 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Rotation-only Imaging Geometry: Rotation Estimation
Nov 16, 2025Structure from Motion (SfM) is a critical task in computer vision, aiming to recover the 3D scene structure and camera motion from a sequence of 2D images. The recent pose-only imaging geometry decouples 3D coordinates from camera poses and demonstrates significantly better SfM performance through pose adjustment. Continuing the pose-only perspective, this paper explores the critical relationship between the scene structures, rotation and translation. Notably, the translation can be expressed in terms of rotation, allowing us to condense the imaging geometry representation onto the rotation manifold. A rotation-only optimization framework based on reprojection error is proposed for both two-view and multi-view scenarios. The experiment results demonstrate superior accuracy and robustness performance over the current state-of-the-art rotation estimation methods, even comparable to multiple bundle adjustment iteration results. Hopefully, this work contributes to even more accurate, efficient and reliable 3D visual computing.
Generic Calibration: Pose Ambiguity/Linear Solution and Parametric-hybrid Pipeline
Aug 10, 2025Offline camera calibration techniques typically employ parametric or generic camera models. Selecting parametric models relies heavily on user experience, and an inappropriate camera model can significantly affect calibration accuracy. Meanwhile, generic calibration methods involve complex procedures and cannot provide traditional intrinsic parameters. This paper reveals a pose ambiguity in the pose solutions of generic calibration methods that irreversibly impacts subsequent pose estimation. A linear solver and a nonlinear optimization are proposed to address this ambiguity issue. Then a global optimization hybrid calibration method is introduced to integrate generic and parametric models together, which improves extrinsic parameter accuracy of generic calibration and mitigates overfitting and numerical instability in parametric calibration. Simulation and real-world experimental results demonstrate that the generic-parametric hybrid calibration method consistently excels across various lens types and noise contamination, hopefully serving as a reliable and accurate solution for camera calibration in complex scenarios.
An Immediate Update Strategy of Multi-State Constraint Kalman Filter
Nov 04, 2024



The lightweight Multi-state Constraint Kalman Filter (MSCKF) has been well-known for its high efficiency, in which the delayed update has been usually adopted since its proposal. This work investigates the immediate update strategy of MSCKF based on timely reconstructed 3D feature points and measurement constraints. The differences between the delayed update and the immediate update are theoretically analyzed in detail. It is found that the immediate update helps construct more observation constraints and employ more filtering updates than the delayed update, which improves the linearization point of the measurement model and therefore enhances the estimation accuracy. Numerical simulations and experiments show that the immediate update strategy significantly enhances MSCKF even with a small amount of feature observations.
Visual-inertial state estimation based on Chebyshev polynomial optimization
Apr 01, 2024



This paper proposes an innovative state estimation method for visual-inertial fusion based on Chebyshev polynomial optimization. Specifically, the pose is modeled as a Chebyshev polynomial of a certain order, and its time derivatives are used to calculate linear acceleration and angular velocity, which, along with inertial measurements, constitute dynamic constraints. This is coupled with a visual measurement model to construct a visual-inertial bundle adjustment formulation. Simulation and public dataset experiments show that the proposed method has better accuracy than the discrete-form preintegration method.
Linear Relative Pose Estimation Founded on Pose-only Imaging Geometry
Jan 24, 2024How to efficiently and accurately handle image matching outliers is a critical issue in two-view relative estimation. The prevailing RANSAC method necessitates that the minimal point pairs be inliers. This paper introduces a linear relative pose estimation algorithm for n $( n \geq 6$) point pairs, which is founded on the recent pose-only imaging geometry to filter out outliers by proper reweighting. The proposed algorithm is able to handle planar degenerate scenes, and enhance robustness and accuracy in the presence of a substantial ratio of outliers. Specifically, we embed the linear global translation (LiGT) constraint into the strategies of iteratively reweighted least-squares (IRLS) and RANSAC so as to realize robust outlier removal. Simulations and real tests of the Strecha dataset show that the proposed algorithm achieves relative rotation accuracy improvement of 2 $\sim$ 10 times in face of as large as 80% outliers.
Clifford Algebra-Based Iterated Extended Kalman Filter with Application to Low-Cost INS/GNSS Navigation
Nov 15, 2023



