 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRestless Multi-Process Multi-Armed Bandits with Applications to Self-Driving Microscopies
Dec 16, 2025



High-content screening microscopy generates large amounts of live-cell imaging data, yet its potential remains constrained by the inability to determine when and where to image most effectively. Optimally balancing acquisition time, computational capacity, and photobleaching budgets across thousands of dynamically evolving regions of interest remains an open challenge, further complicated by limited field-of-view adjustments and sensor sensitivity. Existing approaches either rely on static sampling or heuristics that neglect the dynamic evolution of biological processes, leading to inefficiencies and missed events. Here, we introduce the restless multi-process multi-armed bandit (RMPMAB), a new decision-theoretic framework in which each experimental region is modeled not as a single process but as an ensemble of Markov chains, thereby capturing the inherent heterogeneity of biological systems such as asynchronous cell cycles and heterogeneous drug responses. Building upon this foundation, we derive closed-form expressions for transient and asymptotic behaviors of aggregated processes, and design scalable Whittle index policies with sub-linear complexity in the number of imaging regions. Through both simulations and a real biological live-cell imaging dataset, we show that our approach achieves substantial improvements in throughput under resource constraints. Notably, our algorithm outperforms Thomson Sampling, Bayesian UCB, epsilon-Greedy, and Round Robin by reducing cumulative regret by more than 37% in simulations and capturing 93% more biologically relevant events in live imaging experiments, underscoring its potential for transformative smart microscopy. Beyond improving experimental efficiency, the RMPMAB framework unifies stochastic decision theory with optimal autonomous microscopy control, offering a principled approach to accelerate discovery across multidisciplinary sciences.
A Multi-view Landmark Representation Approach with Application to GNSS-Visual-Inertial Odometry
Aug 07, 2025



Invariant Extended Kalman Filter (IEKF) has been a significant technique in vision-aided sensor fusion. However, it usually suffers from high computational burden when jointly optimizing camera poses and the landmarks. To improve its efficiency and applicability for multi-sensor fusion, we present a multi-view pose-only estimation approach with its application to GNSS-Visual-Inertial Odometry (GVIO) in this paper. Our main contribution is deriving a visual measurement model which directly associates landmark representation with multiple camera poses and observations. Such a pose-only measurement is proven to be tightly-coupled between landmarks and poses, and maintain a perfect null space that is independent of estimated poses. Finally, we apply the proposed approach to a filter based GVIO with a novel feature management strategy. Both simulation tests and real-world experiments are conducted to demonstrate the superiority of the proposed method in terms of efficiency and accuracy.
Adapting Video Diffusion Models for Time-Lapse Microscopy
Mar 24, 2025We present a domain adaptation of video diffusion models to generate highly realistic time-lapse microscopy videos of cell division in HeLa cells. Although state-of-the-art generative video models have advanced significantly for natural videos, they remain underexplored in microscopy domains. To address this gap, we fine-tune a pretrained video diffusion model on microscopy-specific sequences, exploring three conditioning strategies: (1) text prompts derived from numeric phenotypic measurements (e.g., proliferation rates, migration speeds, cell-death frequencies), (2) direct numeric embeddings of phenotype scores, and (3) image-conditioned generation, where an initial microscopy frame is extended into a complete video sequence. Evaluation using biologically meaningful morphological, proliferation, and migration metrics demonstrates that fine-tuning substantially improves realism and accurately captures critical cellular behaviors such as mitosis and migration. Notably, the fine-tuned model also generalizes beyond the training horizon, generating coherent cell dynamics even in extended sequences. However, precisely controlling specific phenotypic characteristics remains challenging, highlighting opportunities for future work to enhance conditioning methods. Our results demonstrate the potential for domain-specific fine-tuning of generative video models to produce biologically plausible synthetic microscopy data, supporting applications such as in-silico hypothesis testing and data augmentation.
An Immediate Update Strategy of Multi-State Constraint Kalman Filter
Nov 04, 2024



