 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Coarse-to-Fine Subgoal Refinement for Long-Horizon Offline Goal-Conditioned Reinforcement Learning
May 27, 2026Offline goal-conditioned reinforcement learning (GCRL) is challenging in long-horizon tasks, where distant state--goal pairs provide weak supervision and value estimates become vulnerable to accumulated bootstrapping errors. Hierarchical methods mitigate this difficulty by introducing intermediate subgoals, but fixed temporal abstractions or fixed hierarchy depths can be mismatched to state--goal pairs with different reachability horizons. We propose Coarse-to-Fine Hierarchical Goal Reinforcement Learning (CFHRL), a fully offline GCRL framework that adaptively refines distant goals before execution. Starting from the final goal, CFHRL recursively proposes intermediate targets, trained from replay-supported candidates, and stops refinement once the current target is estimated to be locally executable by a learned reachability cost. The key idea is that a subgoal need not be an exact midpoint or globally optimal waypoint; it only needs to provide reliable progress and reduce the remaining reaching difficulty, enabling subsequent refinement over shorter horizons. A stylized analysis further supports the robustness of approximate recursive contraction. Experiments on OGBench show substantial gains on several long-horizon tasks, with ablations validating the proposed refinement and stopping mechanisms
GRASP: group-Shapley feature selection for patients
Feb 11, 2026Feature selection remains a major challenge in medical prediction, where existing approaches such as LASSO often lack robustness and interpretability. We introduce GRASP, a novel framework that couples Shapley value driven attribution with group $L_{21}$ regularization to extract compact and non-redundant feature sets. GRASP first distills group level importance scores from a pretrained tree model via SHAP, then enforces structured sparsity through group $L_{21}$ regularized logistic regression, yielding stable and interpretable selections. Extensive comparisons with LASSO, SHAP, and deep learning based methods show that GRASP consistently delivers comparable or superior predictive accuracy, while identifying fewer, less redundant, and more stable features.
A Black-box Attack on Neural Networks Based on Swarm Evolutionary Algorithm
Jan 26, 2019

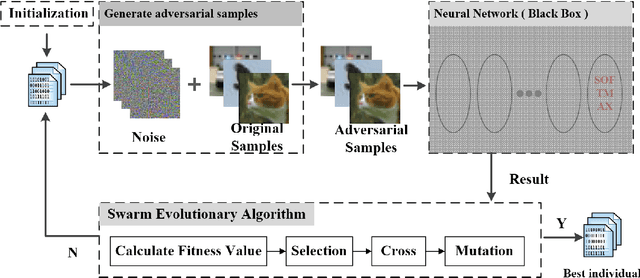
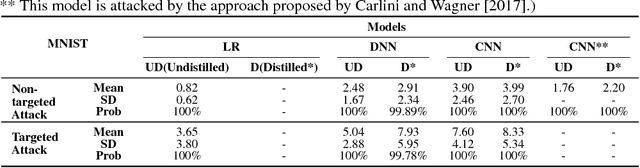
Neural networks play an increasingly important role in the field of machine learning and are included in many applications in society. Unfortunately, neural networks suffer from adversarial samples generated to attack them. However, most of the generation approaches either assume that the attacker has full knowledge of the neural network model or are limited by the type of attacked model. In this paper, we propose a new approach that generates a black-box attack to neural networks based on the swarm evolutionary algorithm. Benefiting from the improvements in the technology and theoretical characteristics of evolutionary algorithms, our approach has the advantages of effectiveness, black-box attack, generality, and randomness. Our experimental results show that both the MNIST images and the CIFAR-10 images can be perturbed to successful generate a black-box attack with 100\% probability on average. In addition, the proposed attack, which is successful on distilled neural networks with almost 100\% probability, is resistant to defensive distillation. The experimental results also indicate that the robustness of the artificial intelligence algorithm is related to the complexity of the model and the data set. In addition, we find that the adversarial samples to some extent reproduce the characteristics of the sample data learned by the neural network model.