 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHT-Bench: Benchmarking and Learning Dexterous Full-Hand Tactile Representations with Egocentric Vision
Jun 17, 2026Establishing a universal benchmark for tactile representation learning in robotic manipulation remains challenging due to the diversity of tactile sensor designs, data formats, and robot embodiments. Rather than seeking to establish such, we explore a scalable and promising direction for future development: egocentric vision paired with full-hand tactile data. To this end, we introduce \textbf{HT-Bench}, a large-scale multi-task benchmark for dexterous full-hand tactile sensing, comprising 10M RGB frames and 7.8M tactile frames collected across 226 tasks. HT-Bench evaluates tactile representations from three key perspectives: whether they encode meaningful contact geometry, whether they can align tactile observations with visual information, and whether they generalize to unseen tasks. To assess these capabilities, HT-Bench includes four tasks: fine-grained tactile similarity retrieval, masked tactile inpainting, vision-to-tactile synthesis, and multimodal tactile frame prediction. We further propose \textbf{HandTouch}, a vector-quantized vision--tactile encoder that learns tactile representations through progressive spatial, cross-modal, and temporal training. Across HT-Bench, HandTouch consistently outperforms representative tactile encoder baselines, improving Recall@5 on fine-grained tactile similarity retrieval from 74.65\% to 85.23\%, reducing RMSE on masked tactile inpainting from 0.022 to 0.010, and increasing OOD cIoU on vision-to-tactile synthesis from 0.628 to 0.705. These results demonstrate the effectiveness of HandTouch and suggest that large-scale egocentric full-hand tactile data provides a scalable basis for evaluating and advancing tactile representation learning in dexterous manipulation.
Attention-Guided Reward for Reinforcement Learning-based Jailbreak against Large Reasoning Models
May 19, 2026Large Reasoning Models (LRMs) have demonstrated remarkable capabilities in solving complex problems by generating structured, step-by-step reasoning content. However, exposing a model's internal reasoning process introduces additional safety risks; for example, recent studies show that LRMs are more vulnerable to jailbreak attacks than standard LLMs. In this paper, we investigate jailbreak attacks on LRMs and reveal that the attack success rate (ASR) is closely correlated with LRMs' attention patterns. Specifically, successful jailbreaks tend to assign lower attention to harmful tokens in the input prompt, while allocating higher attention to those tokens in the reasoning content. Motivated by this finding, we propose a novel jailbreak method for LRMs that leverages reinforcement learning (RL) to enhance attack effectiveness, explicitly incorporating attention signals into the reward function design. In addition, we introduce diverse persuasion strategies to enrich the RL action space, which consistently improves the ASR. Extensive experiments on five open-source and closed-source LRMs across three benchmarks demonstrate that our method achieves substantially higher ASR, outperforming existing approaches in terms of effectiveness, efficiency, and transferability.
Re-Triggering Safeguards within LLMs for Jailbreak Detection
May 11, 2026This paper proposes a jailbreaking prompt detection method for large language models (LLMs) to defend against jailbreak attacks. Although recent LLMs are equipped with built-in safeguards, it remains possible to craft jailbreaking prompts that bypass them. We argue that such jailbreaking prompts are inherently fragile, and thus introduce an embedding disruption method to re-activate the safeguards within LLMs. Unlike previous defense methods that aim to serve as standalone solutions, our approach instead cooperates with the LLM's internal defense mechanisms by re-triggering them. Moreover, through extensive analysis, we gain a comprehensive understanding of the disruption effects and develop an efficient search algorithm to identify appropriate disruptions for effective jailbreak detection. Extensive experiments demonstrate that our approach effectively defends against state-of-the-art jailbreak attacks in white-box and black-box settings, and remains robust even against adaptive attacks.
