 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew Tokens Matter: Entropy Guided Attacks on Vision-Language Models
Dec 26, 2025Vision-language models (VLMs) achieve remarkable performance but remain vulnerable to adversarial attacks. Entropy, a measure of model uncertainty, is strongly correlated with the reliability of VLM. Prior entropy-based attacks maximize uncertainty at all decoding steps, implicitly assuming that every token contributes equally to generation instability. We show instead that a small fraction (about 20%) of high-entropy tokens, i.e., critical decision points in autoregressive generation, disproportionately governs output trajectories. By concentrating adversarial perturbations on these positions, we achieve semantic degradation comparable to global methods while using substantially smaller budgets. More importantly, across multiple representative VLMs, such selective attacks convert 35-49% of benign outputs into harmful ones, exposing a more critical safety risk. Remarkably, these vulnerable high-entropy forks recur across architecturally diverse VLMs, enabling feasible transferability (17-26% harmful rates on unseen targets). Motivated by these findings, we propose Entropy-bank Guided Adversarial attacks (EGA), which achieves competitive attack success rates (93-95%) alongside high harmful conversion, thereby revealing new weaknesses in current VLM safety mechanisms.
Unlocking Vision-Language Models for Video Anomaly Detection via Fine-Grained Prompting
Oct 02, 2025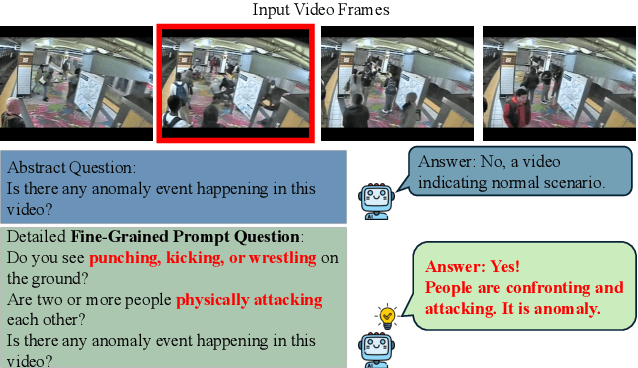
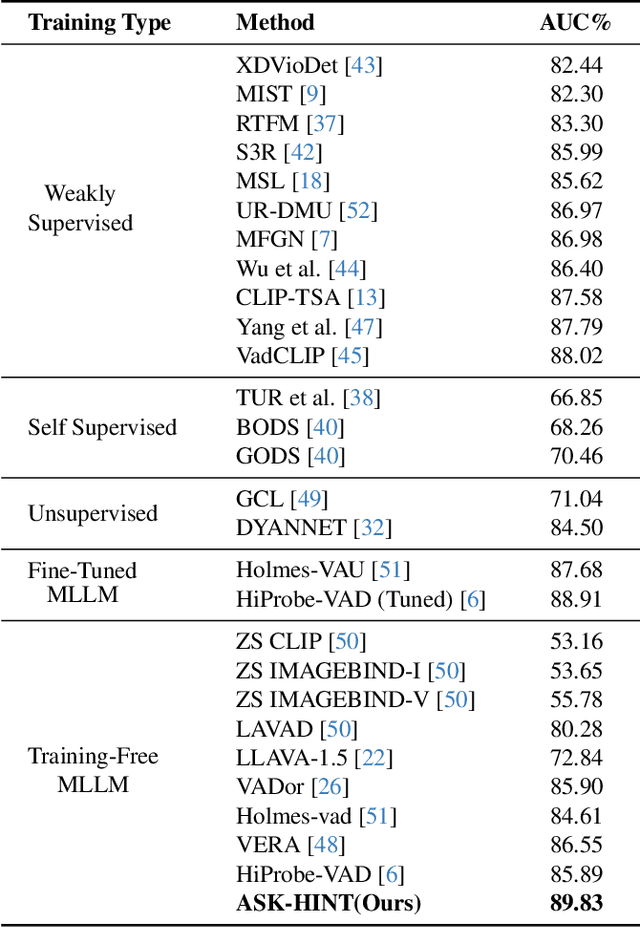
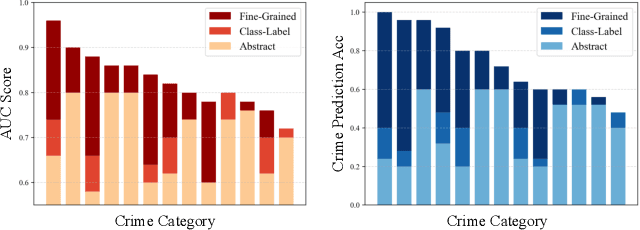
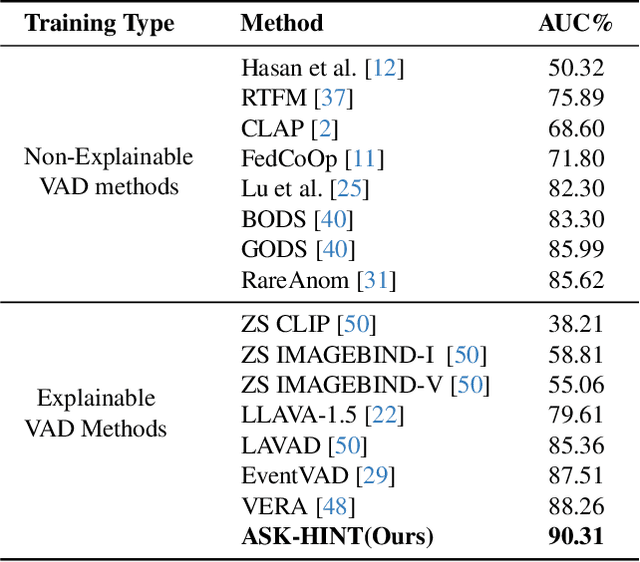
Prompting has emerged as a practical way to adapt frozen vision-language models (VLMs) for video anomaly detection (VAD). Yet, existing prompts are often overly abstract, overlooking the fine-grained human-object interactions or action semantics that define complex anomalies in surveillance videos. We propose ASK-Hint, a structured prompting framework that leverages action-centric knowledge to elicit more