 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSGM-SLAM: Scene Graph Matching for Data-Efficient Distributed SLAM
Jun 15, 2026We introduce a data-efficient distributed Simultaneous Localization and Mapping (SLAM) framework designed for a team of robots equipped with LiDAR, cameras, and inertial sensors. Our framework uses scene graph matching to identify inter-robot measurement constraints. Unlike prior approaches that rely on feature-level matching, our framework is the first to perform scene graph matching using only object labels and centroids. Our approach constructs a scene graph by using fused RGB-LiDAR point clouds to generate both a semantically segmented point cloud layer, and a layer of discrete bounded objects, to accompany estimated robot trajectories. Scene graph matching is performed collaboratively through exchanging and matching object data with neighboring robots. To maximize communication efficiency, we utilize a multi-step data exchange and optimization process. We demonstrate the effectiveness and efficiency of our approach using both simulation and real-world datasets collected by legged robots in indoor and outdoor environments.
Variable-Resolution Virtual Maps for Autonomous Exploration with Unmanned Surface Vehicles (USVs)
Mar 24, 2026Autonomous exploration by unmanned surface vehicles (USVs) in near-shore waters requires reliable localisation and consistent mapping over extended areas, but this is challenged by GNSS degradation, environment-induced localisation uncertainty, and limited on-board computation. Virtual map-based methods explicitly model localisation and mapping uncertainty by tightly coupling factor-graph SLAM with a map uncertainty criterion. However, their storage and computational costs scale poorly with fixed-resolution workspace discretisations, leading to inefficiency in large near-shore environments. Moreover, overvaluing feature-sparse open-water regions can increase the risk of SLAM failure as a result of imbalance between exploration and exploitation. To address these limitations, we propose a Variable-Resolution Virtual Map (VRVM), a computationally efficient method for representing map uncertainty using bivariate Gaussian virtual landmarks placed in the cells of an adaptive quadtree. The adaptive quadtree enables an area-weighted uncertainty representation that keeps coarse, far-field virtual landmarks deliberately uncertain while allocating higher resolution to information-dense regions, and reduces the sensitivity of the map valuation to local refinements of the tree. An expectation-maximisation (EM) planner is adopted to evaluate pose and map uncertainty along frontiers using the VRVM, balancing exploration and exploitation. We evaluate VRVM against several state-of-the-art exploration algorithms in the VRX Gazebo simulator, using a realistic marina environment across different testing scenarios with an increasing level of exploration difficulty. The results indicate that our method offers safer behaviour and better utilisation of on-board computation in GNSS-degraded near-shore environments.
Underwater Dense Mapping with the First Compact 3D Sonar
Oct 21, 2025In the past decade, the adoption of compact 3D range sensors, such as LiDARs, has driven the developments of robust state-estimation pipelines, making them a standard sensor for aerial, ground, and space autonomy. Unfortunately, poor propagation of electromagnetic waves underwater, has limited the visibility-independent sensing options of underwater state-estimation to acoustic range sensors, which provide 2D information including, at-best, spatially ambiguous information. This paper, to the best of our knowledge, is the first study examining the performance, capacity, and opportunities arising from the recent introduction of the first compact 3D sonar. Towards that purpose, we introduce calibration procedures for extracting the extrinsics between the 3D sonar and a camera and we provide a study on acoustic response in different surfaces and materials. Moreover, we provide novel mapping and SLAM pipelines tested in deployments in underwater cave systems and other geometrically and acoustically challenging underwater environments. Our assessment showcases the unique capacity of 3D sonars to capture consistent spatial information allowing for detailed reconstructions and localization in datasets expanding to hundreds of meters. At the same time it highlights remaining challenges related to acoustic propagation, as found also in other acoustic sensors. Datasets collected for our evaluations would be released and shared with the community to enable further research advancements.
