 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttitude Reconstruction from Inertial Measurement: Mitigating Runge Effect for Dynamic Applications
Jul 10, 2021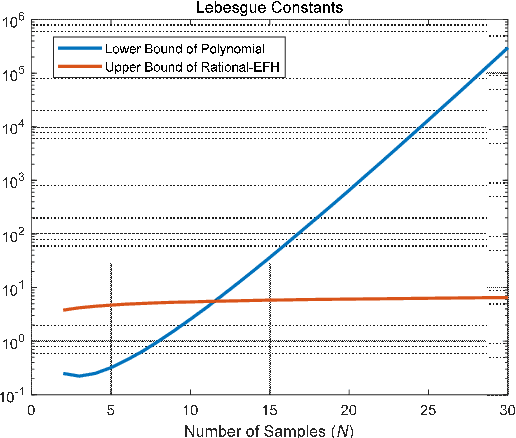
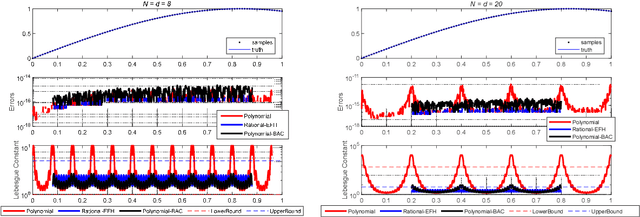
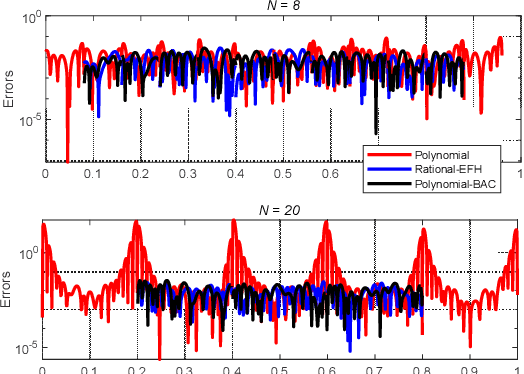
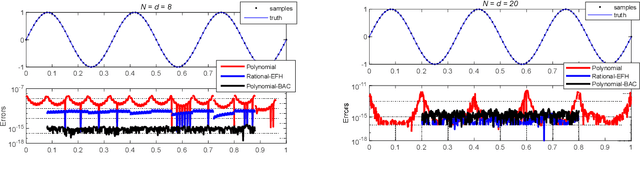
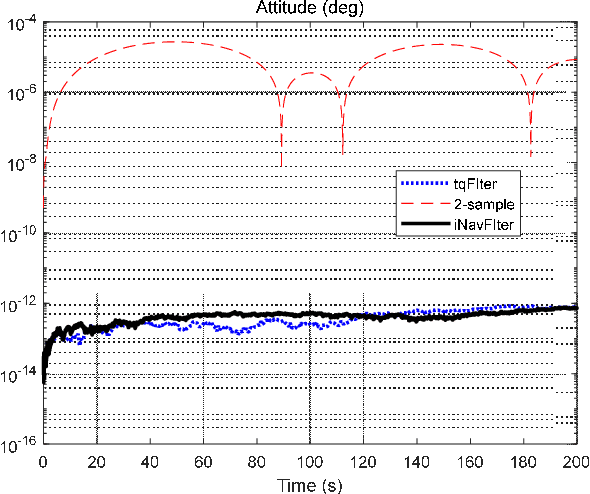
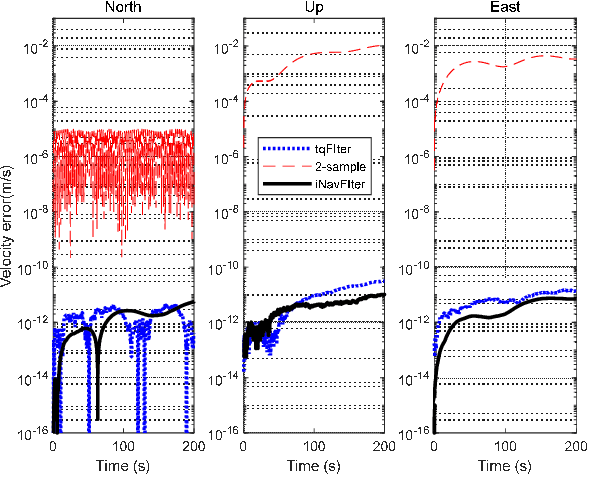
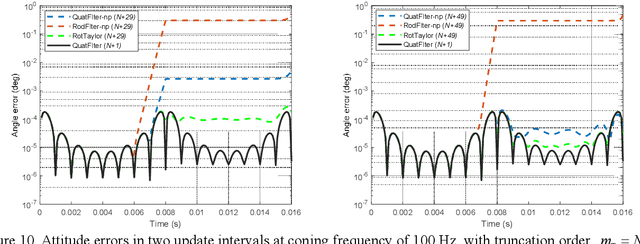
Time-equispaced inertial measurements are practically used as inputs for motion determination. Polynomial interpolation is a common technique of recovering the gyroscope signal but is subject to a fundamentally numerical stability problem due to the Runge effect on equispaced samples. This paper reviews the theoretical results of Runge phenomenon in related areas and proposes a straightforward borrowing-and-cutting (BAC) strategy to depress it. It employs the neighboring samples for higher-order polynomial interpolation but only uses the middle polynomial segment in the actual time interval. The BAC strategy has been incorporated into attitude computation by functional iteration, leading to accuracy benefit of several orders of magnitude under the classical coning motion. It would potentially bring significant benefits to the inertial navigation computation under sustained dynamic motions.
