 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainable AI for Accelerated Microstructure Imaging: A SHAP-Guided Protocol on the Connectome 2.0 scanner
Sep 11, 2025The diffusion MRI Neurite Exchange Imaging model offers a promising framework for probing gray matter microstructure by estimating parameters such as compartment sizes, diffusivities, and inter-compartmental water exchange time. However, existing protocols require long scan times. This study proposes a reduced acquisition scheme for the Connectome 2.0 scanner that preserves model accuracy while substantially shortening scan duration. We developed a data-driven framework using explainable artificial intelligence with a guided recursive feature elimination strategy to identify an optimal 8-feature subset from a 15-feature protocol. The performance of this optimized protocol was validated in vivo and benchmarked against the full acquisition and alternative reduction strategies. Parameter accuracy, preservation of anatomical contrast, and test-retest reproducibility were assessed. The reduced protocol yielded parameter estimates and cortical maps comparable to the full protocol, with low estimation errors in synthetic data and minimal impact on test-retest variability. Compared to theory-driven and heuristic reduction schemes, the optimized protocol demonstrated superior robustness, reducing the deviation in water exchange time estimates by over two-fold. In conclusion, this hybrid optimization framework enables viable imaging of neurite exchange in 14 minutes without loss of parameter fidelity. This approach supports the broader application of exchange-sensitive diffusion magnetic resonance imaging in neuroscience and clinical research, and offers a generalizable method for designing efficient acquisition protocols in biophysical parameter mapping.
Multiple Lane Detection Algorithm Based on Optimised Dense Disparity Map Estimation
Aug 28, 2018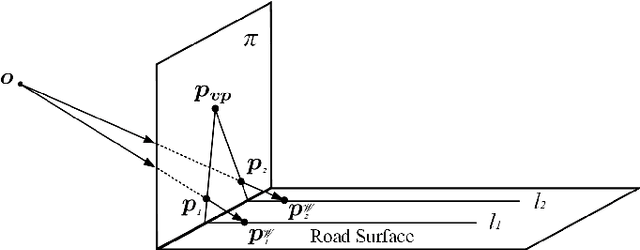
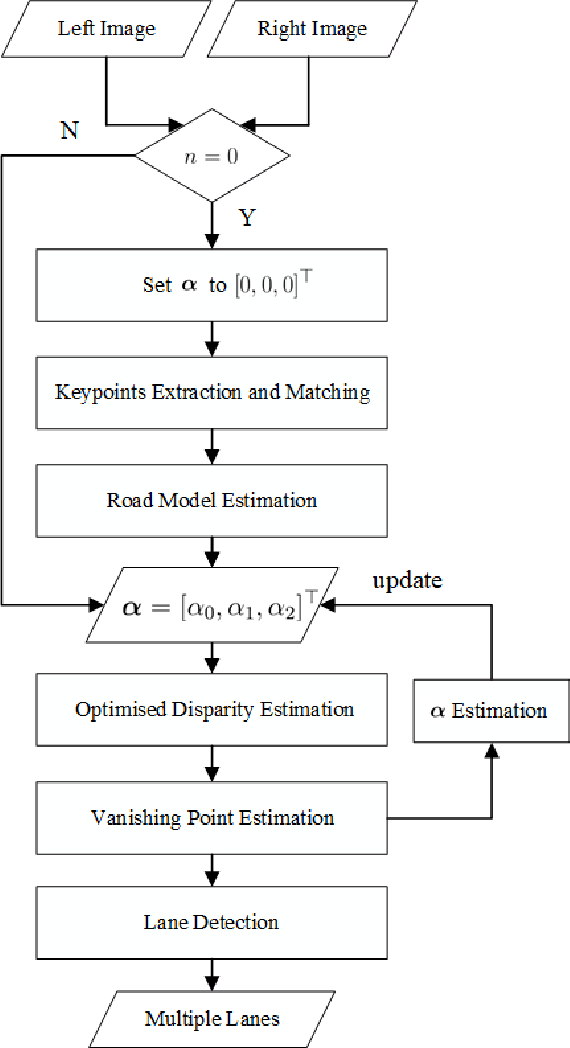

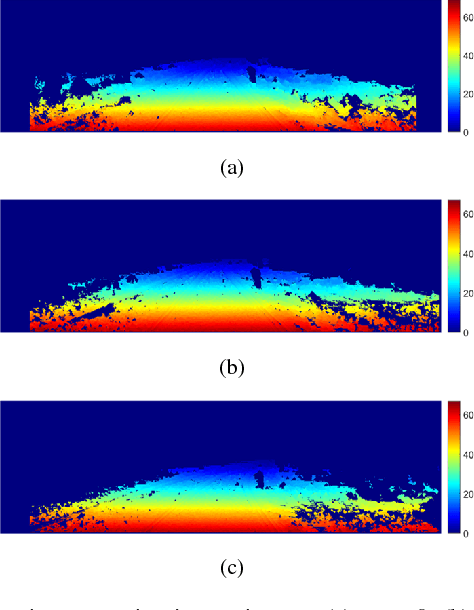
Lane detection is very important for self-driving vehicles. In recent years, computer stereo vision has been prevalently used to enhance the accuracy of the lane detection systems. This paper mainly presents a multiple lane detection algorithm developed based on optimised dense disparity map estimation, where the disparity information obtained at time t_{n} is utilised to optimise the process of disparity estimation at time t_{n+1}. This is achieved by estimating the road model at time t_{n} and then controlling the search range for the disparity estimation at time t_{n+1}. The lanes are then detected using our previously published algorithm, where the vanishing point information is used to model the lanes. The experimental results illustrate that the runtime of the disparity estimation is reduced by around 37% and the accuracy of the lane detection is about 99%.