 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeHome: A Simulation Environment for Deformable Object Manipulation in Household Scenarios
Apr 24, 2026Household environments present one of the most common, impactful yet challenging application domains for robotics. Within household scenarios, manipulating deformable objects is particularly difficult, both in simulation and real-world execution, due to varied categories and shapes, complex dynamics, and diverse material properties, as well as the lack of reliable deformable-object support in existing simulations. We introduce LeHome, a comprehensive simulation environment designed for deformable object manipulation in household scenarios. LeHome covers a wide spectrum of deformable objects, such as garments and food items, offering high-fidelity dynamics and realistic interactions that existing simulators struggle to simulate accurately. Moreover, LeHome supports multiple robotic embodiments and emphasizes low-cost robots as a core focus, enabling end-to-end evaluation of household tasks on resource-constrained hardware. By bridging the gap between realistic deformable object simulation and practical robotic platforms, LeHome provides a scalable testbed for advancing household robotics. Webpage: https://lehome-web.github.io/ .
World-Coordinate Human Motion Retargeting via SAM 3D Body
Dec 25, 2025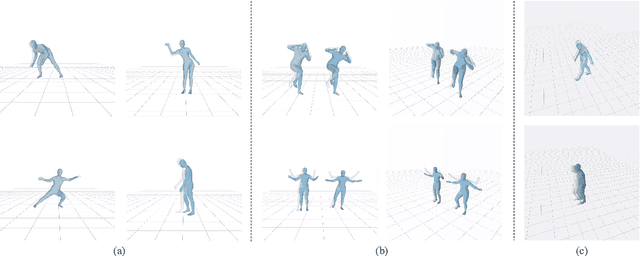
Recovering world-coordinate human motion from monocular videos with humanoid robot retargeting is significant for embodied intelligence and robotics. To avoid complex SLAM pipelines or heavy temporal models, we propose a lightweight, engineering-oriented framework that leverages SAM 3D Body (3DB) as a frozen perception backbone and uses the Momentum HumanRig (MHR) representation as a robot-friendly intermediate. Our method (i) locks the identity and skeleton-scale parameters of per tracked subject to enforce temporally consistent bone lengths, (ii) smooths per-frame predictions via efficient sliding-window optimization in the low-dimensional MHR latent space, and (iii) recovers physically plausible global root trajectories with a differentiable soft foot-ground contact model and contact-aware global optimization. Finally, we retarget the reconstructed motion to the Unitree G1 humanoid using a kinematics-aware two-stage inverse kinematics pipeline. Results on real monocular videos show that our method has stable world trajectories and reliable robot retargeting, indicating that structured human representations with lightweight physical constraints can yield robot-ready motion from monocular input.
Multi-Objective Personalized Product Retrieval in Taobao Search
Oct 09, 2022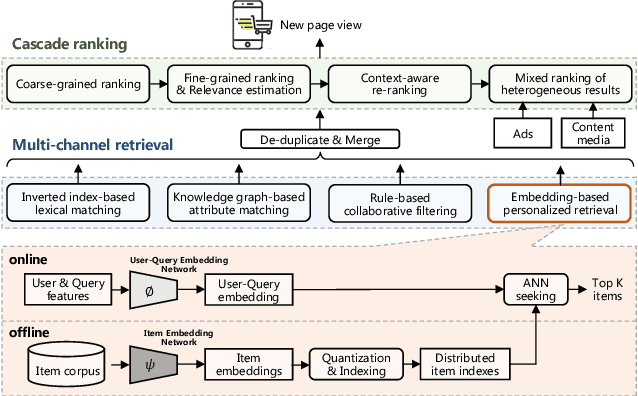

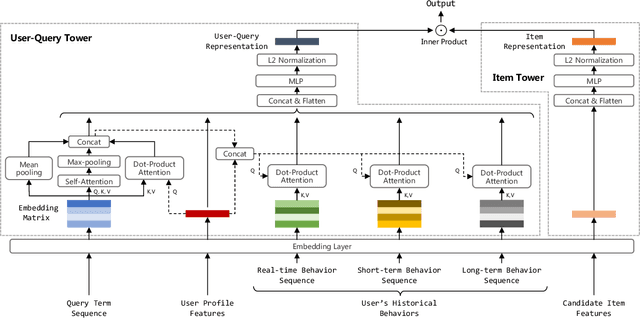

In large-scale e-commerce platforms like Taobao, it is a big challenge to retrieve products that satisfy users from billions of candidates. This has been a common concern of academia and industry. Recently, plenty of works in this domain have achieved significant improvements by enhancing embedding-based retrieval (EBR) methods, including the Multi-Grained Deep Semantic Product Retrieval (MGDSPR) model [16] in Taobao search engine. However, we find that MGDSPR still has problems of poor relevance and weak personalization compared to other retrieval methods in our online system, such as lexical matching and collaborative filtering. These problems promote us to further strengthen the capabilities of our EBR model in both relevance estimation and personalized retrieval. In this paper, we propose a novel Multi-Objective Personalized Product Retrieval (MOPPR) model with four hierarchical optimization objectives: relevance, exposure, click and purchase. We construct entire-space multi-positive samples to train MOPPR, rather than the single-positive samples for existing EBR models.We adopt a modified softmax loss for optimizing multiple objectives. Results of extensive offline and online experiments show that MOPPR outperforms the baseline MGDSPR on evaluation metrics of relevance estimation and personalized retrieval. MOPPR achieves 0.96% transaction and 1.29% GMV improvements in a 28-day online A/B test. Since the Double-11 shopping festival of 2021, MOPPR has been fully deployed in mobile Taobao search, replacing the previous MGDSPR. Finally, we discuss several advanced topics of our deeper explorations on multi-objective retrieval and ranking to contribute to the community.