DRACo-SLAM2: Distributed Robust Acoustic Communication-efficient SLAM for Imaging Sonar EquippedUnderwater Robot Teams with Object Graph Matching
Jul 31, 2025



We present DRACo-SLAM2, a distributed SLAM framework for underwater robot teams equipped with multibeam imaging sonar. This framework improves upon the original DRACo-SLAM by introducing a novel representation of sonar maps as object graphs and utilizing object graph matching to achieve time-efficient inter-robot loop closure detection without relying on prior geometric information. To better-accommodate the needs and characteristics of underwater scan matching, we propose incremental Group-wise Consistent Measurement Set Maximization (GCM), a modification of Pairwise Consistent Measurement Set Maximization (PCM), which effectively handles scenarios where nearby inter-robot loop closures share similar registration errors. The proposed approach is validated through extensive comparative analyses on simulated and real-world datasets.
MAC: Maximizing Algebraic Connectivity for Graph Sparsification
Mar 28, 2024



Simultaneous localization and mapping (SLAM) is a critical capability in autonomous navigation, but memory and computational limits make long-term application of common SLAM techniques impractical; a robot must be able to determine what information should be retained and what can safely be forgotten. In graph-based SLAM, the number of edges (measurements) in a pose graph determines both the memory requirements of storing a robot's observations and the computational expense of algorithms deployed for performing state estimation using those observations, both of which can grow unbounded during long-term navigation. Motivated by these challenges, we propose a new general purpose approach to sparsify graphs in a manner that maximizes algebraic connectivity, a key spectral property of graphs which has been shown to control the estimation error of pose graph SLAM solutions. Our algorithm, MAC (for maximizing algebraic connectivity), is simple and computationally inexpensive, and admits formal post hoc performance guarantees on the quality of the solution that it provides. In application to the problem of pose-graph SLAM, we show on several benchmark datasets that our approach quickly produces high-quality sparsification results which retain the connectivity of the graph and, in turn, the quality of corresponding SLAM solutions.
Multi-Robot Autonomous Exploration and Mapping Under Localization Uncertainty with Expectation-Maximization
Mar 06, 2024


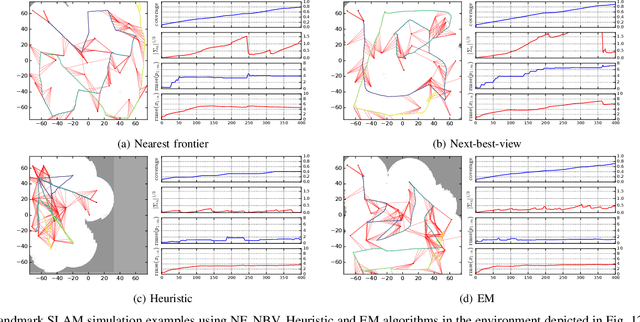
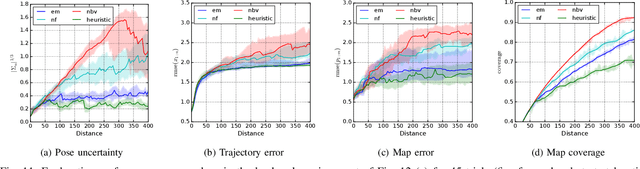
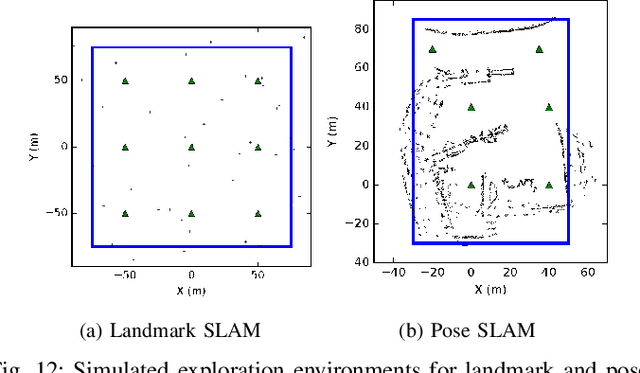
We propose an autonomous exploration algorithm designed for decentralized multi-robot teams, which takes into account map and localization uncertainties of range-sensing mobile robots. Virtual landmarks are used to quantify the combined impact of process noise and sensor noise on map uncertainty. Additionally, we employ an iterative expectation-maximization inspired algorithm to assess the potential outcomes of both a local robot's and its neighbors' next-step actions. To evaluate the effectiveness of our framework, we conduct a comparative analysis with state-of-the-art algorithms. The results of our experiments show the proposed algorithm's capacity to strike a balance between curbing map uncertainty and achieving efficient task allocation among robots.
