 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCauTraj: A Causal-Knowledge-Guided Framework for Lane-Changing Trajectory Planning of Autonomous Vehicles
Dec 21, 2025



Enhancing the performance of trajectory planners for lane - changing vehicles is one of the key challenges in autonomous driving within human - machine mixed traffic. Most existing studies have not incorporated human drivers' prior knowledge when designing trajectory planning models. To address this issue, this study proposes a novel trajectory planning framework that integrates causal prior knowledge into the control process. Both longitudinal and lateral microscopic behaviors of vehicles are modeled to quantify interaction risk, and a staged causal graph is constructed to capture causal dependencies in lane-changing scenarios. Causal effects between the lane-changing vehicle and surrounding vehicles are then estimated using causal inference, including average causal effects (ATE) and conditional average treatment effects (CATE). These causal priors are embedded into a model predictive control (MPC) framework to enhance trajectory planning. The proposed approach is validated on naturalistic vehicle trajectory datasets. Experimental results show that: (1) causal inference provides interpretable and stable quantification of vehicle interactions; (2) individual causal effects reveal driver heterogeneity; and (3) compared with the baseline MPC, the proposed method achieves a closer alignment with human driving behaviors, reducing maximum trajectory deviation from 1.2 m to 0.2 m, lateral velocity fluctuation by 60%, and yaw angle variability by 50%. These findings provide methodological support for human-like trajectory planning and practical value for improving safety, stability, and realism in autonomous vehicle testing and traffic simulation platforms.
PortAgent: LLM-driven Vehicle Dispatching Agent for Port Terminals
Dec 16, 2025



Vehicle Dispatching Systems (VDSs) are critical to the operational efficiency of Automated Container Terminals (ACTs). However, their widespread commercialization is hindered due to their low transferability across diverse terminals. This transferability challenge stems from three limitations: high reliance on port operational specialists, a high demand for terminal-specific data, and time-consuming manual deployment processes. Leveraging the emergence of Large Language Models (LLMs), this paper proposes PortAgent, an LLM-driven vehicle dispatching agent that fully automates the VDS transferring workflow. It bears three features: (1) no need for port operations specialists; (2) low need of data; and (3) fast deployment. Specifically, specialist dependency is eliminated by the Virtual Expert Team (VET). The VET collaborates with four virtual experts, including a Knowledge Retriever, Modeler, Coder, and Debugger, to emulate a human expert team for the VDS transferring workflow. These experts specialize in the domain of terminal VDS via a few-shot example learning approach. Through this approach, the experts are able to learn VDS-domain knowledge from a few VDS examples. These examples are retrieved via a Retrieval-Augmented Generation (RAG) mechanism, mitigating the high demand for terminal-specific data. Furthermore, an automatic VDS design workflow is established among these experts to avoid extra manual interventions. In this workflow, a self-correction loop inspired by the LLM Reflexion framework is created
A Deep Reinforcement Learning Approach for Ramp Metering Based on Traffic Video Data
Dec 09, 2020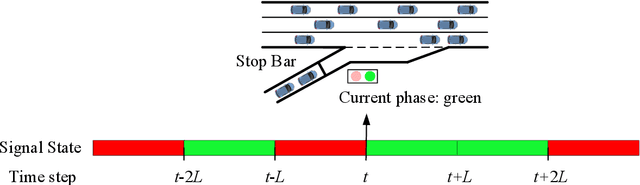
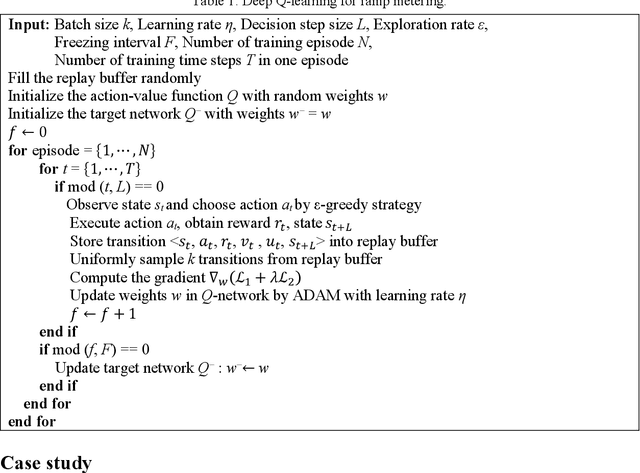
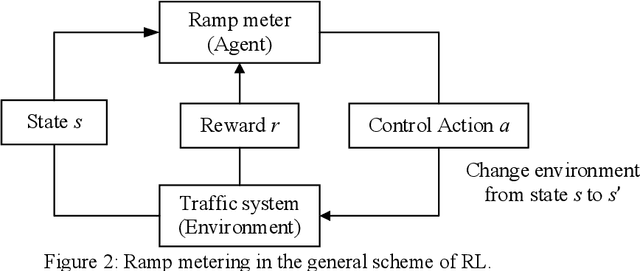
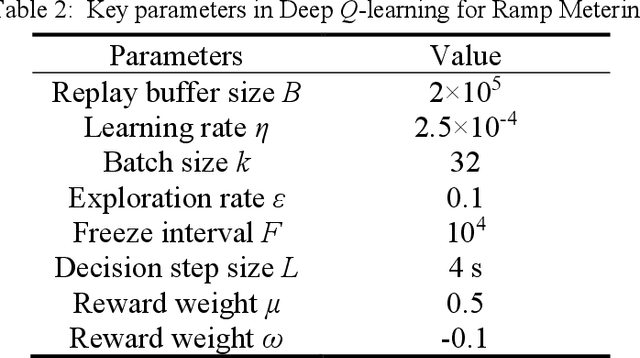
Ramp metering that uses traffic signals to regulate vehicle flows from the on-ramps has been widely implemented to improve vehicle mobility of the freeway. Previous studies generally update signal timings in real-time based on predefined traffic measures collected by point detectors, such as traffic volumes and occupancies. Comparing with point detectors, traffic cameras-which have been increasingly deployed on road networks-could cover larger areas and provide more detailed traffic information. In this work, we propose a deep reinforcement learning (DRL) method to explore the potential of traffic video data in improving the efficiency of ramp metering. The proposed method uses traffic video frames as inputs and learns the optimal control strategies directly from the high-dimensional visual inputs. A real-world case study demonstrates that, in comparison with a state-of-the-practice method, the proposed DRL method results in 1) lower travel times in the mainline, 2) shorter vehicle queues at the on-ramp, and 3) higher traffic flows downstream of the merging area. The results suggest that the proposed method is able to extract useful information from the video data for better ramp metering controls.