 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreamlining Biomedical Research with Specialized LLMs
Apr 15, 2025In this paper, we propose a novel system that integrates state-of-the-art, domain-specific large language models with advanced information retrieval techniques to deliver comprehensive and context-aware responses. Our approach facilitates seamless interaction among diverse components, enabling cross-validation of outputs to produce accurate, high-quality responses enriched with relevant data, images, tables, and other modalities. We demonstrate the system's capability to enhance response precision by leveraging a robust question-answering model, significantly improving the quality of dialogue generation. The system provides an accessible platform for real-time, high-fidelity interactions, allowing users to benefit from efficient human-computer interaction, precise retrieval, and simultaneous access to a wide range of literature and data. This dramatically improves the research efficiency of professionals in the biomedical and pharmaceutical domains and facilitates faster, more informed decision-making throughout the R\&D process. Furthermore, the system proposed in this paper is available at https://synapse-chat.patsnap.com.
Collision-free Trajectory Planning for Autonomous Surface Vehicle
May 20, 2020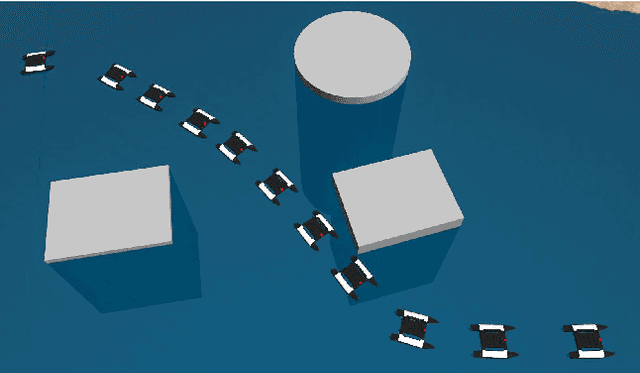
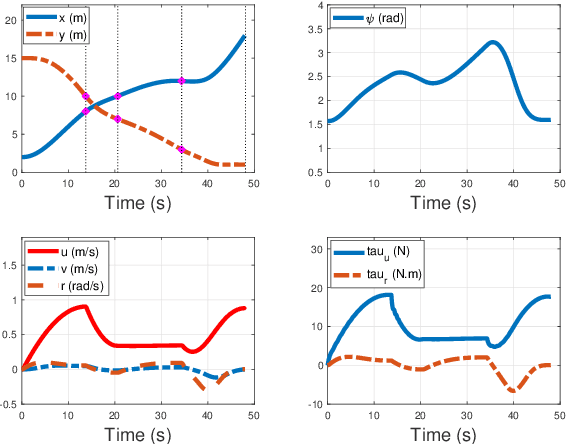
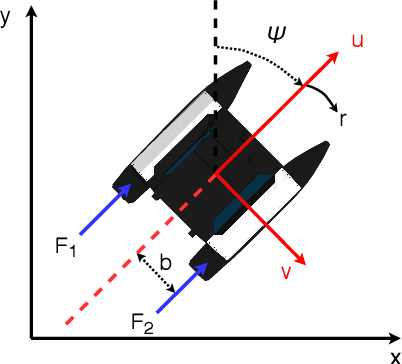
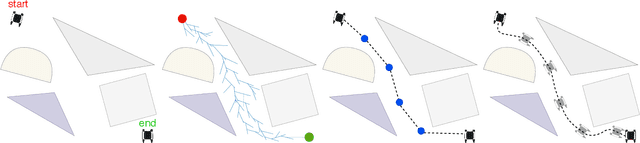
In this paper, we propose an efficient and accurate method for autonomous surface vehicles to generate a smooth and collision-free trajectory considering its dynamics constraints. We decouple the trajectory planning problem as a front-end feasible path searching and a back-end kinodynamic trajectory optimization. Firstly, we model the type of two-thrusts under-actuated surface vessel. Then we adopt a sampling-based path searching to find an asymptotic optimal path through the obstacle-surrounding environment and extract several waypoints from it. We apply a numerical optimization method in the back-end to generate the trajectory. From the perspective of security in the field voyage, we propose the sailing corridor method to guarantee the trajectory away from obstacles. Moreover, considering limited fuel ASV carrying, we design a numerical objective function which can optimize a fuel-saving trajectory. Finally, we validate and compare the proposed method in simulation environments and the results fit our expected trajectory.