 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAM2Point: Segment Any 3D as Videos in Zero-shot and Promptable Manners
Aug 29, 2024



We introduce SAM2Point, a preliminary exploration adapting Segment Anything Model 2 (SAM 2) for zero-shot and promptable 3D segmentation. SAM2Point interprets any 3D data as a series of multi-directional videos, and leverages SAM 2 for 3D-space segmentation, without further training or 2D-3D projection. Our framework supports various prompt types, including 3D points, boxes, and masks, and can generalize across diverse scenarios, such as 3D objects, indoor scenes, outdoor environments, and raw sparse LiDAR. Demonstrations on multiple 3D datasets, e.g., Objaverse, S3DIS, ScanNet, Semantic3D, and KITTI, highlight the robust generalization capabilities of SAM2Point. To our best knowledge, we present the most faithful implementation of SAM in 3D, which may serve as a starting point for future research in promptable 3D segmentation. Online Demo: https://huggingface.co/spaces/ZiyuG/SAM2Point . Code: https://github.com/ZiyuGuo99/SAM2Point .
No Time to Train: Empowering Non-Parametric Networks for Few-shot 3D Scene Segmentation
Apr 05, 2024



To reduce the reliance on large-scale datasets, recent works in 3D segmentation resort to few-shot learning. Current 3D few-shot segmentation methods first pre-train models on 'seen' classes, and then evaluate their generalization performance on 'unseen' classes. However, the prior pre-training stage not only introduces excessive time overhead but also incurs a significant domain gap on 'unseen' classes. To tackle these issues, we propose a Non-parametric Network for few-shot 3D Segmentation, Seg-NN, and its Parametric variant, Seg-PN. Without training, Seg-NN extracts dense representations by hand-crafted filters and achieves comparable performance to existing parametric models. Due to the elimination of pre-training, Seg-NN can alleviate the domain gap issue and save a substantial amount of time. Based on Seg-NN, Seg-PN only requires training a lightweight QUEry-Support Transferring (QUEST) module, which enhances the interaction between the support set and query set. Experiments suggest that Seg-PN outperforms previous state-of-the-art method by +4.19% and +7.71% mIoU on S3DIS and ScanNet datasets respectively, while reducing training time by -90%, indicating its effectiveness and efficiency.
Point-Bind & Point-LLM: Aligning Point Cloud with Multi-modality for 3D Understanding, Generation, and Instruction Following
Sep 01, 2023



We introduce Point-Bind, a 3D multi-modality model aligning point clouds with 2D image, language, audio, and video. Guided by ImageBind, we construct a joint embedding space between 3D and multi-modalities, enabling many promising applications, e.g., any-to-3D generation, 3D embedding arithmetic, and 3D open-world understanding. On top of this, we further present Point-LLM, the first 3D large language model (LLM) following 3D multi-modal instructions. By parameter-efficient fine-tuning techniques, Point-LLM injects the semantics of Point-Bind into pre-trained LLMs, e.g., LLaMA, which requires no 3D instruction data, but exhibits superior 3D and multi-modal question-answering capacity. We hope our work may cast a light on the community for extending 3D point clouds to multi-modality applications. Code is available at https://github.com/ZiyuGuo99/Point-Bind_Point-LLM.
Less is More: Towards Efficient Few-shot 3D Semantic Segmentation via Training-free Networks
Aug 24, 2023To reduce the reliance on large-scale datasets, recent works in 3D segmentation resort to few-shot learning. Current 3D few-shot semantic segmentation methods first pre-train the models on `seen' classes, and then evaluate their generalization performance on `unseen' classes. However, the prior pre-training stage not only introduces excessive time overhead, but also incurs a significant domain gap on `unseen' classes. To tackle these issues, we propose an efficient Training-free Few-shot 3D Segmentation netwrok, TFS3D, and a further training-based variant, TFS3D-T. Without any learnable parameters, TFS3D extracts dense representations by trigonometric positional encodings, and achieves comparable performance to previous training-based methods. Due to the elimination of pre-training, TFS3D can alleviate the domain gap issue and save a substantial amount of time. Building upon TFS3D, TFS3D-T only requires to train a lightweight query-support transferring attention (QUEST), which enhances the interaction between the few-shot query and support data. Experiments demonstrate TFS3D-T improves previous state-of-the-art methods by +6.93% and +17.96% mIoU respectively on S3DIS and ScanNet, while reducing the training time by -90%, indicating superior effectiveness and efficiency.
Efficient Multi-View Inverse Rendering Using a Hybrid Differentiable Rendering Method
Aug 19, 2023Recovering the shape and appearance of real-world objects from natural 2D images is a long-standing and challenging inverse rendering problem. In this paper, we introduce a novel hybrid differentiable rendering method to efficiently reconstruct the 3D geometry and reflectance of a scene from multi-view images captured by conventional hand-held cameras. Our method follows an analysis-by-synthesis approach and consists of two phases. In the initialization phase, we use traditional SfM and MVS methods to reconstruct a virtual scene roughly matching the real scene. Then in the optimization phase, we adopt a hybrid approach to refine the geometry and reflectance, where the geometry is first optimized using an approximate differentiable rendering method, and the reflectance is optimized afterward using a physically-based differentiable rendering method. Our hybrid approach combines the efficiency of approximate methods with the high-quality results of physically-based methods. Extensive experiments on synthetic and real data demonstrate that our method can produce reconstructions with similar or higher quality than state-of-the-art methods while being more efficient.
Not All Features Matter: Enhancing Few-shot CLIP with Adaptive Prior Refinement
Apr 03, 2023



