 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Motion Control of Multiple Mobile Manipulator System with Disturbance and Communication Delay
Jun 09, 2024



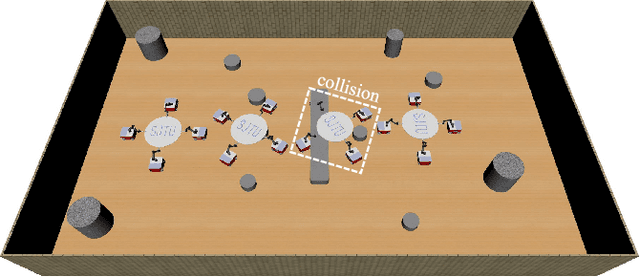
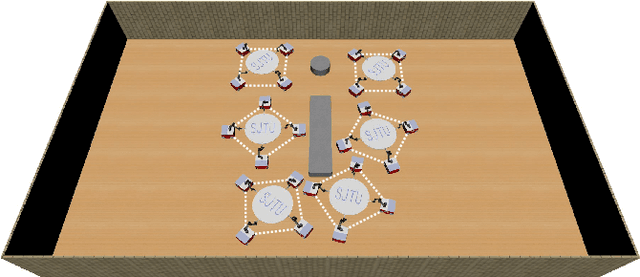
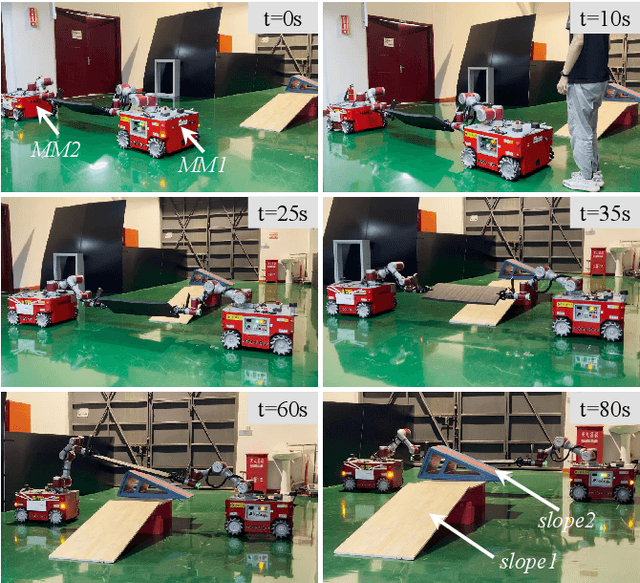
In real-world object manipulation scenarios, multiple mobile manipulator systems may suffer from disturbances and asynchrony, leading to excessive interaction forces and causing object damage or emergency stops. This paper presents a novel distributed motion control approach aimed at reducing these unnecessary interaction forces. The control strategy only utilizes force information without the need for global position and velocity information. Disturbances are corrected through compensatory movements of the manipulators. Besides, the asymmetric, non-uniform, and time-varying communication delays between robots are also considered. The stability of the control law is rigorously proven by the Lyapunov theorem. Subsequently, the efficacy of the proposed control law is validated through simulations and experiments of collaborative object transportation by two robots. Experimental results demonstrate the effectiveness of the proposed control law in reducing interaction forces during object manipulation.
RHAML: Rendezvous-based Hierarchical Architecture for Mutual Localization
May 20, 2024



Mutual localization serves as the foundation for collaborative perception and task assignment in multi-robot systems. Effectively utilizing limited onboard sensors for mutual localization between marker-less robots is a worthwhile goal. However, due to inadequate consideration of large scale variations of the observed robot and localization refinement, previous work has shown limited accuracy when robots are equipped only with RGB cameras. To enhance the precision of localization, this paper proposes a novel rendezvous-based hierarchical architecture for mutual localization (RHAML). Firstly, to learn multi-scale robot features, anisotropic convolutions are introduced into the network, yielding initial localization results. Then, the iterative refinement module with rendering is employed to adjust the observed robot poses. Finally, the pose graph is conducted to globally optimize all localization results, which takes into account multi-frame observations. Therefore, a flexible architecture is provided that allows for the selection of appropriate modules based on requirements. Simulations demonstrate that RHAML effectively addresses the problem of multi-robot mutual localization, achieving translation errors below 2 cm and rotation errors below 0.5 degrees when robots exhibit 5 m of depth variation. Moreover, its practical utility is validated by applying it to map fusion when multi-robots explore unknown environments.