The traditional GNSS-aided inertial navigation system (INS) usually exploits the extended Kalman filter (EKF) for state estimation, and the initial attitude accuracy is key to the filtering performance. To spare the reliance on the initial attitude, this work generalizes the previously proposed trident quaternion within the framework of Clifford algebra to represent the extended pose, IMU biases and lever arms on the Lie group. Consequently, a quasi-group-affine system is established for the low-cost INS/GNSS integrated navigation system, and the right-error Clifford algebra-based EKF (Clifford-RQEKF) is accordingly developed. The iterated filtering approach is further applied to significantly improve the performances of the Clifford-RQEKF and the previously proposed trident quaternion-based EKFs. Numerical simulations and experiments show that all iterated filtering approaches fulfill the fast and global convergence without the prior attitude information, whereas the iterated Clifford-RQEKF performs much better than the others under especially large IMU biases.
Inertial-based Navigation by Polynomial Optimization: Inertial-Magnetic Attitude Estimation
May 17, 2023



Inertial-based navigation refers to the navigation methods or systems that have inertial information or sensors as the core part and integrate a spectrum of other kinds of sensors for enhanced performance. Through a series of papers, the authors attempt to explore information blending of inertial-based navigation by a polynomial optimization method. The basic idea is to model rigid motions as finite-order polynomials and then attacks the involved navigation problems by optimally solving their coefficients, taking into considerations the constraints posed by inertial sensors and others. In the current paper, a continuous-time attitude estimation approach is proposed, which transforms the attitude estimation into a constant parameter determination problem by the polynomial optimization. Specifically, the continuous attitude is first approximated by a Chebyshev polynomial, of which the unknown Chebyshev coefficients are determined by minimizing the weighted residuals of initial conditions, dynamics and measurements. We apply the derived estimator to the attitude estimation with the magnetic and inertial sensors. Simulation and field tests show that the estimator has much better stability and faster convergence than the traditional extended Kalman filter does, especially in the challenging large initial state error scenarios.
Investigation of Enhanced Inertial Navigation Algorithms by Functional Iteration
Feb 12, 2023



The defects of the traditional strapdown inertial navigation algorithms become well acknowledged and the enhanced traditional algorithms were quite recently proposed trying to mitigate both theoretical and algorithmic defects. In this paper, the accuracies of the traditional algorithms, the enhanced algorithms, and the velocity algorithm based on the velocity translation vector are re-investigated in the common case of two samples, for the first time against the true reference provided by the functional iteration approach that has provable convergence and essentially reduces the noncommutativity errors to machine precision. Notably, the analyses by the help of MATLAB symbolic toolbox reveal the marginal effect of the enhanced algorithms, and the error orders of all algorithms analyzed against functional iteration are consistent with the existing literatures. Numerical results under coning motions agree with analyses that the enhanced algorithms have little significant accuracy improvement over the traditional algorithms, while the functional iteration approach possesses significant accuracy superiority even in sustained lowly dynamic conditions.
iNavFIter-M: Matrix Formulation of Functional Iteration for Inertial Navigation Computation
Nov 17, 2022