accurate and interpretable reasoning from frozen VLMs. Our approach organizes prompts into semantically coherent groups (e.g. violence, property crimes, public safety) and formulates fine-grained guiding questions that align model predictions with discriminative visual cues. Extensive experiments on UCF-Crime and XD-Violence show that ASK-Hint consistently improves AUC over prior baselines, achieving state-of-the-art performance compared to both fine-tuned and training-free methods. Beyond accuracy, our framework provides interpretable reasoning traces towards anomaly and demonstrates strong generalization across datasets and VLM backbones. These results highlight the critical role of prompt granularity and establish ASK-Hint as a new training-free and generalizable solution for explainable video anomaly detection.
Simple Radiology VLLM Test-time Scaling with Thought Graph Traversal
Jun 13, 2025



Test-time scaling offers a promising way to improve the reasoning performance of vision-language large models (VLLMs) without additional training. In this paper, we explore a simple but effective approach for applying test-time scaling to radiology report generation. Specifically, we introduce a lightweight Thought Graph Traversal (TGT) framework that guides the model to reason through organ-specific findings in a medically coherent order. This framework integrates structured medical priors into the prompt, enabling deeper and more logical analysis with no changes to the underlying model. To further enhance reasoning depth, we apply a reasoning budget forcing strategy that adjusts the model's inference depth at test time by dynamically extending its generation process. This simple yet powerful combination allows a frozen radiology VLLM to self-correct and generate more accurate, consistent chest X-ray reports. Our method outperforms baseline prompting approaches on standard benchmarks, and also reveals dataset biases through traceable reasoning paths. Code and prompts are open-sourced for reproducibility at https://github.com/glerium/Thought-Graph-Traversal.