From Assistant to Double Agent: Formalizing and Benchmarking Attacks on OpenClaw for Personalized Local AI Agent
Feb 09, 2026Although large language model (LLM)-based agents, exemplified by OpenClaw, are increasingly evolving from task-oriented systems into personalized AI assistants for solving complex real-world tasks, their practical deployment also introduces severe security risks. However, existing agent security research and evaluation frameworks primarily focus on synthetic or task-centric settings, and thus fail to accurately capture the attack surface and risk propagation mechanisms of personalized agents in real-world deployments. To address this gap, we propose Personalized Agent Security Bench (PASB), an end-to-end security evaluation framework tailored for real-world personalized agents. Building upon existing agent attack paradigms, PASB incorporates personalized usage scenarios, realistic toolchains, and long-horizon interactions, enabling black-box, end-to-end security evaluation on real systems. Using OpenClaw as a representative case study, we systematically evaluate its security across multiple personalized scenarios, tool capabilities, and attack types. Our results indicate that OpenClaw exhibits critical vulnerabilities at different execution stages, including user prompt processing, tool usage, and memory retrieval, highlighting substantial security risks in personalized agent deployments. The code for the proposed PASB framework is available at https://github.com/AstorYH/PASB.
TaF-VLA: Tactile-Force Alignment in Vision-Language-Action Models for Force-aware Manipulation
Jan 30, 2026Vision-Language-Action (VLA) models have recently emerged as powerful generalists for robotic manipulation. However, due to their predominant reliance on visual modalities, they fundamentally lack the physical intuition required for contact-rich tasks that require precise force regulation and physical reasoning. Existing attempts to incorporate vision-based tactile sensing into VLA models typically treat tactile inputs as auxiliary visual textures, thereby overlooking the underlying correlation between surface deformation and interaction dynamics. To bridge this gap, we propose a paradigm shift from tactile-vision alignment to tactile-force alignment. Here, we introduce TaF-VLA, a framework that explicitly grounds high-dimensional tactile observations in physical interaction forces. To facilitate this, we develop an automated tactile-force data acquisition device and curate the TaF-Dataset, comprising over 10 million synchronized tactile observations, 6-axis force/torque, and matrix force map. To align sequential tactile observations with interaction forces, the central component of our approach is the Tactile-Force Adapter (TaF-Adapter), a tactile sensor encoder that extracts discretized latent information for encoding tactile observations. This mechanism ensures that the learned representations capture history-dependent, noise-insensitive physical dynamics rather than static visual textures. Finally, we integrate this force-aligned encoder into a VLA backbone. Extensive real-world experiments demonstrate that TaF-VLA policy significantly outperforms state-of-the-art tactile-vision-aligned and vision-only baselines on contact-rich tasks, verifying its ability to achieve robust, force-aware manipulation through cross-modal physical reasoning.
Tactile-Force Alignment in Vision-Language-Action Models for Force-aware Manipulation
Jan 28, 2026Vision-Language-Action (VLA) models have recently emerged as powerful generalists for robotic manipulation. However, due to their predominant reliance on visual modalities, they fundamentally lack the physical intuition required for contact-rich tasks that require precise force regulation and physical reasoning. Existing attempts to incorporate vision-based tactile sensing into VLA models typically treat tactile inputs as auxiliary visual textures, thereby overlooking the underlying correlation between surface deformation and interaction dynamics. To bridge this gap, we propose a paradigm shift from tactile-vision alignment to tactile-force alignment. Here, we introduce TaF-VLA, a framework that explicitly grounds high-dimensional tactile observations in physical interaction forces. To facilitate this, we develop an automated tactile-force data acquisition device and curate the TaF-Dataset, comprising over 10 million synchronized tactile observations, 6-axis force/torque, and matrix force map. To align sequential tactile observations with interaction forces, the central component of our approach is the Tactile-Force Adapter (TaF-Adapter), a tactile sensor encoder that extracts discretized latent information for encoding tactile observations. This mechanism ensures that the learned representations capture history-dependent, noise-insensitive physical dynamics rather than static visual textures. Finally, we integrate this force-aligned encoder into a VLA backbone. Extensive real-world experiments demonstrate that TaF-VLA policy significantly outperforms state-of-the-art tactile-vision-aligned and vision-only baselines on contact-rich tasks, verifying its ability to achieve robust, force-aware manipulation through cross-modal physical reasoning.
