 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNTIRE 2025 Challenge on Real-World Face Restoration: Methods and Results
Apr 20, 2025This paper provides a review of the NTIRE 2025 challenge on real-world face restoration, highlighting the proposed solutions and the resulting outcomes. The challenge focuses on generating natural, realistic outputs while maintaining identity consistency. Its goal is to advance state-of-the-art solutions for perceptual quality and realism, without imposing constraints on computational resources or training data. The track of the challenge evaluates performance using a weighted image quality assessment (IQA) score and employs the AdaFace model as an identity checker. The competition attracted 141 registrants, with 13 teams submitting valid models, and ultimately, 10 teams achieved a valid score in the final ranking. This collaborative effort advances the performance of real-world face restoration while offering an in-depth overview of the latest trends in the field.
A Real-Time Fusion Framework for Long-term Visual Localization
Oct 18, 2022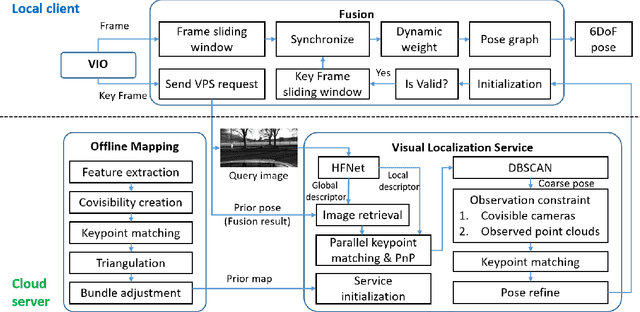
Visual localization is a fundamental task that regresses the 6 Degree Of Freedom (6DoF) poses with image features in order to serve the high precision localization requests in many robotics applications. Degenerate conditions like motion blur, illumination changes and environment variations place great challenges in this task. Fusion with additional information, such as sequential information and Inertial Measurement Unit (IMU) inputs, would greatly assist such problems. In this paper, we present an efficient client-server visual localization architecture that fuses global and local pose estimations to realize promising precision and efficiency. We include additional geometry hints in mapping and global pose regressing modules to improve the measurement quality. A loosely coupled fusion policy is adopted to leverage the computation complexity and accuracy. We conduct the evaluations on two typical open-source benchmarks, 4Seasons and OpenLORIS. Quantitative results prove that our framework has competitive performance with respect to other state-of-the-art visual localization solutions.