 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupport Before Frequency in Discrete Diffusion
May 13, 2026Discrete diffusion models are increasingly competitive for language modeling, yet it remains unclear how their denoising objectives organize learning. Although these objectives target the full data distribution, we show that the exact reverse process induces a hierarchy between coarse support information and finer frequency information. For uniform and absorbing (a.k.a. masking) diffusion, we prove that, in the small-noise regime of the final denoising steps, each single-token reverse edit decomposes into a leading scale, determined by whether it moves toward the data support (e.g., grammatically valid sentences), and a finer coefficient, determining relative probabilities within the same scale. Thus, recovering validity structure only requires learning the correct order of magnitude of reverse probabilities, whereas recovering data frequencies requires coefficient-level estimation. The separation is mechanism-dependent: uniform diffusion exhibits a trichotomy into validity-improving, validity-preserving, and validity-worsening edits, while absorbing diffusion places its leading-order mass on validity-improving moves. Experiments on a masked language diffusion model and synthetic regular-language tasks support these predictions: support-localization emerges earlier than within-support frequency ranking, and the contrast between uniform and absorbing diffusion matches the predicted rate separation. Together, our results suggest that discrete diffusion models learn data support before data frequencies.
Select-then-differentiate: Solving Bilevel Optimization with Manifold Lower-level Solution Sets
May 09, 2026We study optimistic bilevel optimization when the lower-level problem has a non-isolated manifold of minimizers. In this setting, the hyper-objective may be non-differentiable because the upper-level criterion must choose among multiple lower-level solutions. Under a local Polyak--Łojasiewicz (PŁ) condition, we show that differentiability does not require the lower-level solution set to be a singleton: uniqueness of the optimistic selection is sufficient. This yields an explicit pseudoinverse-based hyper-gradient formula extending the classical singleton-minimizer result. We further characterize the regularity of the hyper-objective: non-degeneracy of the selected minimizer along the solution manifold yields local smoothness, while failure of uniqueness can create many non-differentiable points and failure of non-degeneracy can destroy all positive Hölder regularity of the hyper-gradient. Motivated by this theory, we propose HG-MS, a select-then-differentiate method combining explicit optimistic selection with efficient pseudoinverse-based hyper-gradient computation. Despite the nonconvex nature of optimistic selection over the lower-level solution manifold, we show that HG-MS converges to a stationary point of the optimistic objective with complexity governed by the intrinsic dimension of the solution manifold rather than its ambient dimension. Empirically, we test a practical variant of HG-MS for matched-budget LLM source reweighting. This variant preserves the select-then-differentiate principle and obtains the best GSM8K/MATH scores across the tested backbones, along with competitive or best MT-Bench instruction-following results.
A Schrödinger Eigenfunction Method for Long-Horizon Stochastic Optimal Control
Mar 24, 2026High-dimensional stochastic optimal control (SOC) becomes harder with longer planning horizons: existing methods scale linearly in the horizon $T$, with performance often deteriorating exponentially. We overcome these limitations for a subclass of linearly-solvable SOC problems-those whose uncontrolled drift is the gradient of a potential. In this setting, the Hamilton-Jacobi-Bellman equation reduces to a linear PDE governed by an operator $\mathcal{L}$. We prove that, under the gradient drift assumption, $\mathcal{L}$ is unitarily equivalent to a Schrödinger operator $\mathcal{S} = -Δ+ \mathcal{V}$ with purely discrete spectrum, allowing the long-horizon control to be efficiently described via the eigensystem of $\mathcal{L}$. This connection provides two key results: first, for a symmetric linear-quadratic regulator (LQR), $\mathcal{S}$ matches the Hamiltonian of a quantum harmonic oscillator, whose closed-form eigensystem yields an analytic solution to the symmetric LQR with \emph{arbitrary} terminal cost. Second, in a more general setting, we learn the eigensystem of $\mathcal{L}$ using neural networks. We identify implicit reweighting issues with existing eigenfunction learning losses that degrade performance in control tasks, and propose a novel loss function to mitigate this. We evaluate our method on several long-horizon benchmarks, achieving an order-of-magnitude improvement in control accuracy compared to state-of-the-art methods, while reducing memory usage and runtime complexity from $\mathcal{O}(Td)$ to $\mathcal{O}(d)$.