A Pose-only Solution to Visual Reconstruction and Navigation
Mar 02, 2021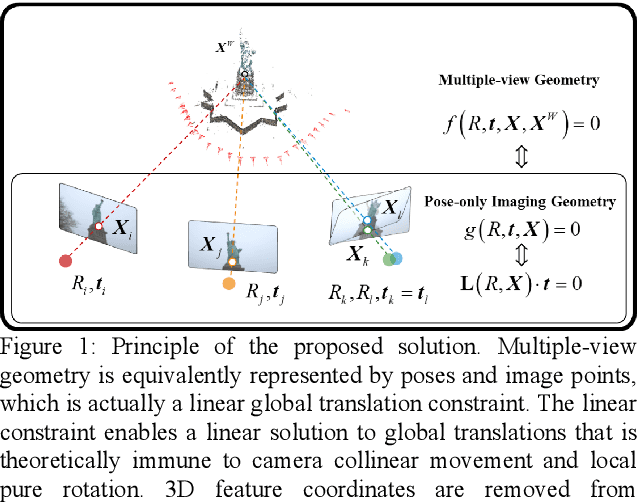
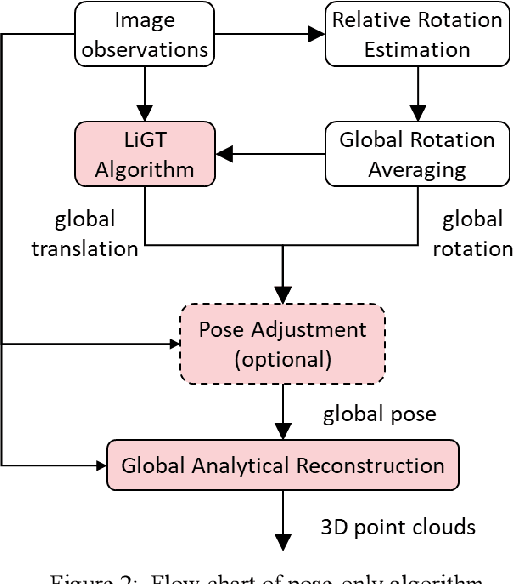
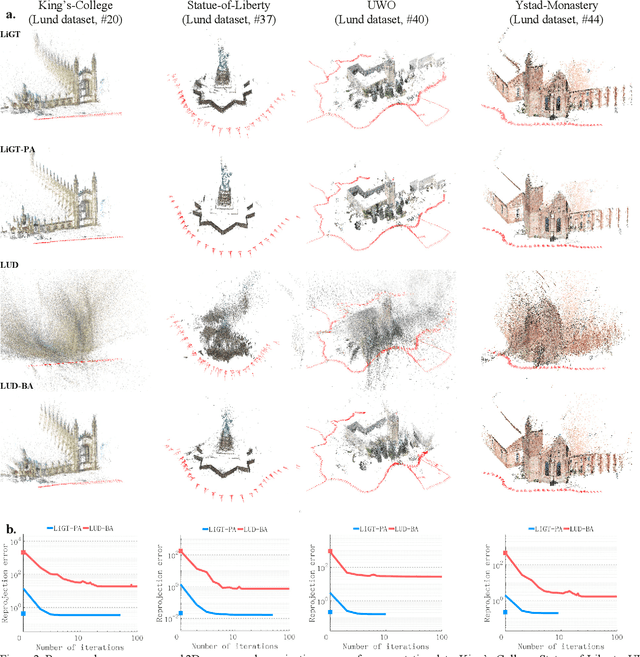
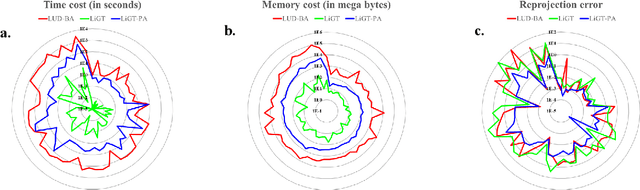
Visual navigation and three-dimensional (3D) scene reconstruction are essential for robotics to interact with the surrounding environment. Large-scale scenes and critical camera motions are great challenges facing the research community to achieve this goal. We raised a pose-only imaging geometry framework and algorithms that can help solve these challenges. The representation is a linear function of camera global translations, which allows for efficient and robust camera motion estimation. As a result, the spatial feature coordinates can be analytically reconstructed and do not require nonlinear optimization. Experiments demonstrate that the computational efficiency of recovering the scene and associated camera poses is significantly improved by 2-4 orders of magnitude. This solution might be promising to unlock real-time 3D visual computing in many forefront applications.
