 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHT-Bench: Benchmarking and Learning Dexterous Full-Hand Tactile Representations with Egocentric Vision
Jun 17, 2026Establishing a universal benchmark for tactile representation learning in robotic manipulation remains challenging due to the diversity of tactile sensor designs, data formats, and robot embodiments. Rather than seeking to establish such, we explore a scalable and promising direction for future development: egocentric vision paired with full-hand tactile data. To this end, we introduce \textbf{HT-Bench}, a large-scale multi-task benchmark for dexterous full-hand tactile sensing, comprising 10M RGB frames and 7.8M tactile frames collected across 226 tasks. HT-Bench evaluates tactile representations from three key perspectives: whether they encode meaningful contact geometry, whether they can align tactile observations with visual information, and whether they generalize to unseen tasks. To assess these capabilities, HT-Bench includes four tasks: fine-grained tactile similarity retrieval, masked tactile inpainting, vision-to-tactile synthesis, and multimodal tactile frame prediction. We further propose \textbf{HandTouch}, a vector-quantized vision--tactile encoder that learns tactile representations through progressive spatial, cross-modal, and temporal training. Across HT-Bench, HandTouch consistently outperforms representative tactile encoder baselines, improving Recall@5 on fine-grained tactile similarity retrieval from 74.65\% to 85.23\%, reducing RMSE on masked tactile inpainting from 0.022 to 0.010, and increasing OOD cIoU on vision-to-tactile synthesis from 0.628 to 0.705. These results demonstrate the effectiveness of HandTouch and suggest that large-scale egocentric full-hand tactile data provides a scalable basis for evaluating and advancing tactile representation learning in dexterous manipulation.
TaF-VLA: Tactile-Force Alignment in Vision-Language-Action Models for Force-aware Manipulation
Jan 30, 2026Vision-Language-Action (VLA) models have recently emerged as powerful generalists for robotic manipulation. However, due to their predominant reliance on visual modalities, they fundamentally lack the physical intuition required for contact-rich tasks that require precise force regulation and physical reasoning. Existing attempts to incorporate vision-based tactile sensing into VLA models typically treat tactile inputs as auxiliary visual textures, thereby overlooking the underlying correlation between surface deformation and interaction dynamics. To bridge this gap, we propose a paradigm shift from tactile-vision alignment to tactile-force alignment. Here, we introduce TaF-VLA, a framework that explicitly grounds high-dimensional tactile observations in physical interaction forces. To facilitate this, we develop an automated tactile-force data acquisition device and curate the TaF-Dataset, comprising over 10 million synchronized tactile observations, 6-axis force/torque, and matrix force map. To align sequential tactile observations with interaction forces, the central component of our approach is the Tactile-Force Adapter (TaF-Adapter), a tactile sensor encoder that extracts discretized latent information for encoding tactile observations. This mechanism ensures that the learned representations capture history-dependent, noise-insensitive physical dynamics rather than static visual textures. Finally, we integrate this force-aligned encoder into a VLA backbone. Extensive real-world experiments demonstrate that TaF-VLA policy significantly outperforms state-of-the-art tactile-vision-aligned and vision-only baselines on contact-rich tasks, verifying its ability to achieve robust, force-aware manipulation through cross-modal physical reasoning.
Tactile-Force Alignment in Vision-Language-Action Models for Force-aware Manipulation
Jan 28, 2026Vision-Language-Action (VLA) models have recently emerged as powerful generalists for robotic manipulation. However, due to their predominant reliance on visual modalities, they fundamentally lack the physical intuition required for contact-rich tasks that require precise force regulation and physical reasoning. Existing attempts to incorporate vision-based tactile sensing into VLA models typically treat tactile inputs as auxiliary visual textures, thereby overlooking the underlying correlation between surface deformation and interaction dynamics. To bridge this gap, we propose a paradigm shift from tactile-vision alignment to tactile-force alignment. Here, we introduce TaF-VLA, a framework that explicitly grounds high-dimensional tactile observations in physical interaction forces. To facilitate this, we develop an automated tactile-force data acquisition device and curate the TaF-Dataset, comprising over 10 million synchronized tactile observations, 6-axis force/torque, and matrix force map. To align sequential tactile observations with interaction forces, the central component of our approach is the Tactile-Force Adapter (TaF-Adapter), a tactile sensor encoder that extracts discretized latent information for encoding tactile observations. This mechanism ensures that the learned representations capture history-dependent, noise-insensitive physical dynamics rather than static visual textures. Finally, we integrate this force-aligned encoder into a VLA backbone. Extensive real-world experiments demonstrate that TaF-VLA policy significantly outperforms state-of-the-art tactile-vision-aligned and vision-only baselines on contact-rich tasks, verifying its ability to achieve robust, force-aware manipulation through cross-modal physical reasoning.
Apertus: Democratizing Open and Compliant LLMs for Global Language Environments
Sep 17, 2025
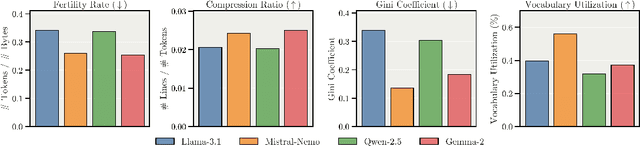

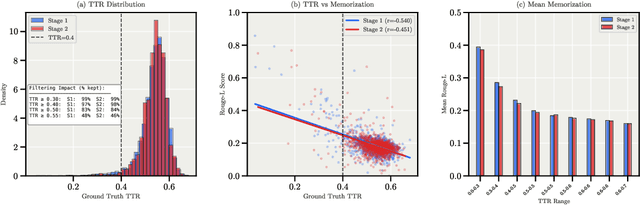
We present Apertus, a fully open suite of large language models (LLMs) designed to address two systemic shortcomings in today's open model ecosystem: data compliance and multilingual representation. Unlike many prior models that release weights without reproducible data pipelines or regard for content-owner rights, Apertus models are pretrained exclusively on openly available data, retroactively respecting robots.txt exclusions and filtering for non-permissive, toxic, and personally identifiable content. To mitigate risks of memorization, we adopt the Goldfish objective during pretraining, strongly suppressing verbatim recall of data while retaining downstream task performance. The Apertus models also expand multilingual coverage, training on 15T tokens from over 1800 languages, with ~40% of pretraining data allocated to non-English content. Released at 8B and 70B scales, Apertus approaches state-of-the-art results among fully open models on multilingual benchmarks, rivalling or surpassing open-weight counterparts. Beyond model weights, we release all scientific artifacts from our development cycle with a permissive license, including data preparation scripts, checkpoints, evaluation suites, and training code, enabling transparent audit and extension.