Manifold Generalization Provably Proceeds Memorization in Diffusion Models
Mar 24, 2026Diffusion models often generate novel samples even when the learned score is only \emph{coarse} -- a phenomenon not accounted for by the standard view of diffusion training as density estimation. In this paper, we show that, under the \emph{manifold hypothesis}, this behavior can instead be explained by coarse scores capturing the \emph{geometry} of the data while discarding the fine-scale distributional structure of the population measure~$μ_{\scriptscriptstyle\mathrm{data}}$. Concretely, whereas estimating the full data distribution $μ_{\scriptscriptstyle\mathrm{data}}$ supported on a $k$-dimensional manifold is known to require the classical minimax rate $\tilde{\mathcal{O}}(N^{-1/k})$, we prove that diffusion models trained with coarse scores can exploit the \emph{regularity of the manifold support} and attain a near-parametric rate toward a \emph{different} target distribution. This target distribution has density uniformly comparable to that of~$μ_{\scriptscriptstyle\mathrm{data}}$ throughout any $\tilde{\mathcal{O}}\bigl(N^{-β/(4k)}\bigr)$-neighborhood of the manifold, where $β$ denotes the manifold regularity. Our guarantees therefore depend only on the smoothness of the underlying support, and are especially favorable when the data density itself is irregular, for instance non-differentiable. In particular, when the manifold is sufficiently smooth, we obtain that \emph{generalization} -- formalized as the ability to generate novel, high-fidelity samples -- occurs at a statistical rate strictly faster than that required to estimate the full population distribution~$μ_{\scriptscriptstyle\mathrm{data}}$.
Scalable Neural Incentive Design with Parameterized Mean-Field Approximation
Oct 24, 2025



Designing incentives for a multi-agent system to induce a desirable Nash equilibrium is both a crucial and challenging problem appearing in many decision-making domains, especially for a large number of agents $N$. Under the exchangeability assumption, we formalize this incentive design (ID) problem as a parameterized mean-field game (PMFG), aiming to reduce complexity via an infinite-population limit. We first show that when dynamics and rewards are Lipschitz, the finite-$N$ ID objective is approximated by the PMFG at rate $\mathscr{O}(\frac{1}{\sqrt{N}})$. Moreover, beyond the Lipschitz-continuous setting, we prove the same $\mathscr{O}(\frac{1}{\sqrt{N}})$ decay for the important special case of sequential auctions, despite discontinuities in dynamics, through a tailored auction-specific analysis. Built on our novel approximation results, we further introduce our Adjoint Mean-Field Incentive Design (AMID) algorithm, which uses explicit differentiation of iterated equilibrium operators to compute gradients efficiently. By uniting approximation bounds with optimization guarantees, AMID delivers a powerful, scalable algorithmic tool for many-agent (large $N$) ID. Across diverse auction settings, the proposed AMID method substantially increases revenue over first-price formats and outperforms existing benchmark methods.
Provable Maximum Entropy Manifold Exploration via Diffusion Models
Jun 18, 2025
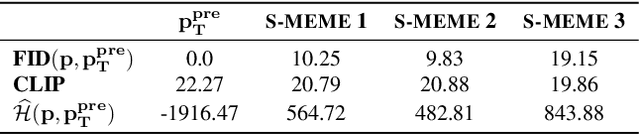
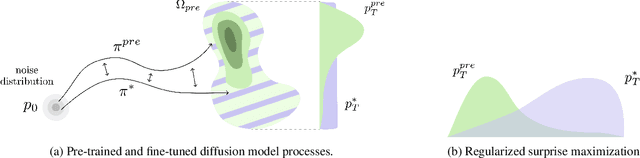
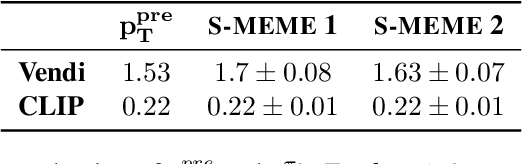
Exploration is critical for solving real-world decision-making problems such as scientific discovery, where the objective is to generate truly novel designs rather than mimic existing data distributions. In this work, we address the challenge of leveraging the representational power of generative models for exploration without relying on explicit uncertainty quantification. We introduce a novel framework that casts exploration as entropy maximization over the approximate data manifold implicitly defined by a pre-trained diffusion model. Then, we present a novel principle for exploration based on density estimation, a problem well-known to be challenging in practice. To overcome this issue and render this method truly scalable, we leverage a fundamental connection between the entropy of the density induced by a diffusion model and its score function. Building on this, we develop an algorithm based on mirror descent that solves the exploration problem as sequential fine-tuning of a pre-trained diffusion model. We prove its convergence to the optimal exploratory diffusion model under realistic assumptions by leveraging recent understanding of mirror flows. Finally, we empirically evaluate our approach on both synthetic and high-dimensional text-to-image diffusion, demonstrating promising results.