A Trident Quaternion Framework for Inertial-based Navigation Part II: Error Models and Application to Initial Alignment
Feb 24, 2021

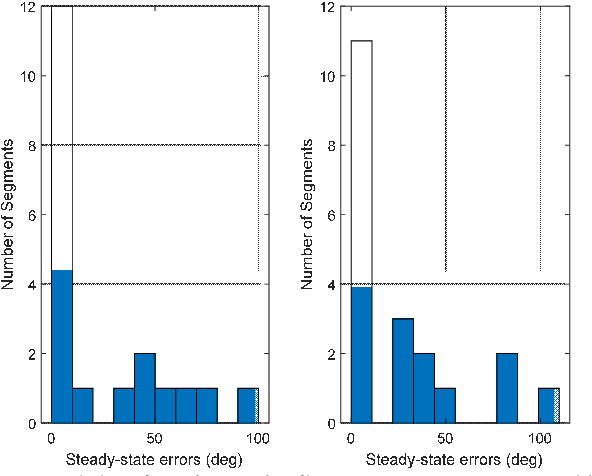
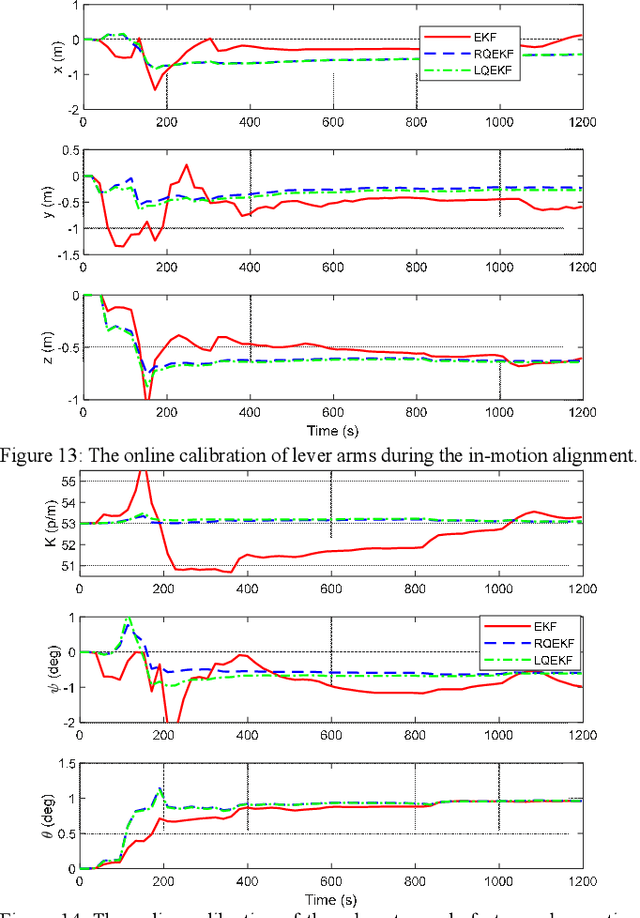
This work deals with error models for trident quaternion framework proposed in the companion paper "A Trident Quaternion Framework for Inertial-based Navigation Part I: Motion Representation and Computation" and further uses them to investigate the static and in-motion alignment for land vehicles. Specifically, the zero-velocity and odometer velocity measurements are applied in the static and in-motion alignment process, respectively. By linearizing the trident quaternion kinematic equation, the right and left trident quaternion error models are obtained. The resultant models are found to be equivalent to those derived from profound group affine. Then the two models are used to design the corresponding extended Kalman filters (EKF), namely, the left-quaternion EKF (LQEKF) and the right-quaternion EKF (RQEKF). Simulations and field tests are conducted to evaluate their actual performances. For the static alignment, owing to their high consistency, the L/RQEKF converge much faster than the EKF even without any heading information. For the in-motion alignment, however, the two filters still need the assistance of the analytical/optimization-based in-motion alignment methods at the very start to avoid extremely large attitude errors, although they possess much larger convergence region than the traditional EKF does.
