 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Aware 3D Gaussian Editing for Driving Scene Generation
May 25, 20263D Gaussian Splatting (3DGS) has shown great potential in autonomous driving simulation and data generation, enabling photorealistic reconstruction and flexible scene manipulation. However, existing 3DGS scene editing methods have limited support for road geometry editing (e.g., inserting speed humps or sunken roads), and generally do not couple such edits with plausible vehicle-road interaction dynamics. Such editing is essential for generating training data under extreme driving scenarios or evaluating system reliability under these road irregularities. Moreover, many optimization-based methods require minutes of per-edit refinement, while existing efficient alternatives mainly focus on appearance-level or object-level manipulation rather than physics-aware road irregularity editing. To address these limitations, we propose RoVES, a Road-and-Vehicle Editing System for physics-aware 3D Gaussian editing in driving scenes. RoVES enables single-image-driven road geometry insertion and couples the edited road profile with a 4-DOF half-car vehicle dynamics model to achieve physics-aware vehicle pose correction in vertical displacement and pitch. RoVES inserts road elements in a one-shot, optimization-free pipeline (1.84s), and the full pipeline (including color transfer and vehicle-dynamics-based pose correction) completes in 6.24s; it edits dynamic vehicles via pose editing and corrects poses frame-by-frame to approximate dynamics-consistent vertical displacement and pitch responses. Experiments on the Waymo dataset show that RoVES provides practical efficiency and competitive visual consistency for physics-aware driving scene generation.
Unsupervised Deformable Medical Image Registration via Pyramidal Residual Deformation Fields Estimation
Apr 16, 2020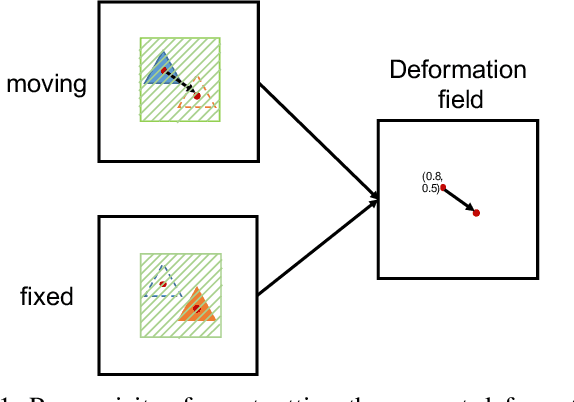
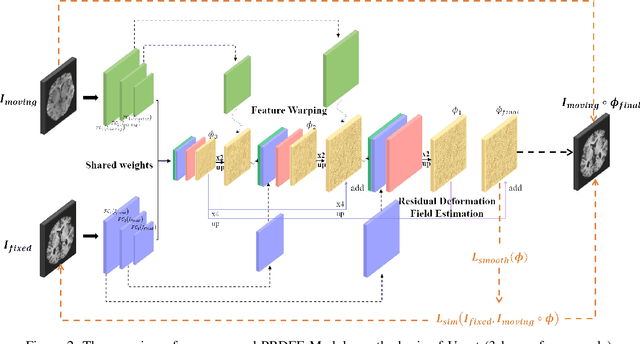
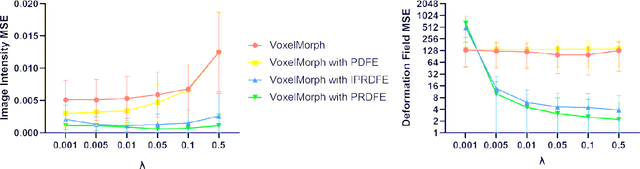
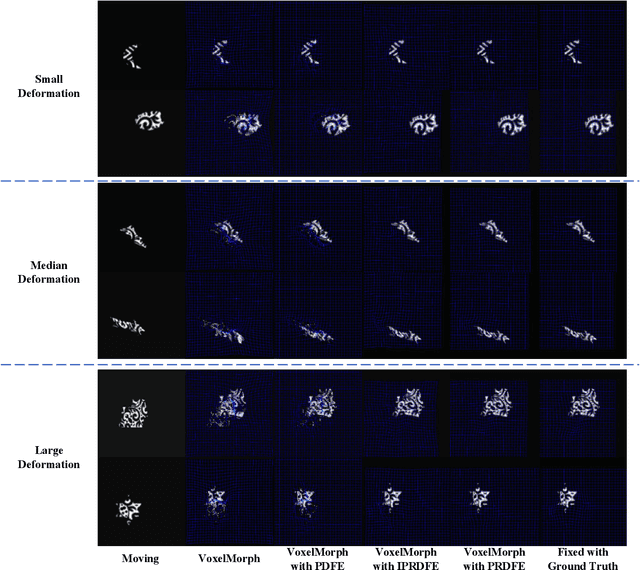
Deformation field estimation is an important and challenging issue in many medical image registration applications. In recent years, deep learning technique has become a promising approach for simplifying registration problems, and has been gradually applied to medical image registration. However, most existing deep learning registrations do not consider the problem that when the receptive field cannot cover the corresponding features in the moving image and the fixed image, it cannot output accurate displacement values. In fact, due to the limitation of the receptive field, the 3 x 3 kernel has difficulty in covering the corresponding features at high/original resolution. Multi-resolution and multi-convolution techniques can improve but fail to avoid this problem. In this study, we constructed pyramidal feature sets on moving and fixed images and used the warped moving and fixed features to estimate their "residual" deformation field at each scale, called the Pyramidal Residual Deformation Field Estimation module (PRDFE-Module). The "total" deformation field at each scale was computed by upsampling and weighted summing all the "residual" deformation fields at all its previous scales, which can effectively and accurately transfer the deformation fields from low resolution to high resolution and is used for warping the moving features at each scale. Simulation and real brain data results show that our method improves the accuracy of the registration and the rationality of the deformation field.