Decentralized Multi-Robot Navigation for Autonomous Surface Vehicles with Distributional Reinforcement Learning
Feb 19, 2024



Collision avoidance algorithms for Autonomous Surface Vehicles (ASV) that follow the Convention on the International Regulations for Preventing Collisions at Sea (COLREGs) have been proposed in recent years. However, it may be difficult and unsafe to follow COLREGs in congested waters, where multiple ASVs are navigating in the presence of static obstacles and strong currents, due to the complex interactions. To address this problem, we propose a decentralized multi-ASV collision avoidance policy based on Distributional Reinforcement Learning, which considers the interactions among ASVs as well as with static obstacles and current flows. We evaluate the performance of the proposed Distributional RL based policy against a traditional RL-based policy and two classical methods, Artificial Potential Fields (APF) and Reciprocal Velocity Obstacles (RVO), in simulation experiments, which show that the proposed policy achieves superior performance in navigation safety, while requiring minimal travel time and energy. A variant of our framework that automatically adapts its risk sensitivity is also demonstrated to improve ASV safety in highly congested environments.
DRACo-SLAM: Distributed Robust Acoustic Communication-efficient SLAM for Imaging Sonar Equipped Underwater Robot Teams
Oct 03, 2022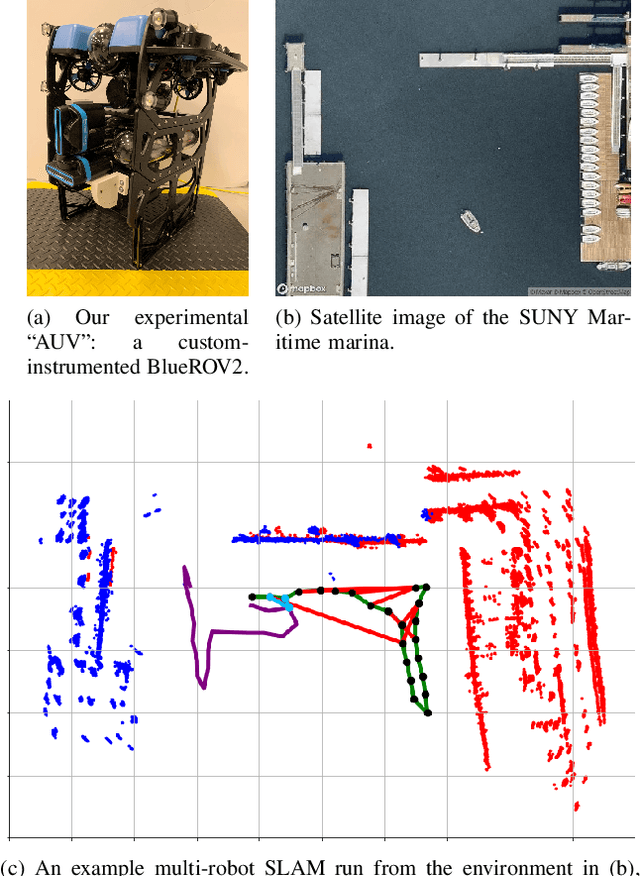
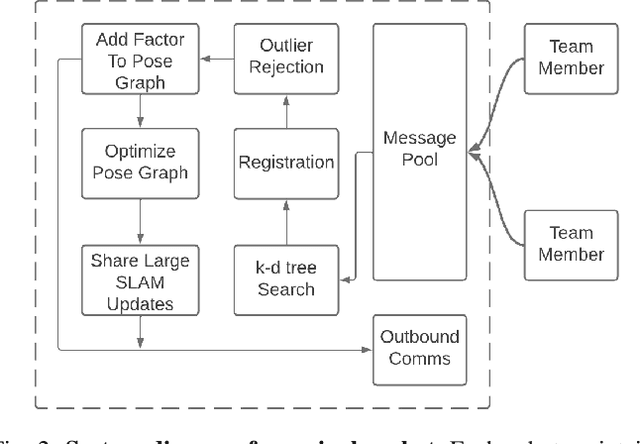
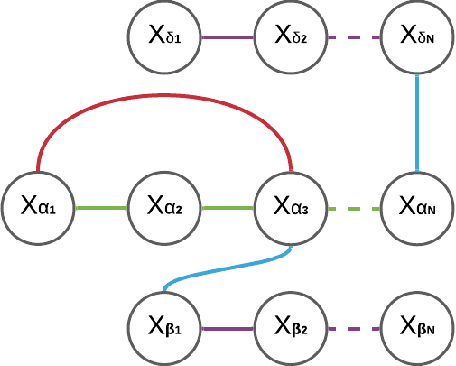
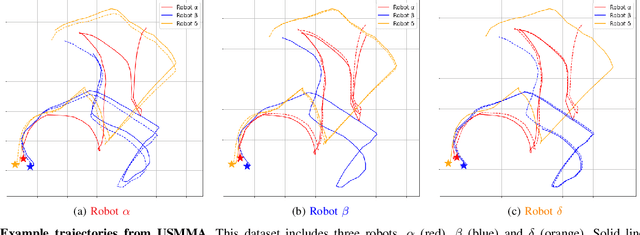
An essential task for a multi-robot system is generating a common understanding of the environment and relative poses between robots. Cooperative tasks can be executed only when a vehicle has knowledge of its own state and the states of the team members. However, this has primarily been achieved with direct rendezvous between underwater robots, via inter-robot ranging. We propose a novel distributed