A Trident Quaternion Framework for Inertial-based Navigation Part I: Rigid Motion Representation and Computation
Feb 24, 2021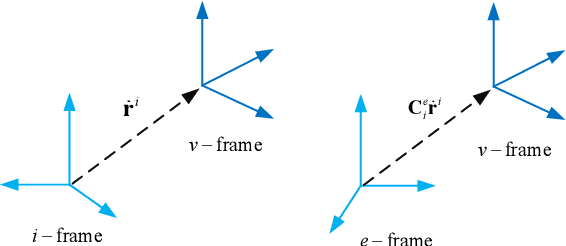
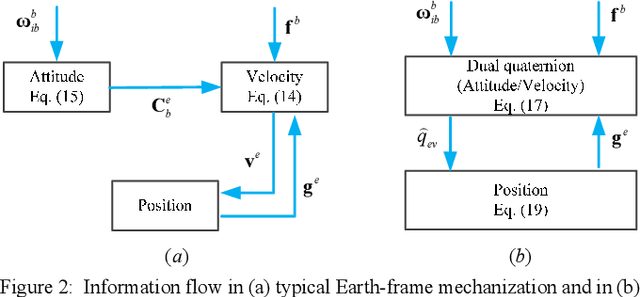
Strapdown inertial navigation research involves the parameterization and computation of the attitude, velocity and position of a rigid body in a chosen reference frame. The community has long devoted to finding the most concise and efficient representation for the strapdown inertial navigation system (INS). The current work is motivated by simplifying the existing dual quaternion representation of the kinematic model. This paper proposes a compact and elegant representation of the body's attitude, velocity and position, with the aid of a devised trident quaternion tool in which the position is accounted for by adding a second imaginary part to the dual quaternion. Eventually, the kinematics of strapdown INS are cohesively unified in one concise differential equation, which bears the same form as the classical attitude quaternion equation. In addition, the computation of this trident quaternion-based kinematic equation is implemented with the recently proposed functional iterative integration approach. Numerical results verify the analysis and show that incorporating the new representation into the functional iterative integration scheme achieves high inertial navigation computation accuracy as well.
Segmenting Epipolar Line
Oct 11, 2020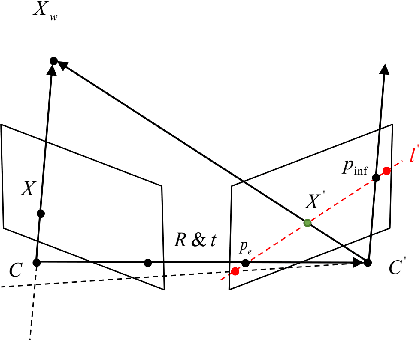
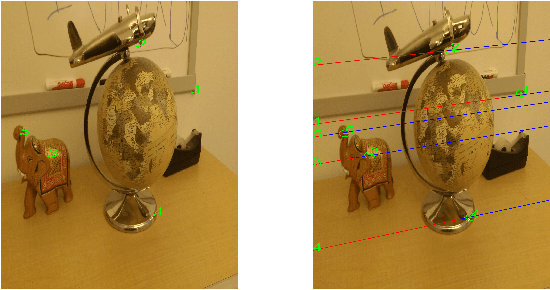
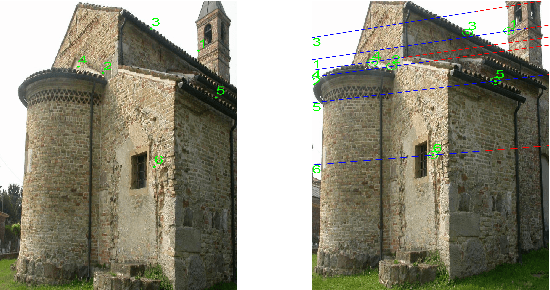
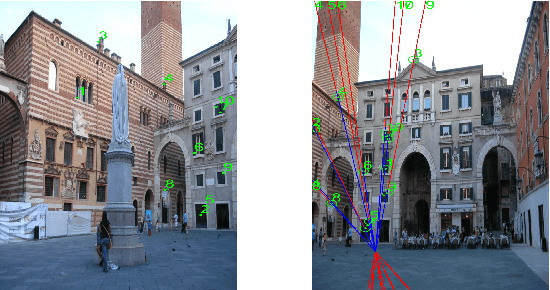
Identifying feature correspondence between two images is a fundamental procedure in three-dimensional computer vision. Usually the feature search space is confined by the epipolar line. Using the cheirality constraint, this paper finds that the feature search space can be restrained to one of two or three segments of the epipolar line that are defined by the epipole and a so-called virtual infinity point.
