 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Energy-Aware Reward Shaping: A Unified Lightweight Physics-Guided Methodology for Policy Optimization
Mar 12, 2026Deep reinforcement learning excels in continuous control but often requires extensive exploration, while physics-based models demand complete equations and suffer cubic complexity. This study proposes Hybrid Energy-Aware Reward Shaping (H-EARS), unifying potential-based reward shaping with energy-aware action regularization. H-EARS constrains action magnitude while balancing task-specific and energy-based potentials via functional decomposition, achieving linear complexity O(n) by capturing dominant energy components without full dynamics. We establish a theoretical foundation including: (1) functional independence for separate task/energy optimization; (2) energy-based convergence acceleration; (3) convergence guarantees under function approximation; and (4) approximate potential error bounds. Lyapunov stability connections are analyzed as heuristic guides. Experiments across baselines show improved convergence, stability, and energy efficiency. Vehicle simulations validate applicability in safety-critical domains under extreme conditions. Results confirm that integrating lightweight physics priors enhances model-free RL without complete system models, enabling transfer from lab research to industrial applications.
Innovative Tooth Segmentation Using Hierarchical Features and Bidirectional Sequence Modeling
Feb 25, 2026Tooth image segmentation is a cornerstone of dental digitization. However, traditional image encoders relying on fixed-resolution feature maps often lead to discontinuous segmentation and poor discrimination between target regions and background, due to insufficient modeling of environmental and global context. Moreover, transformer-based self-attention introduces substantial computational overhead because of its quadratic complexity (O(n^2)), making it inefficient for high-resolution dental images. To address these challenges, we introduce a three-stage encoder with hierarchical feature representation to capture scale-adaptive information in dental images. By jointly leveraging low-level details and high-level semantics through cross-scale feature fusion, the model effectively preserves fine structural information while maintaining strong contextual awareness. Furthermore, a bidirectional sequence modeling strategy is incorporated to enhance global spatial context understanding without incurring high computational cost. We validate our method on two dental datasets, with experimental results demonstrating its superiority over existing approaches. On the OralVision dataset, our model achieves a 1.1% improvement in mean intersection over union (mIoU).
* Accepted by Pattern Recognition
LLMIdxAdvis: Resource-Efficient Index Advisor Utilizing Large Language Model
Mar 10, 2025



Index recommendation is essential for improving query performance in database management systems (DBMSs) through creating an optimal set of indexes under specific constraints. Traditional methods, such as heuristic and learning-based approaches, are effective but face challenges like lengthy recommendation time, resource-intensive training, and poor generalization across different workloads and database schemas. To address these issues, we propose LLMIdxAdvis, a resource-efficient index advisor that uses large language models (LLMs) without extensive fine-tuning. LLMIdxAdvis frames index recommendation as a sequence-to-sequence task, taking target workload, storage constraint, and corresponding database environment as input, and directly outputting recommended indexes. It constructs a high-quality demonstration pool offline, using GPT-4-Turbo to synthesize diverse SQL queries and applying integrated heuristic methods to collect both default and refined labels. During recommendation, these demonstrations are ranked to inject database expertise via in-context learning. Additionally, LLMIdxAdvis extracts workload features involving specific column statistical information to strengthen LLM's understanding, and introduces a novel inference scaling strategy combining vertical scaling (via ''Index-Guided Major Voting'' and Best-of-N) and horizontal scaling (through iterative ''self-optimization'' with database feedback) to enhance reliability. Experiments on 3 OLAP and 2 real-world benchmarks reveal that LLMIdxAdvis delivers competitive index recommendation with reduced runtime, and generalizes effectively across different workloads and database schemas.
ImagineNav: Prompting Vision-Language Models as Embodied Navigator through Scene Imagination
Oct 13, 2024



Visual navigation is an essential skill for home-assistance robots, providing the object-searching ability to accomplish long-horizon daily tasks. Many recent approaches use Large Language Models (LLMs) for commonsense inference to improve exploration efficiency. However, the planning process of LLMs is limited within texts and it is difficult to represent the spatial occupancy and geometry layout only by texts. Both are important for making rational navigation decisions. In this work, we seek to unleash the spatial perception and planning ability of Vision-Language Models (VLMs), and explore whether the VLM, with only on-board camera captured RGB/RGB-D stream inputs, can efficiently finish the visual navigation tasks in a mapless manner. We achieve this by developing the imagination-powered navigation framework ImagineNav, which imagines the future observation images at valuable robot views and translates the complex navigation planning process into a rather simple best-view image selection problem for VLM. To generate appropriate candidate robot views for imagination, we introduce the Where2Imagine module, which is distilled to align with human navigation habits. Finally, to reach the VLM preferred views, an off-the-shelf point-goal navigation policy is utilized. Empirical experiments on the challenging open-vocabulary object navigation benchmarks demonstrates the superiority of our proposed system.
LLMTune: Accelerate Database Knob Tuning with Large Language Models
Apr 17, 2024