Poincaré Inequality for Local Log-Polyak-Lojasiewicz Measures : Non-asymptotic Analysis in Low-temperature Regime
Feb 12, 2025Potential functions in highly pertinent applications, such as deep learning in over-parameterized regime, are empirically observed to admit non-isolated minima. To understand the convergence behavior of stochastic dynamics in such landscapes, we propose to study the class of \logPLmeasure\ measures $\mu_\epsilon \propto \exp(-V/\epsilon)$, where the potential $V$ satisfies a local Polyak-{\L}ojasiewicz (P\L) inequality, and its set of local minima is provably \emph{connected}. Notably, potentials in this class can exhibit local maxima and we characterize its optimal set S to be a compact $\mathcal{C}^2$ \emph{embedding submanifold} of $\mathbb{R}^d$ without boundary. The \emph{non-contractibility} of S distinguishes our function class from the classical convex setting topologically. Moreover, the embedding structure induces a naturally defined Laplacian-Beltrami operator on S, and we show that its first non-trivial eigenvalue provides an \emph{$\epsilon$-independent} lower bound for the \Poincare\ constant in the \Poincare\ inequality of $\mu_\epsilon$. As a direct consequence, Langevin dynamics with such non-convex potential $V$ and diffusion coefficient $\epsilon$ converges to its equilibrium $\mu_\epsilon$ at a rate of $\tilde{\mathcal{O}}(1/\epsilon)$, provided $\epsilon$ is sufficiently small. Here $\tilde{\mathcal{O}}$ hides logarithmic terms.
Learning to Steer Markovian Agents under Model Uncertainty
Jul 14, 2024Designing incentives for an adapting population is a ubiquitous problem in a wide array of economic applications and beyond. In this work, we study how to design additional rewards to steer multi-agent systems towards desired policies \emph{without} prior knowledge of the agents' underlying learning dynamics. We introduce a model-based non-episodic Reinforcement Learning (RL) formulation for our steering problem. Importantly, we focus on learning a \emph{history-dependent} steering strategy to handle the inherent model uncertainty about the agents' learning dynamics. We introduce a novel objective function to encode the desiderata of achieving a good steering outcome with reasonable cost. Theoretically, we identify conditions for the existence of steering strategies to guide agents to the desired policies. Complementing our theoretical contributions, we provide empirical algorithms to approximately solve our objective, which effectively tackles the challenge in learning history-dependent strategies. We demonstrate the efficacy of our algorithms through empirical evaluations.
A Hessian-Aware Stochastic Differential Equation for Modelling SGD
May 28, 2024Continuous-time approximation of Stochastic Gradient Descent (SGD) is a crucial tool to study its escaping behaviors from stationary points. However, existing stochastic differential equation (SDE) models fail to fully capture these behaviors, even for simple quadratic objectives. Built on a novel stochastic backward error analysis framework, we derive the Hessian-Aware Stochastic Modified Equation (HA-SME), an SDE that incorporates Hessian information of the objective function into both its drift and diffusion terms. Our analysis shows that HA-SME matches the order-best approximation error guarantee among existing SDE models in the literature, while achieving a significantly reduced dependence on the smoothness parameter of the objective. Further, for quadratic objectives, under mild conditions, HA-SME is proved to be the first SDE model that recovers exactly the SGD dynamics in the distributional sense. Consequently, when the local landscape near a stationary point can be approximated by quadratics, HA-SME is expected to accurately predict the local escaping behaviors of SGD.
Share Your Representation Only: Guaranteed Improvement of the Privacy-Utility Tradeoff in Federated Learning
Sep 11, 2023



Repeated parameter sharing in federated learning causes significant information leakage about private data, thus defeating its main purpose: data privacy. Mitigating the risk of this information leakage, using state of the art differentially private algorithms, also does not come for free. Randomized mechanisms can prevent convergence of models on learning even the useful representation functions, especially if there is more disagreement between local models on the classification functions (due to data heterogeneity). In this paper, we consider a representation federated learning objective that encourages various parties to collaboratively refine the consensus part of the model, with differential privacy guarantees, while separately allowing sufficient freedom for local personalization (without releasing it). We prove that in the linear representation setting, while the objective is non-convex, our proposed new algorithm \DPFEDREP\ converges to a ball centered around the \emph{global optimal} solution at a linear rate, and the radius of the ball is proportional to the reciprocal of the privacy budget. With this novel utility analysis, we improve the SOTA utility-privacy trade-off for this problem by a factor of $\sqrt{d}$, where $d$ is the input dimension. We empirically evaluate our method with the image classification task on CIFAR10, CIFAR100, and EMNIST, and observe a significant performance improvement over the prior work under the same small privacy budget. The code can be found in this link: https://github.com/shenzebang/CENTAUR-Privacy-Federated-Representation-Learning.