The popularity of Contrastive Language-Image Pre-training (CLIP) has propelled its application to diverse downstream vision tasks. To improve its capacity on downstream tasks, few-shot learning has become a widely-adopted technique. However, existing methods either exhibit limited performance or suffer from excessive learnable parameters. In this paper, we propose APE, an Adaptive Prior rEfinement method for CLIP's pre-trained knowledge, which achieves superior accuracy with high computational efficiency. Via a prior refinement module, we analyze the inter-class disparity in the downstream data and decouple the domain-specific knowledge from the CLIP-extracted cache model. On top of that, we introduce two model variants, a training-free APE and a training-required APE-T. We explore the trilateral affinities between the test image, prior cache model, and textual representations, and only enable a lightweight category-residual module to be trained. For the average accuracy over 11 benchmarks, both APE and APE-T attain state-of-the-art and respectively outperform the second-best by +1.59% and +1.99% under 16 shots with x30 less learnable parameters.
PointCLIP V2: Adapting CLIP for Powerful 3D Open-world Learning
Nov 21, 2022



Contrastive Language-Image Pre-training (CLIP) has shown promising open-world performance on 2D image tasks, while its transferred capacity on 3D point clouds, i.e., PointCLIP, is still far from satisfactory. In this work, we propose PointCLIP V2, a powerful 3D open-world learner, to fully unleash the potential of CLIP on 3D point cloud data. First, we introduce a realistic shape projection module to generate more realistic depth maps for CLIP's visual encoder, which is quite efficient and narrows the domain gap between projected point clouds with natural images. Second, we leverage large-scale language models to automatically design a more descriptive 3D-semantic prompt for CLIP's textual encoder, instead of the previous hand-crafted one. Without introducing any training in 3D domains, our approach significantly surpasses PointCLIP by +42.90%, +40.44%, and +28.75% accuracy on three datasets for zero-shot 3D classification. Furthermore, PointCLIP V2 can be extended to few-shot classification, zero-shot part segmentation, and zero-shot 3D object detection in a simple manner, demonstrating our superior generalization ability for 3D open-world learning. Code will be available at https://github.com/yangyangyang127/PointCLIP_V2.
SRIBO: An Efficient and Resilient Single-Range and Inertia Based Odometry for Flying Robots
Nov 06, 2022Positioning with one inertial measurement unit and one ranging sensor is commonly thought to be feasible only when trajectories are in certain patterns ensuring observability. For this reason, to pursue observable patterns, it is required either exciting the trajectory or searching key nodes in a long interval, which is commonly highly nonlinear and may also lack resilience. Therefore, such a positioning approach is still not widely accepted in real-world applications. To address this issue, this work first investigates the dissipative nature of flying robots considering aerial drag effects and re-formulates the corresponding positioning problem, which guarantees observability almost surely. On this basis, a dimension-reduced wriggling estimator is proposed accordingly. This estimator slides the estimation horizon in a stepping manner, and output matrices can be approximately evaluated based on the historical estimation sequence. The computational complexity is then further reduced via a dimension-reduction approach using polynomial fittings. In this way, the states of robots can be estimated via linear programming in a sufficiently long interval, and the degree of observability is thereby further enhanced because an adequate redundancy of measurements is available for each estimation. Subsequently, the estimator's convergence and numerical stability are proven theoretically. Finally, both indoor and outdoor experiments verify that the proposed estimator can achieve decimeter-level precision at hundreds of hertz per second, and it is resilient to sensors' failures. Hopefully, this study can provide a new practical approach for self-localization as well as relative positioning of cooperative agents with low-cost and lightweight sensors.
Human Biophysics as Network Weights: Conditional Generative Models for Ultra-fast Simulation
Nov 03, 2022