Multi-Robot Rendezvous in Unknown Environment with Limited Communication
May 14, 2024



Rendezvous aims at gathering all robots at a specific location, which is an important collaborative behavior for multirobot systems. However, in an unknown environment, it is challenging to achieve rendezvous. Previous researches mainly focus on special scenarios where communication is not allowed and each robot executes a random searching strategy, which is highly time-consuming, especially in large-scale environments. In this work, we focus on rendezvous in unknown environments where communication is available. We divide this task into two steps: rendezvous based environment exploration with relative pose (RP) estimation and rendezvous point election. A new strategy called partitioned and incomplete exploration for rendezvous (PIER) is proposed to efficiently explore the unknown environment, where lightweight topological maps are constructed and shared among robots for RP estimation with very few communications. Then, a rendezvous point selection algorithm based on the merged topological map is proposed for efficient rendezvous for multi-robot systems. The effectiveness of the proposed methods is validated in both simulations and real-world experiments.
Motion Planning for Multiple Mobile Manipulator System in Complex Flipping Manipulation
Dec 11, 2023Multiple robot systems are favored for object manipulation and transportation, especially for large objects. However, in more complex manipulation such as flipping, these systems encounter a new challenge, configuration disconnectivity of manipulators. Grasping objects by manipulators will impose closed-chain constraints on the system, which in turn limits the feasible motions of manipulators and further compromises the configuration connectivity. Multiple mobile manipulator systems show much more flexibility in object manipulation with the mobility of the mobile platform and have the potential to address the above problem. In this paper, a novel planning framework is proposed for complex flipping manipulation by incorporating platform motions and regrasping. Firstly, two types of trajectories, mobile manipulator planning and regrasping planning, are classified and can be assigned different priorities for different tasks. Secondly, corresponding planning methods are designed for each type of trajectory. Specifically, in mobile manipulator planning, the configuration of the platform is determined through optimization to ensure connectivity when the manipulator approaches configuration boundaries. In regrasping planning, closed-chain constraints are temporarily disregarded and the manipulation capabilities are prioritized to facilitate subsequent planning. Finally, the structure of the overall planning framework is provided. Experimental results demonstrate that the proposed planner efficiently plans the motions of the system to accomplish flipping manipulation. Additionally, a comprehensive experiment emphasizes the significance of our planner in extending the capabilities of multiple mobile manipulator systems in complex tasks.
FHT-Map: Feature-based Hierarchical Topological Map for Relocalization and Path Planning
Oct 21, 2023



Topological maps are favorable for their small storage compared to geometric map. However, they are limited in relocalization and path planning capabilities. To solve this problem, a feature-based hierarchical topological map (FHT-Map) is proposed along with a real-time map construction algorithm for robot exploration. Specifically, the FHT-Map utilizes both RGB cameras and LiDAR information and consists of two types of nodes: main node and support node. Main nodes will store visual information compressed by convolutional neural network and local laser scan data to enhance subsequent relocalization capability. Support nodes retain a minimal amount of data to ensure storage efficiency while facilitating path planning. After map construction with robot exploration, the FHT-Map can be used by other robots for relocalization and path planning. Experiments are conducted in Gazebo simulator, and the results demonstrate that the proposed FHT-Map can effectively improve relocalization and path planning capability compared with other topological maps. Moreover, experiments on hierarchical architecture are implemented to show the necessity of two types of nodes.
Forward Kinematics of Object Transport by a Multi-Robot System with Deformable Sheet
Oct 18, 2023



We present object handling and transport by a multi-robot team with a deformable sheet as a carrier. Due to the deformability of the sheet and the high dimension of the whole system, it is challenging to clearly describe all the possible positions of the object on the sheet for a given formation of the multi-robot system. A complete forward kinematics (FK) method is proposed in this paper for object handling by an $N$-mobile robot team with a deformable sheet. Based on the virtual variable cables model, a constrained quadratic problem (CQP) is formulated by combining the form closure and minimum potential energy conditions of the system. Analytical solutions to the CQP are presented and then further verified with the force closure condition. With the proposed FK method, all possible solutions are obtained with the given initial sheet shape and the robot team formation. We demonstrate the effectiveness, completeness, and efficiency of the FK method with simulation and experimental results.