INS/Odometer Land Navigation by Accurate Measurement Modeling and Multiple-Model Adaptive Estimation
Jul 21, 2020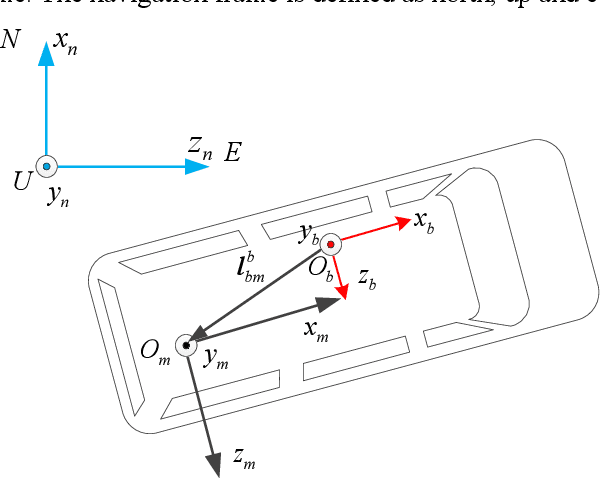
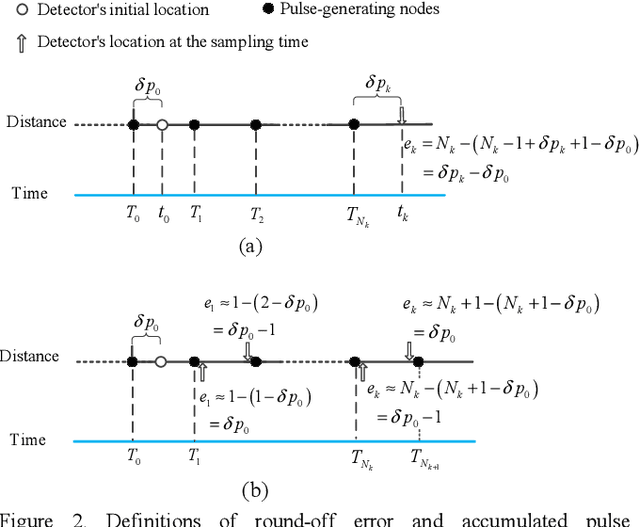
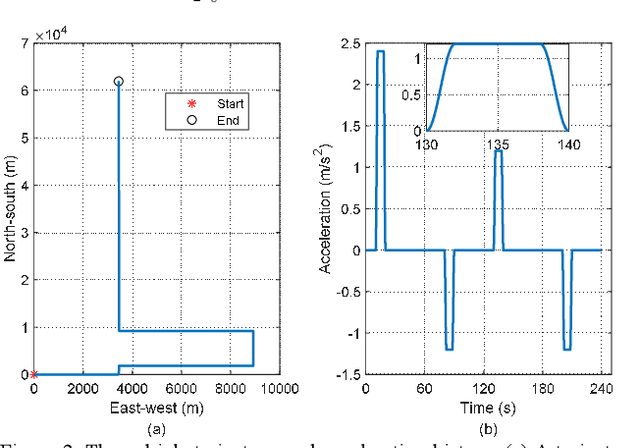
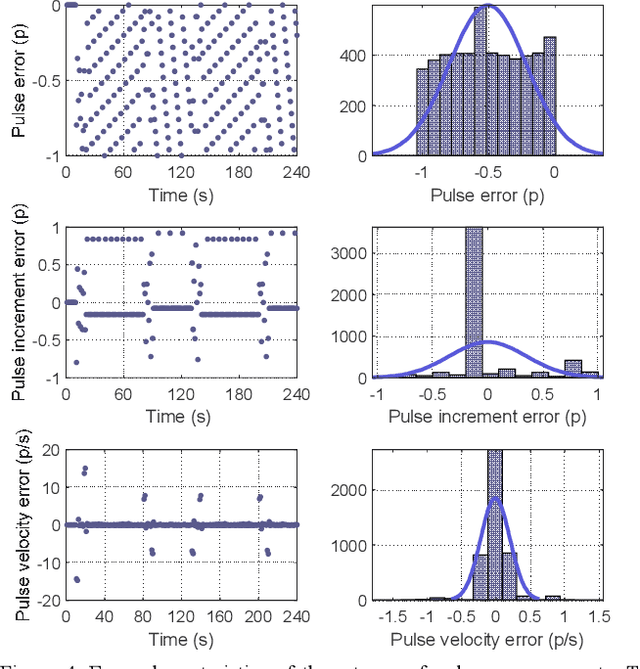
Land vehicle navigation based on inertial navigation system (INS) and odometers is a classical autonomous navigation application and has been extensively studied over the past several decades. In this work, we seriously analyze the error characteristics of the odometer (OD) pulses and investigate three types of odometer measurement models in the INS/OD integrated system. Specifically, in the pulse velocity model, a preliminary Kalman filter is designed to obtain accurate vehicle velocity from the accumulated pulses; the pulse increment model is accordingly obtained by integrating the pulse velocity; a new pulse accumulation model is proposed by augmenting the travelled distance into the system state. The three types of measurements, along with the nonhonolomic constraint (NHC), are implemented in the standard extended Kalman filter. In view of the motion-related pulse error characteristics, the multiple model adaptive estimation (MMAE) approach is exploited to further enhance the performance. Simulations and long-distance experiments are conducted to verify the feasibility and effectiveness of the proposed methods. It is shown that the standard pulse velocity measurement achieves the superior performance, whereas the accumulated pulse measurement is most favorable with the MMAE enhancement.
Strapdown Attitude Computation: Functional Iterative Integration versus Taylor Series Expansion
Sep 22, 2019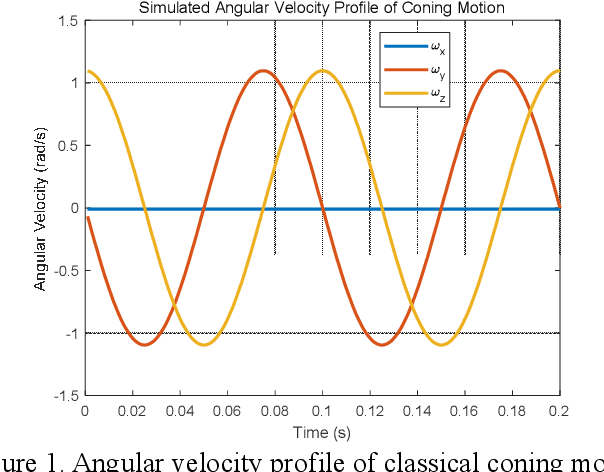
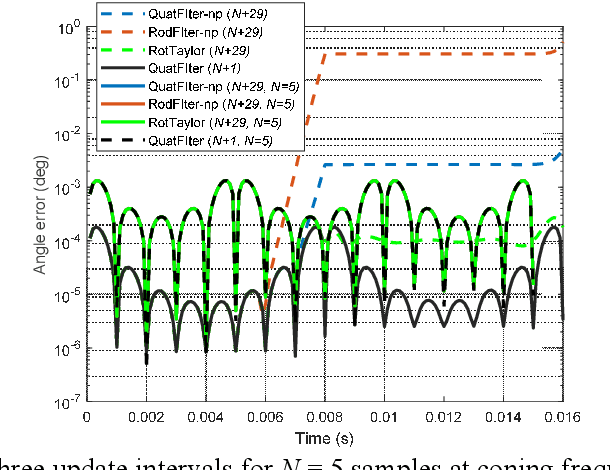
