 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCauTraj: A Causal-Knowledge-Guided Framework for Lane-Changing Trajectory Planning of Autonomous Vehicles
Dec 21, 2025



Enhancing the performance of trajectory planners for lane - changing vehicles is one of the key challenges in autonomous driving within human - machine mixed traffic. Most existing studies have not incorporated human drivers' prior knowledge when designing trajectory planning models. To address this issue, this study proposes a novel trajectory planning framework that integrates causal prior knowledge into the control process. Both longitudinal and lateral microscopic behaviors of vehicles are modeled to quantify interaction risk, and a staged causal graph is constructed to capture causal dependencies in lane-changing scenarios. Causal effects between the lane-changing vehicle and surrounding vehicles are then estimated using causal inference, including average causal effects (ATE) and conditional average treatment effects (CATE). These causal priors are embedded into a model predictive control (MPC) framework to enhance trajectory planning. The proposed approach is validated on naturalistic vehicle trajectory datasets. Experimental results show that: (1) causal inference provides interpretable and stable quantification of vehicle interactions; (2) individual causal effects reveal driver heterogeneity; and (3) compared with the baseline MPC, the proposed method achieves a closer alignment with human driving behaviors, reducing maximum trajectory deviation from 1.2 m to 0.2 m, lateral velocity fluctuation by 60%, and yaw angle variability by 50%. These findings provide methodological support for human-like trajectory planning and practical value for improving safety, stability, and realism in autonomous vehicle testing and traffic simulation platforms.
Human-Vehicle Cooperative Visual Perception for Shared Autonomous Driving
Dec 17, 2021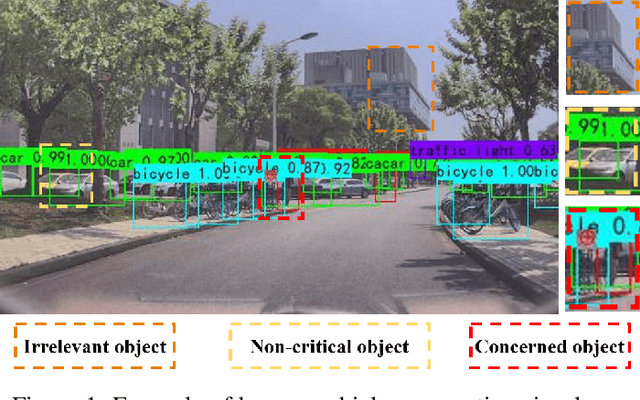
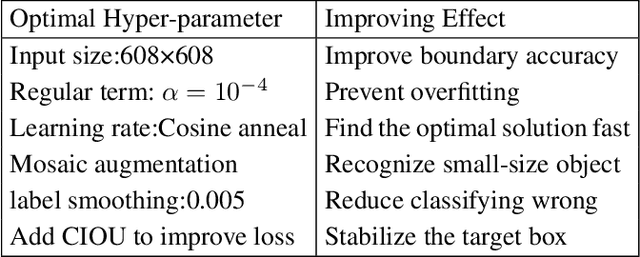
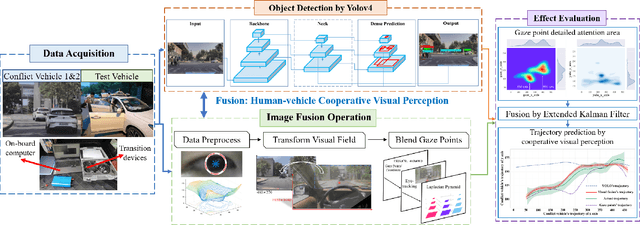
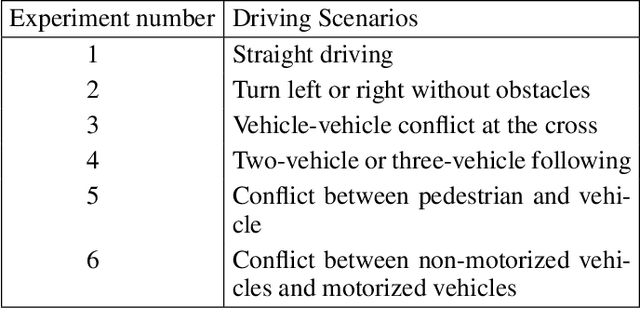
With the development of key technologies like environment perception, the automation level of autonomous vehicles has been increasing. However, before reaching highly autonomous driving, manual driving still needs to participate in the driving process to ensure the safety of human-vehicle shared driving. The existing human-vehicle cooperative driving focuses on auto engineering and drivers' behaviors, with few research studies in the field of visual perception. Due to the bad performance in the complex road traffic conflict scenarios, cooperative visual perception needs to be studied further. In addition, the autonomous driving perception system cannot correctly understand the characteristics of manual driving. Based on the background above, this paper directly proposes a human-vehicle cooperative visual perception method to enhance the visual perception ability of shared autonomous driving based on the transfer learning method and the image fusion algorithm for the complex road traffic scenarios. Based on transfer learning, the mAP of object detection reaches 75.52% and lays a solid foundation for visual fusion. And the fusion experiment further reveals that human-vehicle cooperative visual perception reflects the riskiest zone and predicts the conflict object's trajectory more precisely. This study pioneers a cooperative visual perception solution for shared autonomous driving and experiments in real-world complex traffic conflict scenarios, which can better support the following planning and controlling and improve the safety of autonomous vehicles.