A Novel Graph-based Motion Planner of Multi-Mobile Robot Systems with Formation and Obstacle Constraints
Oct 07, 2022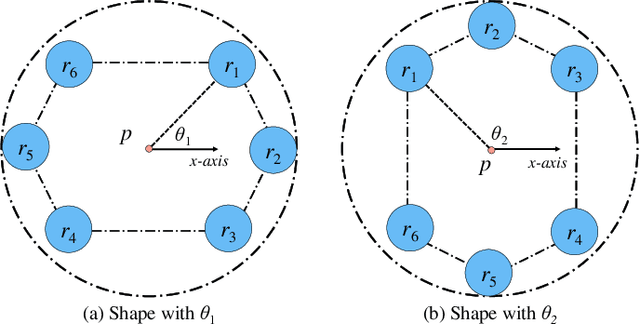
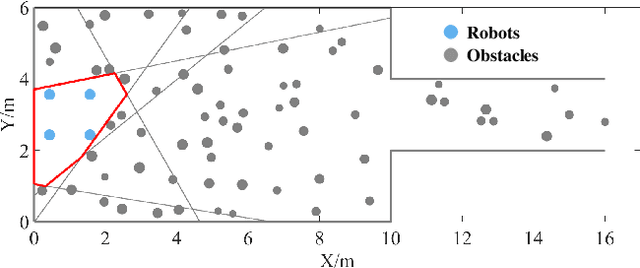
Multi-mobile robot systems show great advantages over one single robot in many applications. However, the robots are required to form desired task-specified formations, making feasible motions decrease significantly. Thus, it is challenging to determine whether the robots can pass through an obstructed environment under formation constraints, especially in an obstacle-rich environment. Furthermore, is there an optimal path for the robots? To deal with the two problems, a novel graphbased motion planner is proposed in this paper. A mapping between workspace and configuration space of multi-mobile robot systems is first built, where valid configurations can be acquired to satisfy both formation constraints and collision avoidance. Then, an undirected graph is generated by verifying connectivity between valid configurations. The breadth-first search method is employed to answer the question of whether there is a feasible path on the graph. Finally, an optimal path will be planned on the updated graph, considering the cost of path length and formation preference. Simulation results show that the planner can be applied to get optimal motions of robots under formation constraints in obstacle-rich environments. Additionally, different constraints are considered.
Hierarchical Motion Planning Framework for Cooperative Transportation of Multiple Mobile Manipulators
Aug 17, 2022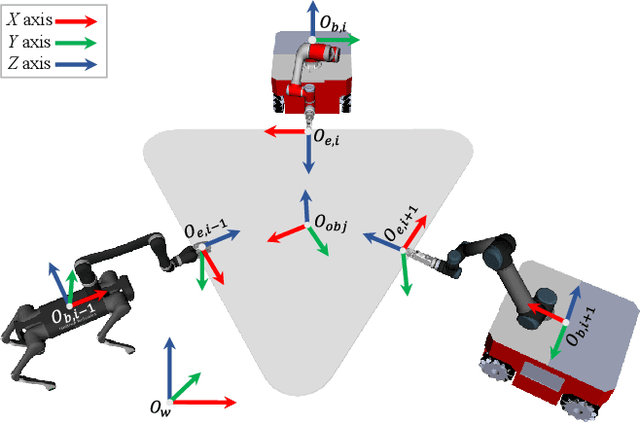
Multiple mobile manipulators show superiority in the tasks requiring mobility and dexterity compared with a single robot, especially when manipulating/transporting bulky objects. When the object and the manipulators are rigidly connected, closed-chain will form and the motion of the whole system will be restricted onto a lower-dimensional manifold. However, current research on multi-robot motion planning did not fully consider the formation of the whole system, the redundancy of the mobile manipulator and obstacles in the environment, which make the tasks challenging. Therefore, this paper proposes a hierarchical framework to efficiently solve the above challenges, where the centralized layer plans the object's motion offline and the decentralized layer independently explores the redundancy of each robot in real-time. In addition, closed-chain, obstacle-avoidance and the lower bound of the formation constraints are guaranteed in the centralized layer, which cannot be achieved simultaneously by other planners. Moreover, capability map, which represents the distribution of the formation constraint, is applied to speed up the two layers. Both simulation and experimental results show that the proposed framework outperforms the benchmark planners significantly. The system could bypass or cross obstacles in cluttered environments, and the framework can be applied to different numbers of heterogeneous mobile manipulators.