The acquisition of attitude, velocity, and position is an essential task in the field of inertial navigation, achieved by integrating the measurements from inertial sensors. Recently, the ultra-precision inertial navigation computation has been tackled by the functional iteration approach (iNavFIter) that drives the non-commutativity errors almost to the computer truncation error level. This paper proposes a computationally efficient matrix formulation of the functional iteration approach, named the iNavFIter-M. The Chebyshev polynomial coefficients in two consecutive iterations are explicitly connected through the matrix formulation, in contrast to the implicit iterative relationship in the original iNavFIter. By so doing, it allows a straightforward algorithmic implementation and a number of matrix factors can be pre-calculated for more efficient computation. Numerical results demonstrate that the proposed iNavFIter-M algorithm is able to achieve the same high computation accuracy as the original iNavFIter does, at the computational cost comparable to the typical two-sample algorithm. The iNavFIter-M algorithm is also implemented on a FPGA board to demonstrate its potential in real time applications.
ChevOpt: Continuous-time State Estimation by Chebyshev Polynomial Optimization
Jan 15, 2022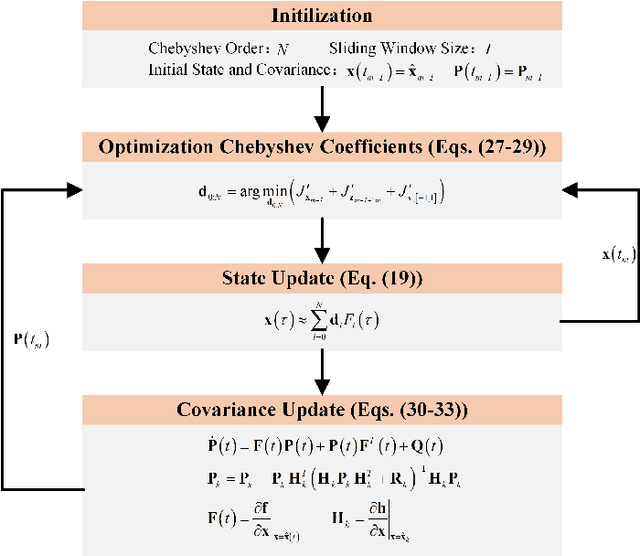
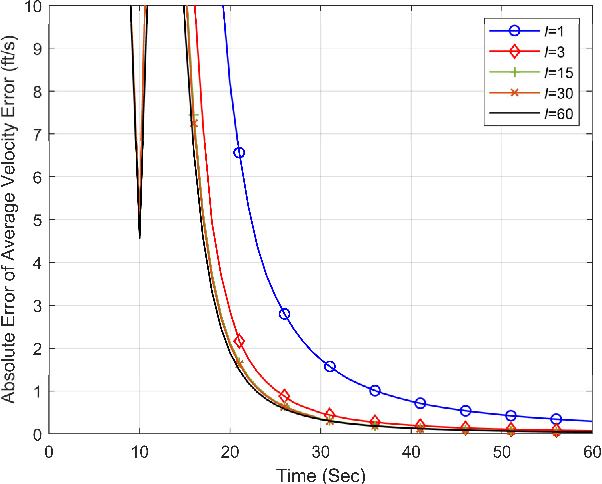
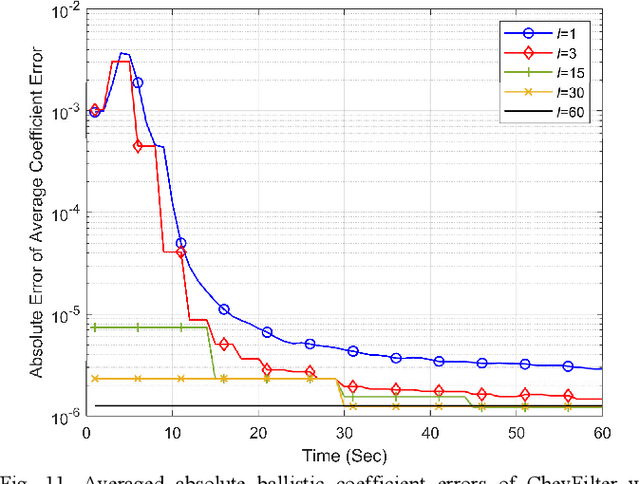
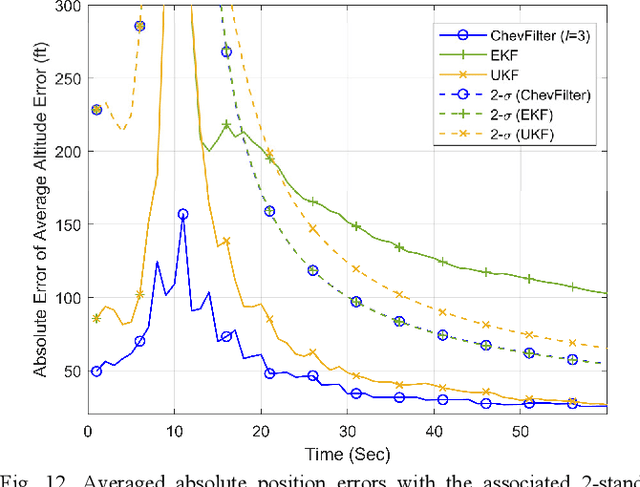
In this paper, a new framework for continuous-time maximum a posteriori estimation based on the Chebyshev polynomial optimization (ChevOpt) is proposed, which transforms the nonlinear continuous-time state estimation into a problem of constant parameter optimization. Specifically, the time-varying system state is represented by a Chebyshev polynomial and the unknown Chebyshev coefficients are optimized by minimizing the weighted sum of the prior, dynamics and measurements. The proposed ChevOpt is an optimal continuous-time estimation in the least squares sense and needs a batch processing. A recursive sliding-window version is proposed as well to meet the requirement of real-time applications. Comparing with the well-known Gaussian filters, the ChevOpt better resolves the nonlinearities in both dynamics and measurements. Numerical results of demonstrative examples show that the proposed ChevOpt achieves remarkably improved accuracy over the extended/unscented Kalman filters and RTS smoother, close to the Cramer-Rao lower bound.