. Extensive experiments across 8 LLMs and 7 algorithms validate the generalizability of these properties. More importantly, based on these findings, we propose AlphaRL, a plug-in acceleration framework that extrapolates the final parameter update using a short early training window, achieving up to 2.5 speedup while retaining \textgreater 96\% of reasoning performance without extra modules or hyperparameter tuning. This positions our finding as a versatile and practical tool for large-scale RL, opening a path toward principled, interpretable, and efficient training paradigm for LLMs.
Learning to Walk in the Real World with Minimal Human Effort
Feb 27, 2020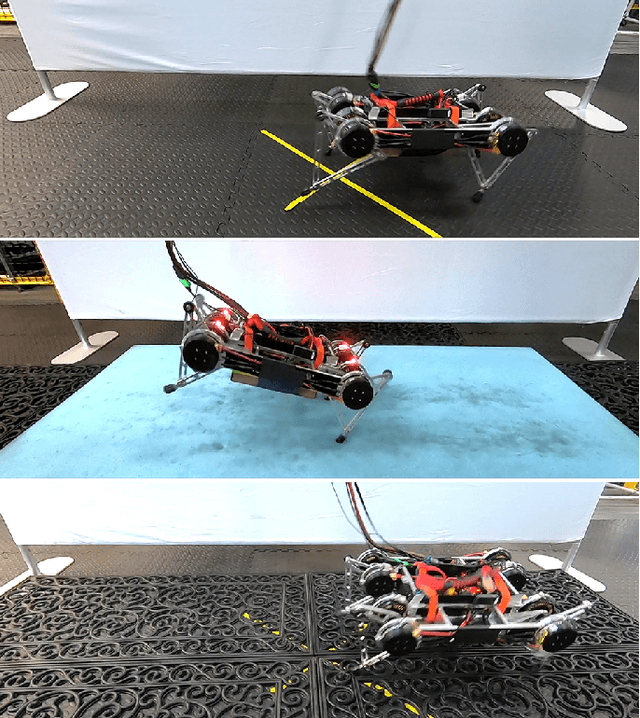
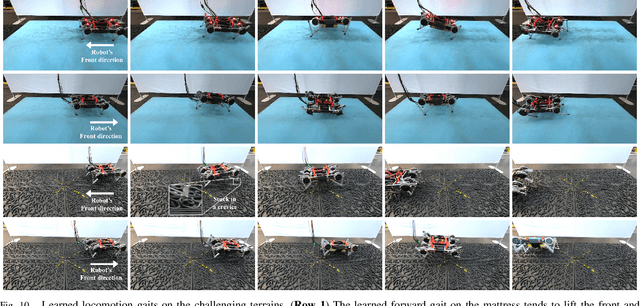
Reliable and stable locomotion has been one of the most fundamental challenges for legged robots. Deep reinforcement learning (deep RL) has emerged as a promising method for developing such control policies autonomously. In this paper, we develop a system for learning legged locomotion policies with deep RL in the real world with minimal human effort. The key difficulties for on-robot learning systems are automatic data collection and safety. We overcome these two challenges by developing a multi-task learning procedure, an automatic reset controller, and a safety-constrained RL framework. We tested our system on the task of learning to walk on three different terrains: flat ground, a soft mattress, and a doormat with crevices. Our system can automatically and efficiently learn locomotion skills on a Minitaur robot with little human intervention.
The Tree Ensemble Layer: Differentiability meets Conditional Computation
Feb 18, 2020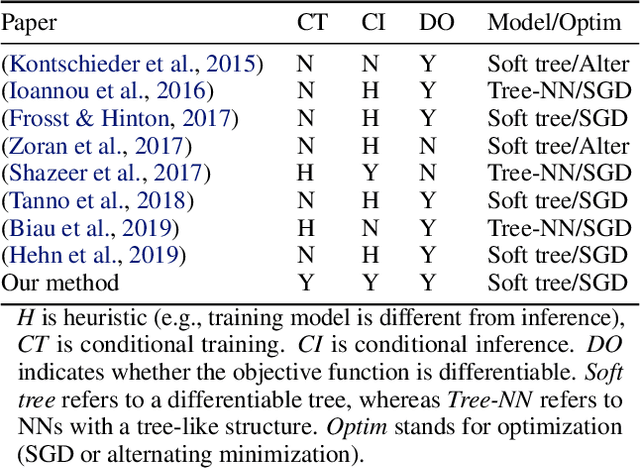
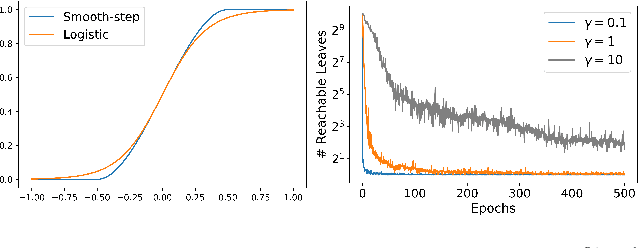
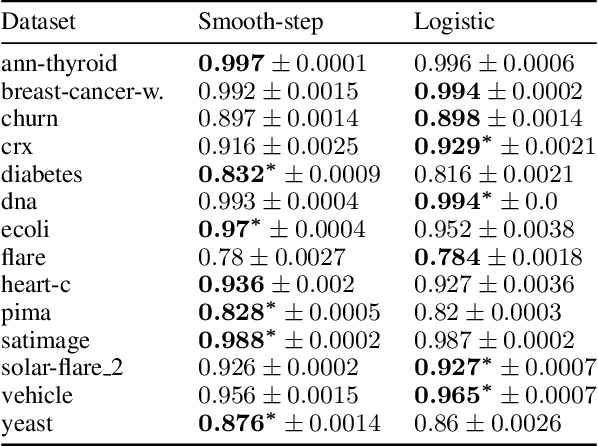
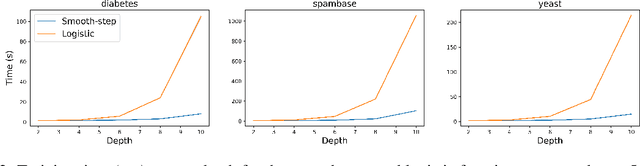
Neural networks and tree ensembles are state-of-the-art learners, each with its unique statistical and computational advantages. We aim to combine these advantages by introducing a new layer for neural networks, composed of an ensemble of differentiable decision trees (a.k.a. soft trees). While differentiable trees demonstrate promising results in the literature, in practice they are typically slow in training and inference as they do not support conditional computation. We mitigate this issue by introducing a new sparse activation function for sample routing, and implement true conditional computation by developing specialized forward and backward propagation algorithms that exploit sparsity. Our efficient algorithms pave the way for jointly training over deep and wide tree ensembles using first-order methods (e.g., SGD). Experiments on 23 classification datasets indicate over 10x speed-ups compared to the differentiable trees used in the literature and over 20x reduction in the number of parameters compared to gradient boosted trees, while maintaining competitive performance. Moreover, experiments on CIFAR, MNIST, and Fashion MNIST indicate that replacing dense layers in CNNs with our tree layer reduces the test loss by 7-53% and the number of parameters by 8x. We provide an open-source TensorFlow implementation with a Keras API.