The lightweight Multi-state Constraint Kalman Filter (MSCKF) has been well-known for its high efficiency, in which the delayed update has been usually adopted since its proposal. This work investigates the immediate update strategy of MSCKF based on timely reconstructed 3D feature points and measurement constraints. The differences between the delayed update and the immediate update are theoretically analyzed in detail. It is found that the immediate update helps construct more observation constraints and employ more filtering updates than the delayed update, which improves the linearization point of the measurement model and therefore enhances the estimation accuracy. Numerical simulations and experiments show that the immediate update strategy significantly enhances MSCKF even with a small amount of feature observations.
Clifford Algebra-Based Iterated Extended Kalman Filter with Application to Low-Cost INS/GNSS Navigation
Nov 15, 2023



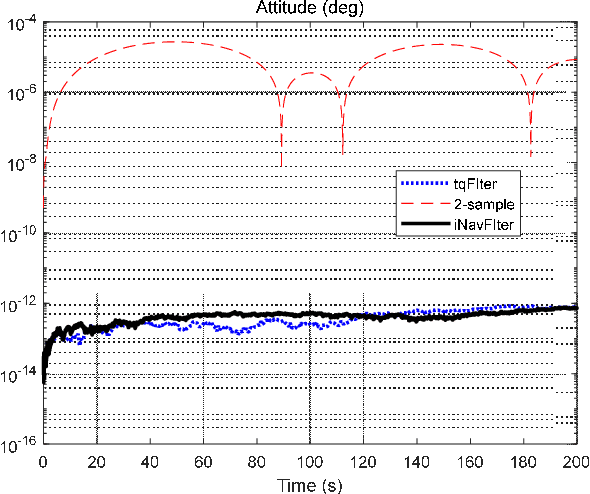
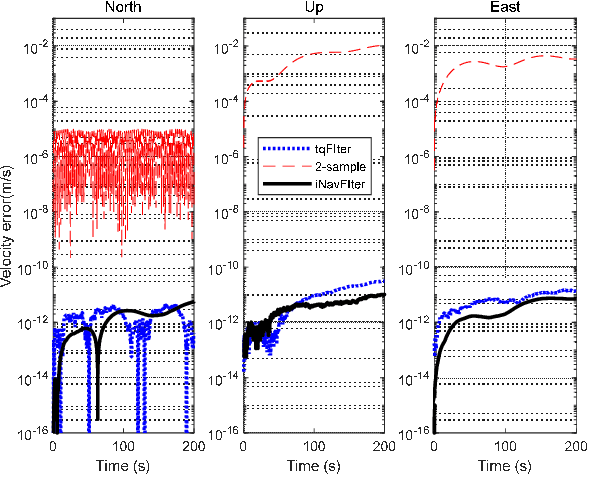
The traditional GNSS-aided inertial navigation system (INS) usually exploits the extended Kalman filter (EKF) for state estimation, and the initial attitude accuracy is key to the filtering performance. To spare the reliance on the initial attitude, this work generalizes the previously proposed trident quaternion within the framework of Clifford algebra to represent the extended pose, IMU biases and lever arms on the Lie group. Consequently, a quasi-group-affine system is established for the low-cost INS/GNSS integrated navigation system, and the right-error Clifford algebra-based EKF (Clifford-RQEKF) is accordingly developed. The iterated filtering approach is further applied to significantly improve the performances of the Clifford-RQEKF and the previously proposed trident quaternion-based EKFs. Numerical simulations and experiments show that all iterated filtering approaches fulfill the fast and global convergence without the prior attitude information, whereas the iterated Clifford-RQEKF performs much better than the others under especially large IMU biases.
BioImage.IO Chatbot: A Personalized Assistant for BioImage Analysis Augmented by Community Knowledge Base
Oct 31, 2023