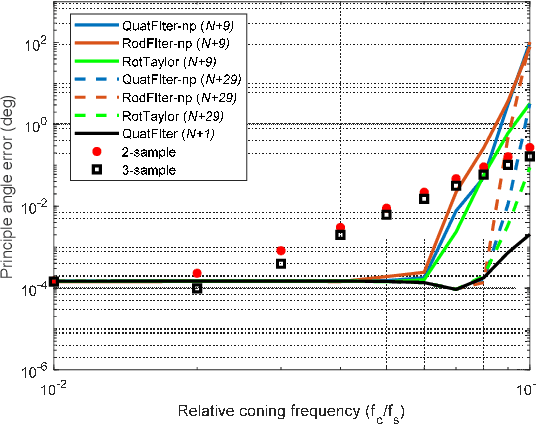
This paper compares two basic approaches to solving ordinary differential equations, which form the basis for attitude computation in strapdown inertial navigation systems, namely, the Taylor series expansion approach that was used in its low-order form for deriving all mainstream algorithms and the functional iterative integration approach developed recently. They are respectively applied to solve the kinematic equations of major attitude parameters, including the quaternion, the Rodrigues vector and the rotation vector. Specifically, the mainstream algorithms, which have unexceptionally relied on the simplified rotation vector, are considerably extended by the Taylor series expansion approach using the exact rotation vector and recursive calculation of high-order derivatives. The functional iterative integration approach is respectively implemented on both the normal polynomial and the Chebyshev polynomial. Numerical results under the classical coning motion are reported to assess all derived attitude algorithms. It is revealed that in the relative frequency range when the coning to sampling frequency ratio is below 0.05-0.1 (depending on the chosen polynomial truncation order), all algorithms have the same order of accuracy if the same number of samples are used to fit the angular velocity over the iteration interval; in the range of higher relative frequency, the group of Quat/Rod/RotFIter algorithms (by the functional iterative integration approach combined with the Chebyshev polynomial) perform the best in both accuracy and robustness to the Runge phenomenon, thanks to the excellent numerical stability and powerful functional representation capability of the Chebyshev polynomial.
