 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAndroTMem: From Interaction Trajectories to Anchored Memory in Long-Horizon GUI Agents
Mar 19, 2026Long-horizon GUI agents are a key step toward real-world deployment, yet effective interaction memory under prevailing paradigms remains under-explored. Replaying full interaction sequences is redundant and amplifies noise, while summaries often erase dependency-critical information and traceability. We present AndroTMem, a diagnostic framework for anchored memory in long-horizon Android GUI agents. Its core benchmark, AndroTMem-Bench, comprises 1,069 tasks with 34,473 interaction steps (avg. 32.1 per task, max. 65). We evaluate agents with TCR (Task Complete Rate), focusing on tasks whose completion requires carrying forward critical intermediate state; AndroTMem-Bench is designed to enforce strong step-to-step causal dependencies, making sparse yet essential intermediate states decisive for downstream actions and centering interaction memory in evaluation. Across open- and closed-source GUI agents, we observe a consistent pattern: as interaction sequences grow longer, performance drops are driven mainly by within-task memory failures, not isolated perception errors or local action mistakes. Guided by this diagnosis, we propose Anchored State Memory (ASM), which represents interaction sequences as a compact set of causally linked intermediate-state anchors to enable subgoal-targeted retrieval and attribution-aware decision making. Across multiple settings and 12 evaluated GUI agents, ASM consistently outperforms full-sequence replay and summary-based baselines, improving TCR by 5%-30.16% and AMS by 4.93%-24.66%, indicating that anchored, structured memory effectively mitigates the interaction-memory bottleneck in long-horizon GUI tasks. The code, benchmark, and related resources are publicly available at [https://github.com/CVC2233/AndroTMem](https://github.com/CVC2233/AndroTMem).
You May Not Need Order in Time Series Forecasting
Oct 21, 2019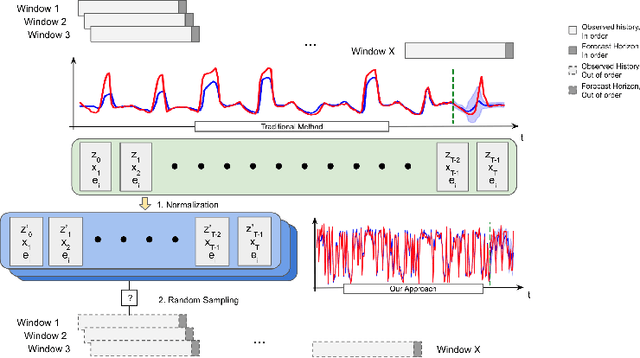
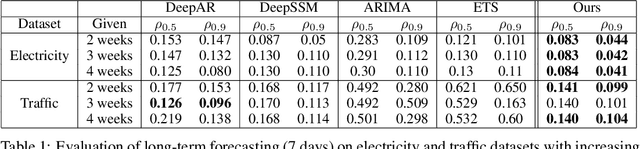
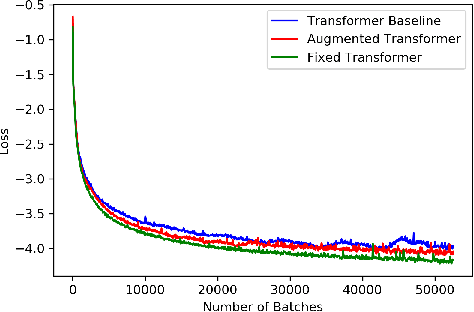
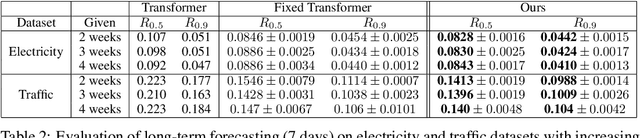
Time series forecasting with limited data is a challenging yet critical task. While transformers have achieved outstanding performances in time series forecasting, they often require many training samples due to the large number of trainable parameters. In this paper, we propose a training technique for transformers that prepares the training windows through random sampling. As input time steps need not be consecutive, the number of distinct samples increases from linearly to combinatorially many. By breaking the temporal order, this technique also helps transformers to capture dependencies among time steps in finer granularity. We achieve competitive results compared to the state-of-the-art on real-world datasets.