Simulations of biophysical systems have provided a huge contribution to our fundamental understanding of human physiology and remain a central pillar for developments in medical devices and human machine interfaces. However, despite their successes, such simulations usually rely on highly computationally expensive numerical modelling, which is often inefficient to adapt to new simulation parameters. This limits their use in dynamic models of human behavior, for example in modelling the electric fields generated by muscles in a moving arm. We propose the alternative approach to use conditional generative models, which can learn complex relationships between the underlying generative conditions whilst remaining inexpensive to sample from. As a demonstration of this concept, we present BioMime, a hybrid architecture that combines elements of deep latent variable models and conditional adversarial training to construct a generative model that can both transform existing data samples to reflect new modelling assumptions and sample new data from a conditioned distribution. We demonstrate that BioMime can learn to accurately mimic a complex numerical model of human muscle biophysics and then use this knowledge to continuously sample from a dynamically changing system in real-time. We argue that transfer learning approaches with conditional generative models are a viable solution for dynamic simulation with any numerical model.
Hierarchical Motion Planning Framework for Cooperative Transportation of Multiple Mobile Manipulators
Aug 17, 2022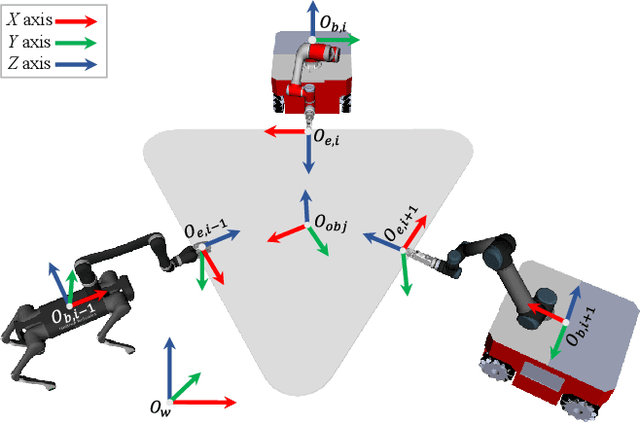
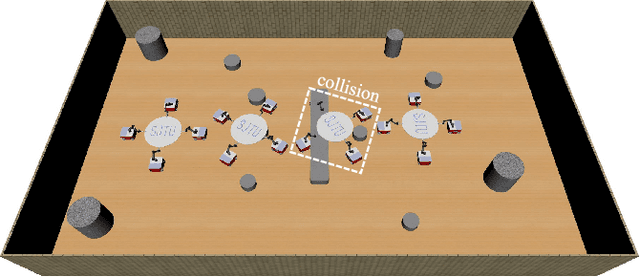
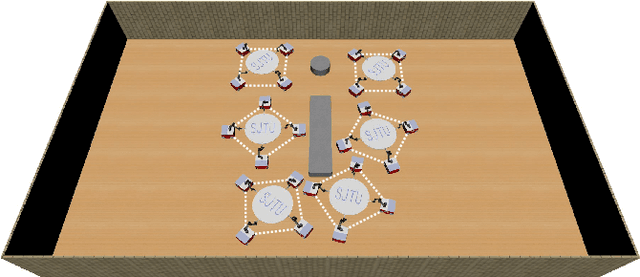
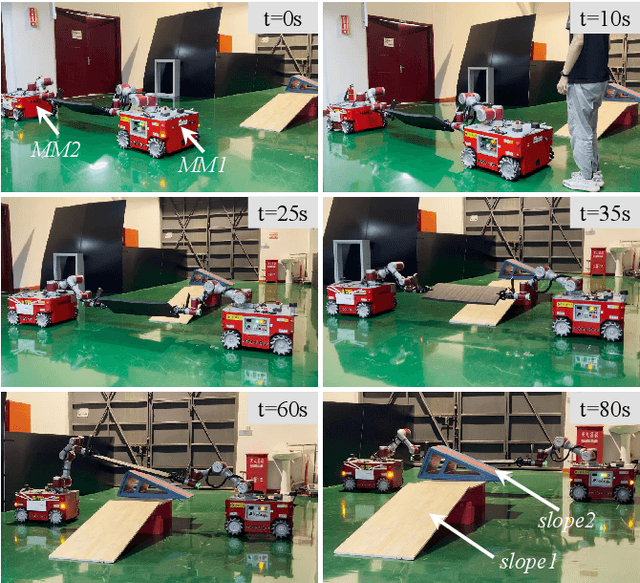
Multiple mobile manipulators show superiority in the tasks requiring mobility and dexterity compared with a single robot, especially when manipulating/transporting bulky objects. When the object and the manipulators are rigidly connected, closed-chain will form and the motion of the whole system will be restricted onto a lower-dimensional manifold. However, current research on multi-robot motion planning did not fully consider the formation of the whole system, the redundancy of the mobile manipulator and obstacles in the environment, which make the tasks challenging. Therefore, this paper proposes a hierarchical framework to efficiently solve the above challenges, where the centralized layer plans the object's motion offline and the decentralized layer independently explores the redundancy of each robot in real-time. In addition, closed-chain, obstacle-avoidance and the lower bound of the formation constraints are guaranteed in the centralized layer, which cannot be achieved simultaneously by other planners. Moreover, capability map, which represents the distribution of the formation constraint, is applied to speed up the two layers. Both simulation and experimental results show that the proposed framework outperforms the benchmark planners significantly. The system could bypass or cross obstacles in cluttered environments, and the framework can be applied to different numbers of heterogeneous mobile manipulators.