 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Perceptive Platform Adaptive Locomotion Controllers for Quadrupedal Robots
Jun 23, 2026Universal quadrupedal locomotion remains limited by the difficulty of integrating perception across diverse robot morphologies. State-of-the-art controllers rely on single-robot training or blind policies that omit real-time perception, leading to poor cross-embodiment generalization. Designing locomotion policies that remain robust across related quadruped morphologies while incorporating perception is challenging. Moreover, fully perceptive policies are often sensitive to noise, whereas blind controllers lack terrain awareness. In this work, we study how perception should be integrated into morphology-aware reinforcement learning architectures for deployable quadrupedal control. Building on MorAL, we train morphology-specialized universal controllers on multiple reference quadrupeds using adaptive terrain curricula. We compare a blind baseline, a critic-perceptive variant (MorAL+), and a fully perceptive actor-critic (PPAL). Policies are evaluated in simulation on flat and rough terrains, and deployed on ANYmal hardware. Results show that critic-only perception improves robustness and tracking consistency over blind baselines while remaining more stable than fully perceptive policies under perception noise. These findings highlight that perception placement and curriculum design are key factors for scalable, morphology-aware locomotion.
Sampling Strategies for Robust Universal Quadrupedal Locomotion Policies
Oct 08, 2025This work focuses on sampling strategies of configuration variations for generating robust universal locomotion policies for quadrupedal robots. We investigate the effects of sampling physical robot parameters and joint proportional-derivative gains to enable training a single reinforcement learning policy that generalizes to multiple parameter configurations. Three fundamental joint gain sampling strategies are compared: parameter sampling with (1) linear and polynomial function mappings of mass-to-gains, (2) performance-based adaptive filtering, and (3) uniform random sampling. We improve the robustness of the policy by biasing the configurations using nominal priors and reference models. All training was conducted on RaiSim, tested in simulation on a range of diverse quadrupeds, and zero-shot deployed onto hardware using the ANYmal quadruped robot. Compared to multiple baseline implementations, our results demonstrate the need for significant joint controller gains randomization for robust closing of the sim-to-real gap.
Reference Free Platform Adaptive Locomotion for Quadrupedal Robots using a Dynamics Conditioned Policy
May 21, 2025This article presents Platform Adaptive Locomotion (PAL), a unified control method for quadrupedal robots with different morphologies and dynamics. We leverage deep reinforcement learning to train a single locomotion policy on procedurally generated robots. The policy maps proprioceptive robot state information and base velocity commands into desired joint actuation targets, which are conditioned using a latent embedding of the temporally local system dynamics. We explore two conditioning strategies - one using a GRU-based dynamics encoder and another using a morphology-based property estimator - and show that morphology-aware conditioning outperforms temporal dynamics encoding regarding velocity task tracking for our hardware test on ANYmal C. Our results demonstrate that both approaches achieve robust zero-shot transfer across multiple unseen simulated quadrupeds. Furthermore, we demonstrate the need for careful robot reference modelling during training, enabling us to reduce the velocity tracking error by up to 30% compared to the baseline method. Despite PAL not surpassing the best-performing reference-free controller in all cases, our analysis uncovers critical design choices and informs improvements to the state of the art.
Bounded haptic teleoperation of a quadruped robot's foot posture for sensing and manipulation
Dec 16, 2019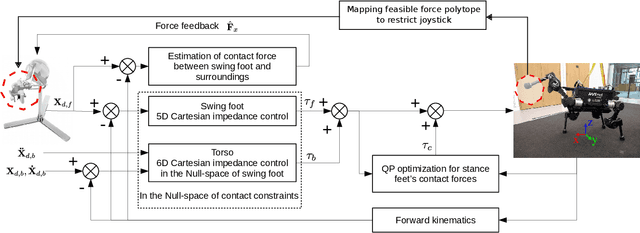
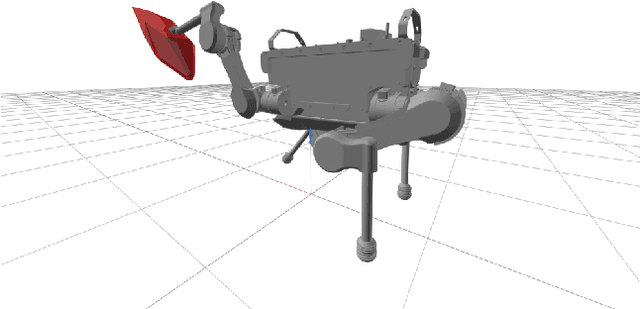
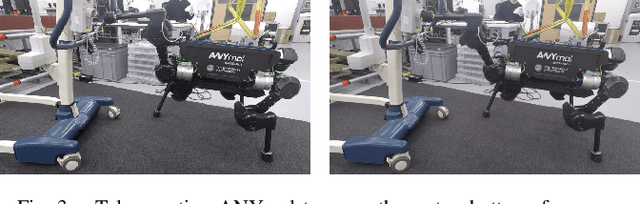
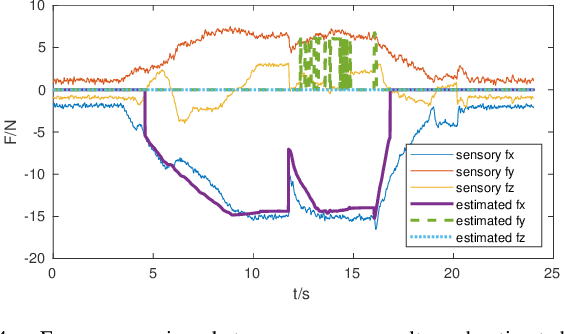
This paper presents a control framework to teleoperate a quadruped robot's foot for operator-guided haptic exploration of the environment. Since one leg of a quadruped robot typically only has 3 actuated degrees of freedom (DoFs), the torso is employed to assist foot posture control via a hierarchical whole-body controller. The foot and torso postures are controlled by two analytical Cartesian impedance controllers cascaded by a null space projector. The contact forces acting on supporting feet are optimized by quadratic programming (QP). The foot's Cartesian impedance controller may also estimate contact forces from trajectory tracking errors, and relay the force-feedback to the operator. A 7D haptic joystick, Sigma.7, transmits motion commands to the quadruped robot ANYmal, and renders the force feedback. Furthermore, the joystick's motion is bounded by mapping the foot's feasible force polytope constrained by the friction cones and torque limits in order to prevent the operator from driving the robot to slipping or falling over. Experimental results demonstrate the efficiency of the proposed framework.