Conditional Data Synthesis Augmentation
Apr 10, 2025Reliable machine learning and statistical analysis rely on diverse, well-distributed training data. However, real-world datasets are often limited in size and exhibit underrepresentation across key subpopulations, leading to biased predictions and reduced performance, particularly in supervised tasks such as classification. To address these challenges, we propose Conditional Data Synthesis Augmentation (CoDSA), a novel framework that leverages generative models, such as diffusion models, to synthesize high-fidelity data for improving model performance across multimodal domains including tabular, textual, and image data. CoDSA generates synthetic samples that faithfully capture the conditional distributions of the original data, with a focus on under-sampled or high-interest regions. Through transfer learning, CoDSA fine-tunes pre-trained generative models to enhance the realism of synthetic data and increase sample density in sparse areas. This process preserves inter-modal relationships, mitigates data imbalance, improves domain adaptation, and boosts generalization. We also introduce a theoretical framework that quantifies the statistical accuracy improvements enabled by CoDSA as a function of synthetic sample volume and targeted region allocation, providing formal guarantees of its effectiveness. Extensive experiments demonstrate that CoDSA consistently outperforms non-adaptive augmentation strategies and state-of-the-art baselines in both supervised and unsupervised settings.
Identifying and Mitigating Position Bias of Multi-image Vision-Language Models
Mar 18, 2025The evolution of Large Vision-Language Models (LVLMs) has progressed from single to multi-image reasoning. Despite this advancement, our findings indicate that LVLMs struggle to robustly utilize information across multiple images, with predictions significantly affected by the alteration of image positions. To further explore this issue, we introduce Position-wise Question Answering (PQA), a meticulously designed task to quantify reasoning capabilities at each position. Our analysis reveals a pronounced position bias in LVLMs: open-source models excel in reasoning with images positioned later but underperform with those in the middle or at the beginning, while proprietary models show improved comprehension for images at the beginning and end but struggle with those in the middle. Motivated by this, we propose SoFt Attention (SoFA), a simple, training-free approach that mitigates this bias by employing linear interpolation between inter-image causal attention and bidirectional counterparts. Experimental results demonstrate that SoFA reduces position bias and enhances the reasoning performance of existing LVLMs.
Black Sheep in the Herd: Playing with Spuriously Correlated Attributes for Vision-Language Recognition
Feb 19, 2025



Few-shot adaptation for Vision-Language Models (VLMs) presents a dilemma: balancing in-distribution accuracy with out-of-distribution generalization. Recent research has utilized low-level concepts such as visual attributes to enhance generalization. However, this study reveals that VLMs overly rely on a small subset of attributes on decision-making, which co-occur with the category but are not inherently part of it, termed spuriously correlated attributes. This biased nature of VLMs results in poor generalization. To address this, 1) we first propose Spurious Attribute Probing (SAP), identifying and filtering out these problematic attributes to significantly enhance the generalization of existing attribute-based methods; 2) We introduce Spurious Attribute Shielding (SAS), a plug-and-play module that mitigates the influence of these attributes on prediction, seamlessly integrating into various Parameter-Efficient Fine-Tuning (PEFT) methods. In experiments, SAP and SAS significantly enhance accuracy on distribution shifts across 11 datasets and 3 generalization tasks without compromising downstream performance, establishing a new state-of-the-art benchmark.
Generative Distribution Prediction: A Unified Approach to Multimodal Learning
Feb 10, 2025



Accurate prediction with multimodal data-encompassing tabular, textual, and visual inputs or outputs-is fundamental to advancing analytics in diverse application domains. Traditional approaches often struggle to integrate heterogeneous data types while maintaining high predictive accuracy. We introduce Generative Distribution Prediction (GDP), a novel framework that leverages multimodal synthetic data generation-such as conditional diffusion models-to enhance predictive performance across structured and unstructured modalities. GDP is model-agnostic, compatible with any high-fidelity generative model, and supports transfer learning for domain adaptation. We establish a rigorous theoretical foundation for GDP, providing statistical guarantees on its predictive accuracy when using diffusion models as the generative backbone. By estimating the data-generating distribution and adapting to various loss functions for risk minimization, GDP enables accurate point predictions across multimodal settings. We empirically validate GDP on four supervised learning tasks-tabular data prediction, question answering, image captioning, and adaptive quantile regression-demonstrating its versatility and effectiveness across diverse domains.