Next-Generation Inertial Navigation Computation Based on Functional Iteration
May 28, 2019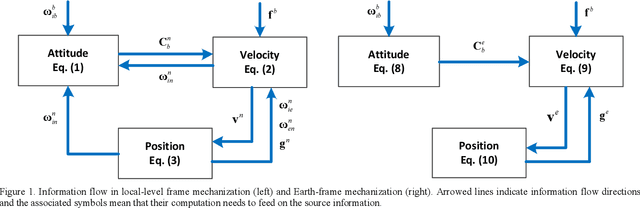
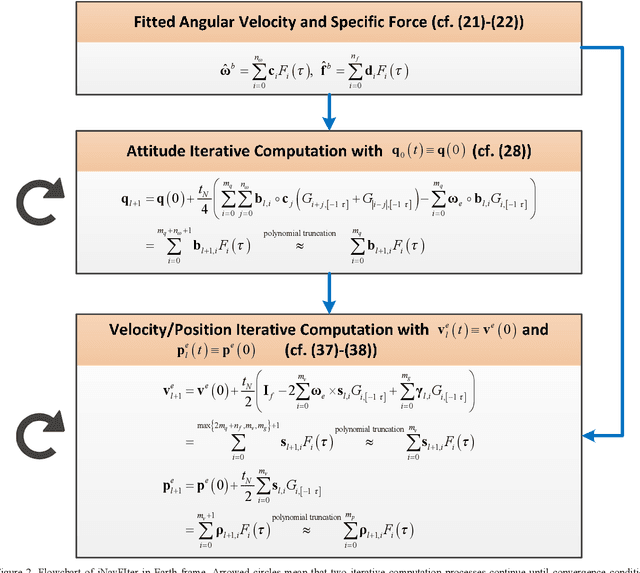
Inertial navigation computation is to acquire the attitude, velocity and position information of a moving body by integrating inertial measurements from gyroscopes and accelerometers. Over half a century has witnessed great efforts in coping with the motion non-commutativity errors to accurately compute the navigation information as far as possible, so as not to comprise the quality measurements of inertial sensors. Highly dynamic applications and the forthcoming cold-atom precision inertial navigation systems demand for even more accurate inertial navigation computation. The paper gives birth to an ultimate inertial navigation algorithm to fulfill that demand, named the iNavFIter, which is based on a brand new framework of functional iterative integration and Chebyshev polynomials. Remarkably, the proposed iNavFIter reduces the non-commutativity errors to almost machine precision, namely, the coning/sculling/scrolling errors that have perplexed the navigation community for long. Numerical results are provided to demonstrate its accuracy superiority over the-state-of-the-art inertial navigation algorithms at affordable computation cost.
General Method for Prime-point Cyclic Convolution over the Real Field
May 09, 2019A general and fast method is conceived for computing the cyclic convolution of n points, where n is a prime number. This method fully exploits the internal structure of the cyclic matrix, and hence leads to significant reduction of the multiplication complexity in terms of CPU time by 50%, as compared with Winograd's algorithm. In this paper, we only consider the real and complex fields due to their most important applications, but in general, the idea behind this method can be extended to any finite field of interest. Clearly, it is well-known that the discrete Fourier transform (DFT) can be expressed in terms of cyclic convolution, so it can be utilized to compute the DFT when the block length is a prime.