The rapidly expanding landscape of bioimage analysis tools presents a navigational challenge for both experts and newcomers. Traditional search methods often fall short in assisting users in this complex environment. To address this, we introduce the BioImage$.$IO Chatbot, an AI-driven conversational assistant tailored for the bioimage community. Built upon large language models, this chatbot provides personalized, context-aware answers by aggregating and interpreting information from diverse databases, tool-specific documentation, and structured data sources. Enhanced by a community-contributed knowledge base and fine-tuned retrieval methods, the BioImage$.$IO Chatbot offers not just a personalized interaction but also a knowledge-enriched, context-aware experience. It fundamentally transforms the way biologists, bioimage analysts, and developers navigate and utilize advanced bioimage analysis tools, setting a new standard for community-driven, accessible scientific research.
JDLL: A library to run Deep Learning models on Java bioimage informatics platforms
Jun 07, 2023We present JDLL, an agile Java library that offers a comprehensive toolset/API to unify the development of high-end applications of DL for bioimage analysis and to streamline their installation and maintenance. JDLL provides all the functions required to consume DL models seamlessly, without being burdened by the configuration of the Python-based DL frameworks, within Java bioimage informatics platforms. Moreover, it allows the deployment of pre-trained models in the Bioimage Model Zoo (BMZ) by shipping the logic to connect to the BMZ website, download and run a selected model inference.
Roadmap on Deep Learning for Microscopy
Mar 07, 2023



Through digital imaging, microscopy has evolved from primarily being a means for visual observation of life at the micro- and nano-scale, to a quantitative tool with ever-increasing resolution and throughput. Artificial intelligence, deep neural networks, and machine learning are all niche terms describing computational methods that have gained a pivotal role in microscopy-based research over the past decade. This Roadmap is written collectively by prominent researchers and encompasses selected aspects of how machine learning is applied to microscopy image data, with the aim of gaining scientific knowledge by improved image quality, automated detection, segmentation, classification and tracking of objects, and efficient merging of information from multiple imaging modalities. We aim to give the reader an overview of the key developments and an understanding of possibilities and limitations of machine learning for microscopy. It will be of interest to a wide cross-disciplinary audience in the physical sciences and life sciences.
A Trident Quaternion Framework for Inertial-based Navigation Part II: Error Models and Application to Initial Alignment
Feb 24, 2021