multi-robot simultaneous localization and mapping (SLAM) framework for underwater robots using imaging sonar-based perception. By passing only scene descriptors between robots, we do not need to pass raw sensor data unless there is a likelihood of inter-robot loop closure. We utilize pairwise consistent measurement set maximization (PCM), making our system robust to erroneous loop closures. The functionality of our system is demonstrated using two real-world datasets, one with three robots and another with two robots. We show that our system effectively estimates the trajectories of the multi-robot system and keeps the bandwidth requirements of inter-robot communication low. To our knowledge, this paper describes the first instance of multi-robot SLAM using real imaging sonar data (which we implement offline, using simulated communication). Code link: https://github.com/jake3991/DRACo-SLAM.
Virtual Maps for Autonomous Exploration of Cluttered Underwater Environments
Feb 16, 2022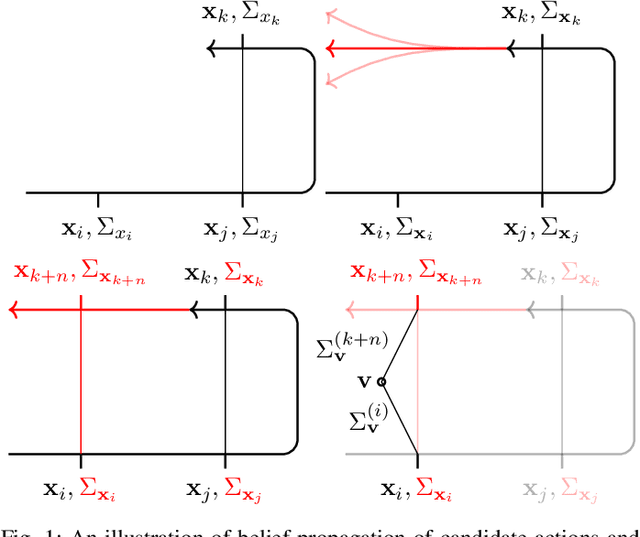
We consider the problem of autonomous mobile robot exploration in an unknown environment, taking into account a robot's coverage rate, map uncertainty, and state estimation uncertainty. This paper presents a novel exploration framework for underwater robots operating in cluttered environments, built upon simultaneous localization and mapping (SLAM) with imaging sonar. The proposed system comprises path generation, place recognition forecasting, belief propagation and utility evaluation using a virtual map, which estimates the uncertainty associated with map cells throughout a robot's workspace. We evaluate the performance of this framework in simulated experiments, showing that our algorithm maintains a high coverage rate during exploration while also maintaining low mapping and localization error. The real-world applicability of our framework is also demonstrated on an underwater remotely operated vehicle (ROV) exploring a harbor environment.
