 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContentV: Efficient Training of Video Generation Models with Limited Compute
Jun 05, 2025Recent advances in video generation demand increasingly efficient training recipes to mitigate escalating computational costs. In this report, we present ContentV, an 8B-parameter text-to-video model that achieves state-of-the-art performance (85.14 on VBench) after training on 256 x 64GB Neural Processing Units (NPUs) for merely four weeks. ContentV generates diverse, high-quality videos across multiple resolutions and durations from text prompts, enabled by three key innovations: (1) A minimalist architecture that maximizes reuse of pre-trained image generation models for video generation; (2) A systematic multi-stage training strategy leveraging flow matching for enhanced efficiency; and (3) A cost-effective reinforcement learning with human feedback framework that improves generation quality without requiring additional human annotations. All the code and models are available at: https://contentv.github.io.
Adversarial Sensor Attack on LiDAR-based Perception in Autonomous Driving
Aug 20, 2019
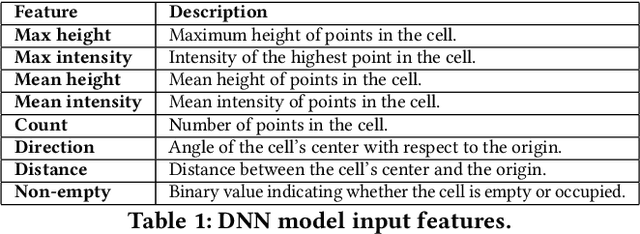

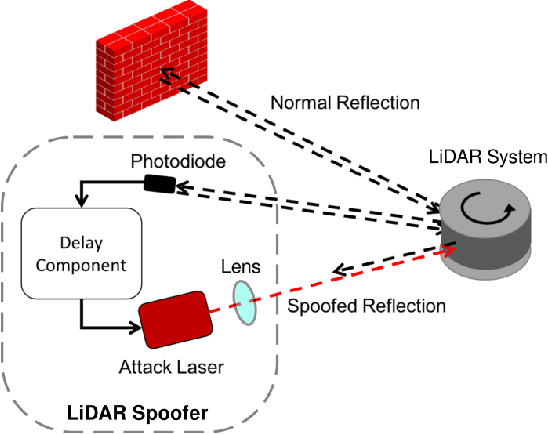
In Autonomous Vehicles (AVs), one fundamental pillar is perception, which leverages sensors like cameras and LiDARs (Light Detection and Ranging) to understand the driving environment. Due to its direct impact on road safety, multiple prior efforts have been made to study its the security of perception systems. In contrast to prior work that concentrates on camera-based perception, in this work we perform the first security study of LiDAR-based perception in AV settings, which is highly important but unexplored. We consider LiDAR spoofing attacks as the threat model and set the attack goal as spoofing obstacles close to the front of a victim AV. We find that blindly applying LiDAR spoofing is insufficient to achieve this goal due to the machine learning-based object detection process. Thus, we then explore the possibility of strategically controlling the spoofed attack to fool the machine learning model. We formulate this task as an optimization problem and design modeling methods for the input perturbation function and the objective function. We also identify the inherent limitations of directly solving the problem using optimization and design an algorithm that combines optimization and global sampling, which improves the attack success rates to around 75%. As a case study to understand the attack impact at the AV driving decision level, we construct and evaluate two attack scenarios that may damage road safety and mobility. We also discuss defense directions at the AV system, sensor, and machine learning model levels.