PP-Tac: Paper Picking Using Tactile Feedback in Dexterous Robotic Hands
Apr 23, 2025



Robots are increasingly envisioned as human companions, assisting with everyday tasks that often involve manipulating deformable objects. Although recent advances in robotic hardware and embodied AI have expanded their capabilities, current systems still struggle with handling thin, flat, and deformable objects such as paper and fabric. This limitation arises from the lack of suitable perception techniques for robust state estimation under diverse object appearances, as well as the absence of planning techniques for generating appropriate grasp motions. To bridge these gaps, this paper introduces PP-Tac, a robotic system for picking up paper-like objects. PP-Tac features a multi-fingered robotic hand with high-resolution omnidirectional tactile sensors \sensorname. This hardware configuration enables real-time slip detection and online frictional force control that mitigates such slips. Furthermore, grasp motion generation is achieved through a trajectory synthesis pipeline, which first constructs a dataset of finger's pinching motions. Based on this dataset, a diffusion-based policy is trained to control the hand-arm robotic system. Experiments demonstrate that PP-Tac can effectively grasp paper-like objects of varying material, thickness, and stiffness, achieving an overall success rate of 87.5\%. To our knowledge, this work is the first attempt to grasp paper-like deformable objects using a tactile dexterous hand. Our project webpage can be found at: https://peilin-666.github.io/projects/PP-Tac/
Application of Machine Learning in Wireless Networks: Key Techniques and Open Issues
Sep 24, 2018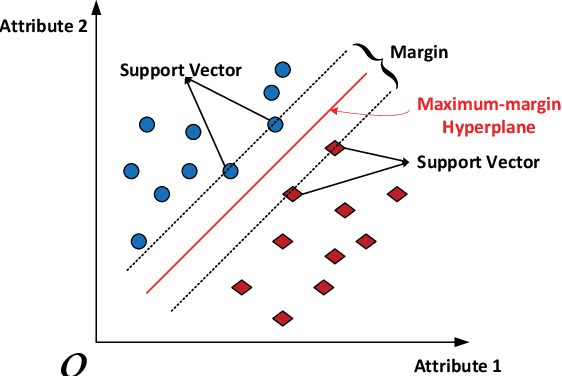
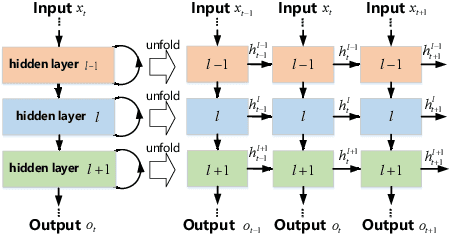
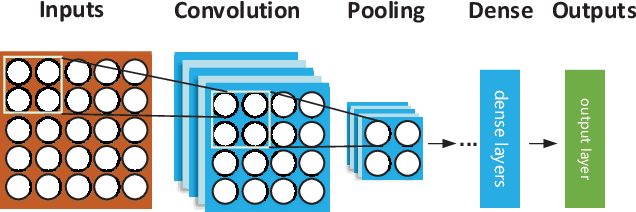
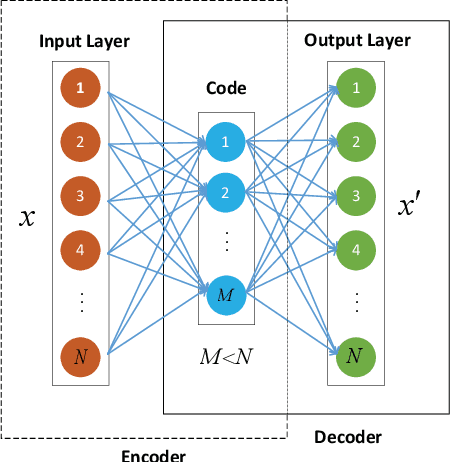
As a key technique for enabling artificial intelligence, machine learning (ML) has been shown to be capable of solving complex problems without explicit programming. Motivated by its successful applications to many practical tasks like image recognition and recommendation systems, both industry and the research community have advocated the applications of ML in wireless communication. This paper comprehensively surveys the recent advances of the applications of ML in wireless communication, which are classified as: resource management in the MAC layer, networking and mobility management in the network layer, and localization in the application layer. The applications in resource management further include power control, spectrum management, backhaul management, cache management, beamformer design, and computation resource management, while ML-based networking focuses on the applications in base station (BS) clustering, BS switching control, user association, and routing. Each aspect is further categorized according to the adopted ML techniques. Additionally, given the extensiveness of the research area, challenges and unresolved issues are presented to facilitate future studies, where the topics of ML-based network slicing, infrastructure update to support ML-based paradigms, open data sets and platforms for researchers, theoretical guidance for ML implementation, and so on are discussed.