Zero-Shot Reinforcement Learning on Graphs for Autonomous Exploration Under Uncertainty
May 11, 2021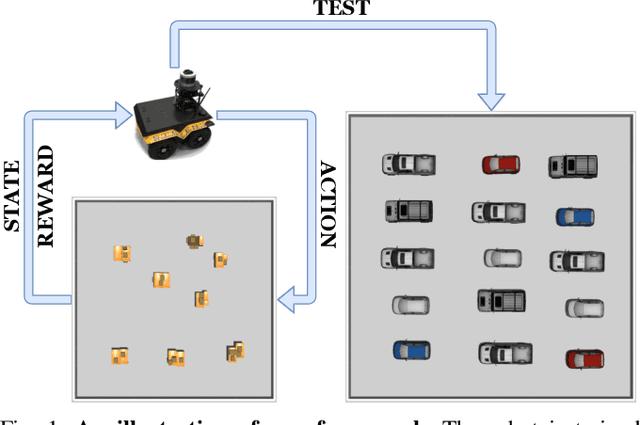

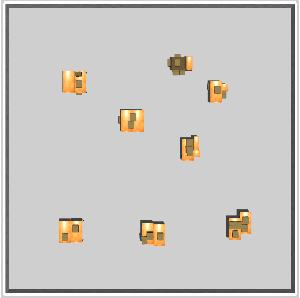
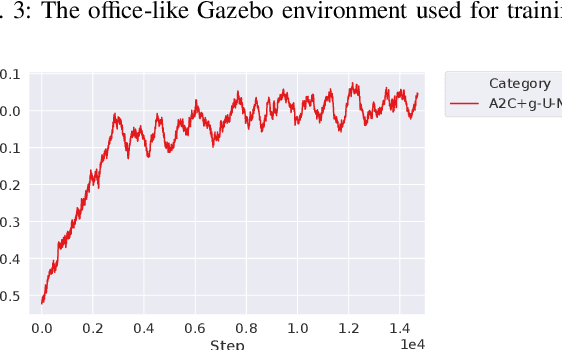
This paper studies the problem of autonomous exploration under localization uncertainty for a mobile robot with 3D range sensing. We present a framework for self-learning a high-performance exploration policy in a single simulation environment, and transferring it to other environments, which may be physical or virtual. Recent work in transfer learning achieves encouraging performance by domain adaptation and domain randomization to expose an agent to scenarios that fill the inherent gaps in sim2sim and sim2real approaches. However, it is inefficient to train an agent in environments with randomized conditions to learn the important features of its current state. An agent can use domain knowledge provided by human experts to learn efficiently. We propose a novel approach that uses graph neural networks in conjunction with deep reinforcement learning, enabling decision-making over graphs containing relevant exploration information provided by human experts to predict a robot's optimal sensing action in belief space. The policy, which is trained only in a single simulation environment, offers a real-time, scalable, and transferable decision-making strategy, resulting in zero-shot transfer to other simulation environments and even real-world environments.