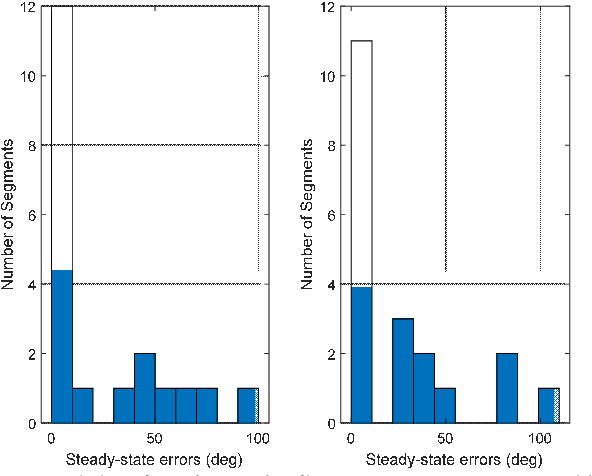
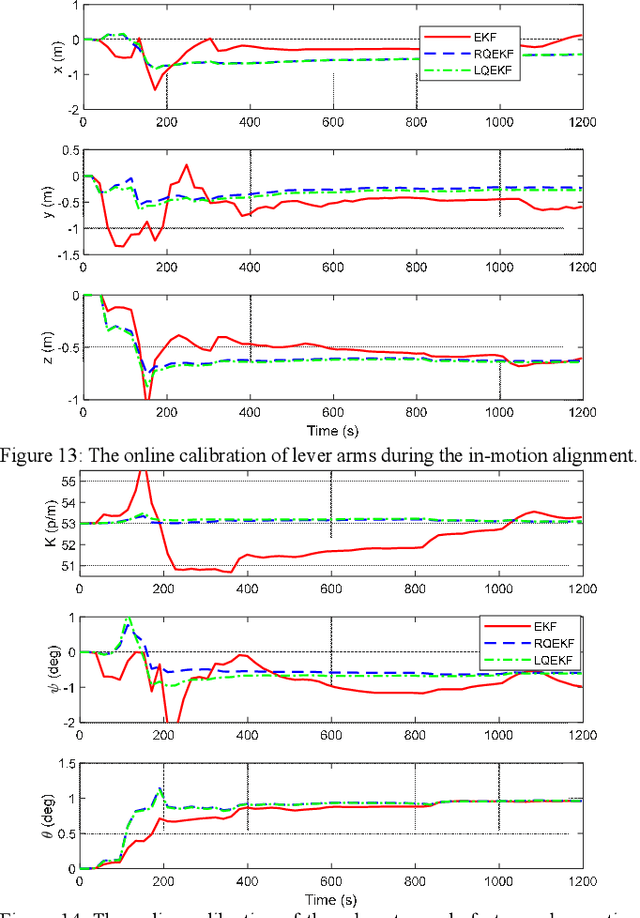
This work deals with error models for trident quaternion framework proposed in the companion paper "A Trident Quaternion Framework for Inertial-based Navigation Part I: Motion Representation and Computation" and further uses them to investigate the static and in-motion alignment for land vehicles. Specifically, the zero-velocity and odometer velocity measurements are applied in the static and in-motion alignment process, respectively. By linearizing the trident quaternion kinematic equation, the right and left trident quaternion error models are obtained. The resultant models are found to be equivalent to those derived from profound group affine. Then the two models are used to design the corresponding extended Kalman filters (EKF), namely, the left-quaternion EKF (LQEKF) and the right-quaternion EKF (RQEKF). Simulations and field tests are conducted to evaluate their actual performances. For the static alignment, owing to their high consistency, the L/RQEKF converge much faster than the EKF even without any heading information. For the in-motion alignment, however, the two filters still need the assistance of the analytical/optimization-based in-motion alignment methods at the very start to avoid extremely large attitude errors, although they possess much larger convergence region than the traditional EKF does.
A Trident Quaternion Framework for Inertial-based Navigation Part I: Rigid Motion Representation and Computation
Feb 24, 2021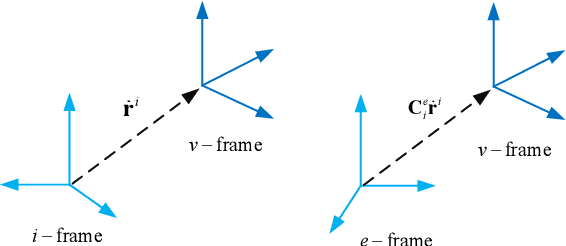
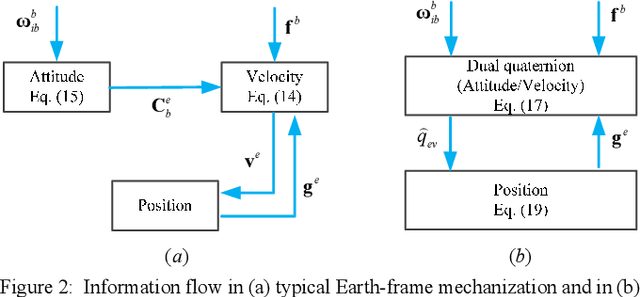
Strapdown inertial navigation research involves the parameterization and computation of the attitude, velocity and position of a rigid body in a chosen reference frame. The community has long devoted to finding the most concise and efficient representation for the strapdown inertial navigation system (INS). The current work is motivated by simplifying the existing dual quaternion representation of the kinematic model. This paper proposes a compact and elegant representation of the body's attitude, velocity and position, with the aid of a devised trident quaternion tool in which the position is accounted for by adding a second imaginary part to the dual quaternion. Eventually, the kinematics of strapdown INS are cohesively unified in one concise differential equation, which bears the same form as the classical attitude quaternion equation. In addition, the computation of this trident quaternion-based kinematic equation is implemented with the recently proposed functional iterative integration approach. Numerical results verify the analysis and show that incorporating the new representation into the functional iterative integration scheme achieves high inertial navigation computation accuracy as well.