Speech Translation Refinement using Large Language Models
Jan 25, 2025



Recent advancements in large language models (LLMs) have demonstrated their remarkable capabilities across various language tasks. Inspired by the success of text-to-text translation refinement, this paper investigates how LLMs can improve the performance of speech translation by introducing a joint refinement process. Through the joint refinement of speech translation (ST) and automatic speech recognition (ASR) transcription via LLMs, the performance of the ST model is significantly improved in both training-free in-context learning and parameter-efficient fine-tuning scenarios. Additionally, we explore the effect of document-level context on refinement under the context-aware fine-tuning scenario. Experimental results on the MuST-C and CoVoST 2 datasets, which include seven translation tasks, demonstrate the effectiveness of the proposed approach using several popular LLMs including GPT-3.5-turbo, LLaMA3-8B, and Mistral-12B. Further analysis further suggests that jointly refining both transcription and translation yields better performance compared to refining translation alone. Meanwhile, incorporating document-level context significantly enhances refinement performance. We release our code and datasets on GitHub.
SimLabel: Consistency-Guided OOD Detection with Pretrained Vision-Language Models
Jan 20, 2025Detecting out-of-distribution (OOD) data is crucial in real-world machine learning applications, particularly in safety-critical domains. Existing methods often leverage language information from vision-language models (VLMs) to enhance OOD detection by improving confidence estimation through rich class-wise text information. However, when building OOD detection score upon on in-distribution (ID) text-image affinity, existing works either focus on each ID class or whole ID label sets, overlooking inherent ID classes' connection. We find that the semantic information across different ID classes is beneficial for effective OOD detection. We thus investigate the ability of image-text comprehension among different semantic-related ID labels in VLMs and propose a novel post-hoc strategy called SimLabel. SimLabel enhances the separability between ID and OOD samples by establishing a more robust image-class similarity metric that considers consistency over a set of similar class labels. Extensive experiments demonstrate the superior performance of SimLabel on various zero-shot OOD detection benchmarks. The proposed model is also extended to various VLM-backbones, demonstrating its good generalization ability. Our demonstration and implementation codes are available at: https://github.com/ShuZou-1/SimLabel.
Continuous-Time Digital Twin with Analogue Memristive Neural Ordinary Differential Equation Solver
Jun 12, 2024Digital twins, the cornerstone of Industry 4.0, replicate real-world entities through computer models, revolutionising fields such as manufacturing management and industrial automation. Recent advances in machine learning provide data-driven methods for developing digital twins using discrete-time data and finite-depth models on digital computers. However, this approach fails to capture the underlying continuous dynamics and struggles with modelling complex system behaviour. Additionally, the architecture of digital computers, with separate storage and processing units, necessitates frequent data transfers and Analogue-Digital (A/D) conversion, thereby significantly increasing both time and energy costs. Here, we introduce a memristive neural ordinary differential equation (ODE) solver for digital twins, which is capable of capturing continuous-time dynamics and facilitates the modelling of complex systems using an infinite-depth model. By integrating storage and computation within analogue memristor arrays, we circumvent the von Neumann bottleneck, thus enhancing both speed and energy efficiency. We experimentally validate our approach by developing a digital twin of the HP memristor, which accurately extrapolates its nonlinear dynamics, achieving a 4.2-fold projected speedup and a 41.4-fold projected decrease in energy consumption compared to state-of-the-art digital hardware, while maintaining an acceptable error margin. Additionally, we demonstrate scalability through experimentally grounded simulations of Lorenz96 dynamics, exhibiting projected performance improvements of 12.6-fold in speed and 189.7-fold in energy efficiency relative to traditional digital approaches. By harnessing the capabilities of fully analogue computing, our breakthrough accelerates the development of digital twins, offering an efficient and rapid solution to meet the demands of Industry 4.0.