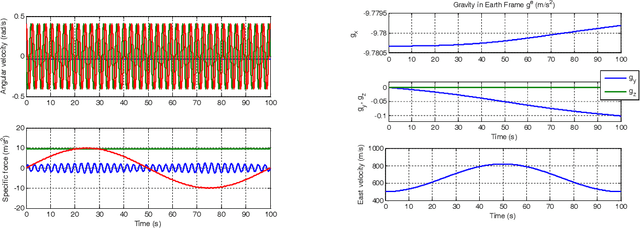
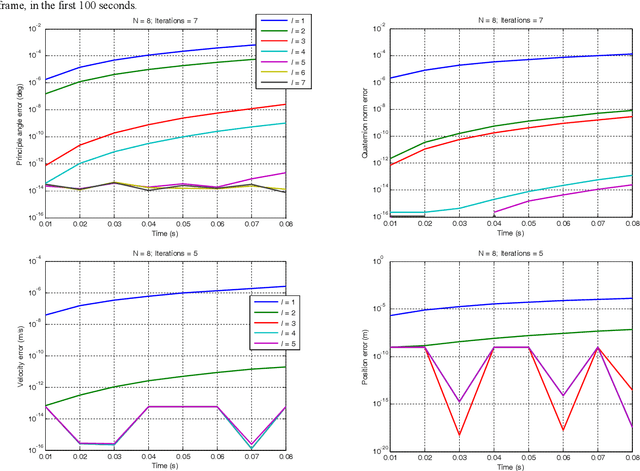
On Inertial Navigation and Attitude Initialization in Polar Areas
Mar 29, 2019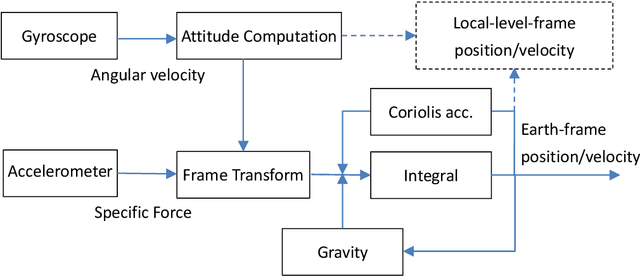
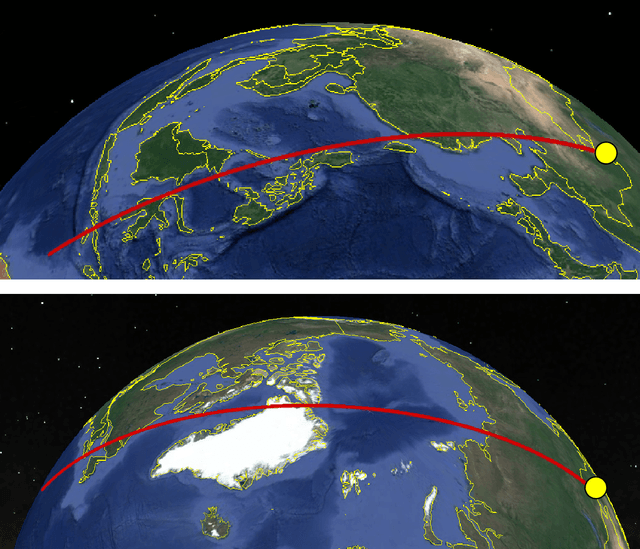
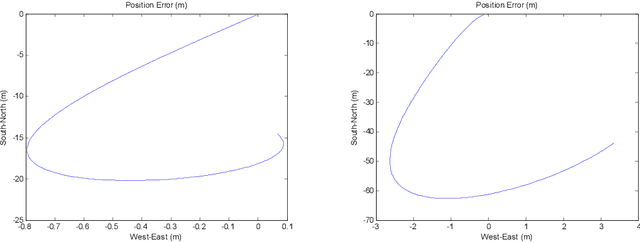
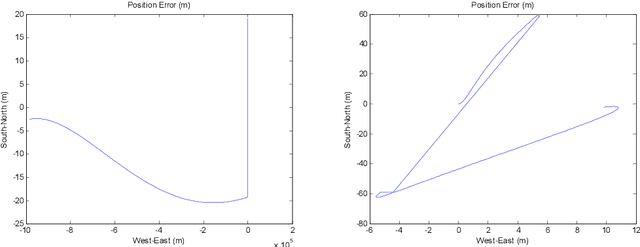
Inertial navigation and attitude initialization in polar areas become a hot topic in recent years in the navigation community, as the widely-used navigation mechanization of the local level frame encounters the inherent singularity when the latitude approaches 90 degrees. Great endeavors have been devoted to devising novel navigation mechanizations such as the grid or transversal frames. This paper highlights the fact that the common Earth-frame mechanization is sufficiently good to well handle the singularity problem in polar areas. Simulation results are reported to demonstrate the singularity problem and the effectiveness of the Earth-frame mechanization.