Obstacle Crossing by Multi-mobile Robots in Object Transportation with Deformable Sheet
Nov 17, 2021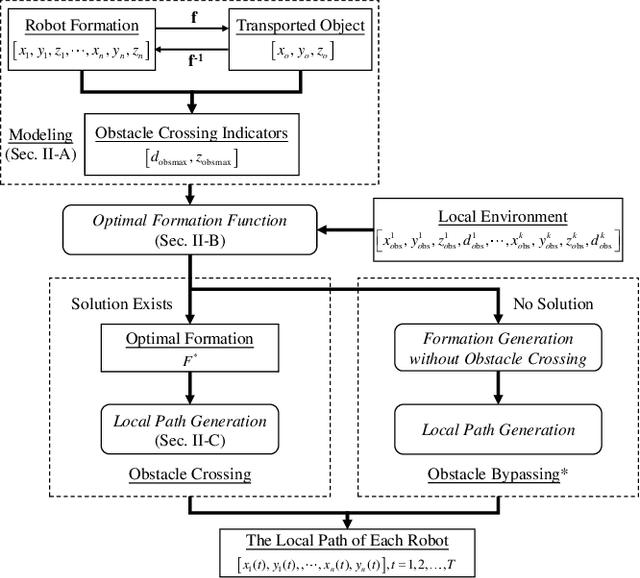
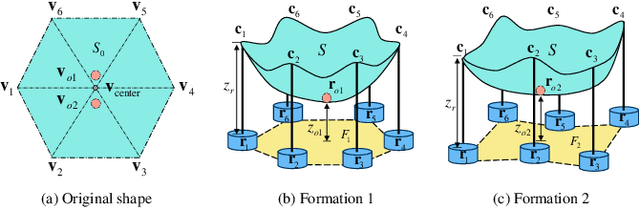
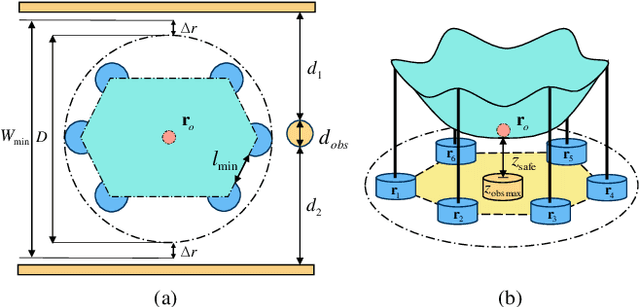
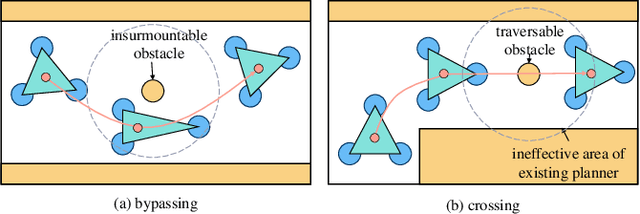
Multi-robot transportation (MRT) is to transport the object to the destination by the cooperation of multiple robots. In the process of object transportation, obstacle avoidance is an indispensable feature. In traditional local planners, obstacles are usually considered insurmountable, so the robot team bypasses the obstacles as a whole. However, many obstacles can be crossed in real situation. Studying the obstacle crossing ability of robot team can improve the efficiency of MRT and increase the planning success rate in complex environment. Inspired by the patient transfer through bed sheet, this paper focuses on the object transportation by multi-mobile robots with deformable sheet. A new local planner with obstacle crossing capability is proposed, which consists of three parts: deformable sheet modeling, formation optimization and local path generation. It can successfully find an obstacle crossing path in complex scenarios where other planners fail. The effectiveness and the versatility of the planner is verified by a case study with three mobile robots in the experiment and a simulation with four robots.