Database knob tuning is a critical challenge in the database community, aiming to optimize knob values to enhance database performance for specific workloads. DBMS often feature hundreds of tunable knobs, posing a significant challenge for DBAs to recommend optimal configurations. Consequently, many machine learning-based tuning methods have been developed to automate this process. Despite the introduction of various optimizers, practical applications have unveiled a new problem: they typically require numerous workload runs to achieve satisfactory performance, a process that is both time-consuming and resource-intensive. This inefficiency largely stems from the optimal configuration often being substantially different from the default setting, necessitating multiple iterations during tuning. Recognizing this, we argue that an effective starting point could significantly reduce redundant exploration in less efficient areas, thereby potentially speeding up the tuning process for the optimizers. Based on this assumption, we introduce LLMTune, a large language model-based configuration generator designed to produce an initial, high-quality configuration for new workloads. These generated configurations can then serve as starting points for various base optimizers, accelerating their tuning processes. To obtain training data for LLMTune's supervised fine-tuning, we have devised a new automatic data generation framework capable of efficiently creating a large number of <workload, configuration> pairs. We have conducted thorough experiments to evaluate LLMTune's effectiveness with different workloads, such as TPC-H and JOB. In comparison to leading methods, LLMTune demonstrates a quicker ability to identify superior configurations. For instance, with the challenging TPC-H workload, our LLMTune achieves a significant 15.6x speed-up ratio in finding the best-performing configurations.
Analyzing Worldwide Social Distancing through Large-Scale Computer Vision
Aug 27, 2020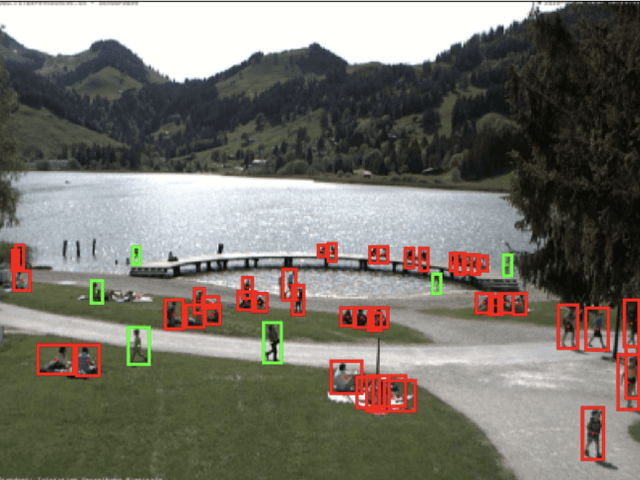
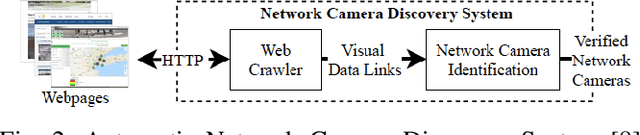
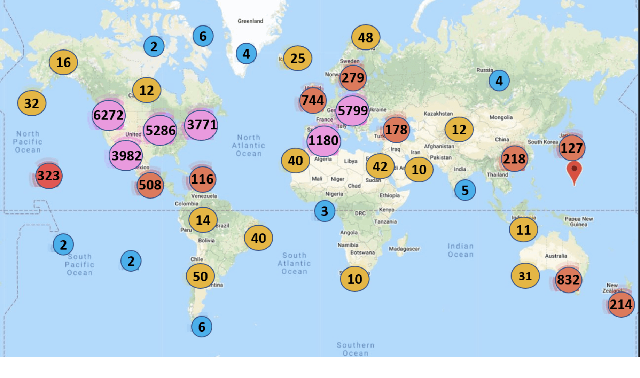
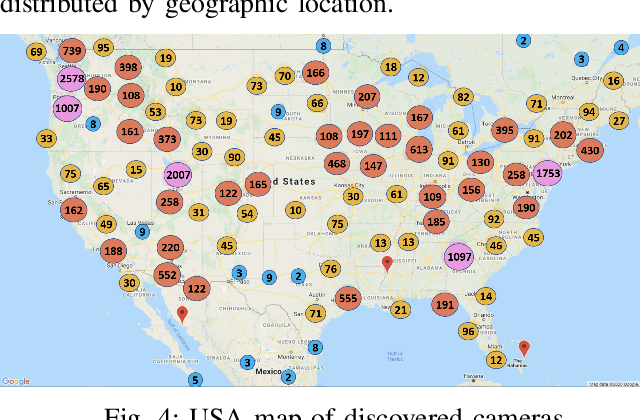
In order to contain the COVID-19 pandemic, countries around the world have introduced social distancing guidelines as public health interventions to reduce the spread of the disease. However, monitoring the efficacy of these guidelines at a large scale (nationwide or worldwide) is difficult. To make matters worse, traditional observational methods such as in-person reporting is dangerous because observers may risk infection. A better solution is to observe activities through network cameras; this approach is scalable and observers can stay in safe locations. This research team has created methods that can discover thousands of network cameras worldwide, retrieve data from the cameras, analyze the data, and report the sizes of crowds as different countries issued and lifted restrictions (also called ''lockdown''). We discover 11,140 network cameras that provide real-time data and we present the results across 15 countries. We collect data from these cameras beginning April 2020 at approximately 0.5TB per week. After analyzing 10,424,459 images from still image cameras and frames extracted periodically from video, the data reveals that the residents in some countries exhibited more activity (judged by numbers of people and vehicles) after the restrictions were lifted. In other countries, the amounts of activities showed no obvious changes during the restrictions and after the restrictions were lifted. The data further reveals whether people stay ''social distancing'', at least 6 feet apart. This study discerns whether social distancing is being followed in several types of locations and geographical locations worldwide and serve as an early indicator whether another wave of infections is likely to occur soon.