 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOff-policy Distributional Q($λ$): Distributional RL without Importance Sampling
Feb 08, 2024We introduce off-policy distributional Q($\lambda$), a new addition to the family of off-policy distributional evaluation algorithms. Off-policy distributional Q($\lambda$) does not apply importance sampling for off-policy learning, which introduces intriguing interactions with signed measures. Such unique properties distributional Q($\lambda$) from other existing alternatives such as distributional Retrace. We characterize the algorithmic properties of distributional Q($\lambda$) and validate theoretical insights with tabular experiments. We show how distributional Q($\lambda$)-C51, a combination of Q($\lambda$) with the C51 agent, exhibits promising results on deep RL benchmarks.
Bootstrapped Representations in Reinforcement Learning
Jun 16, 2023In reinforcement learning (RL), state representations are key to dealing with large or continuous state spaces. While one of the promises of deep learning algorithms is to automatically construct features well-tuned for the task they try to solve, such a representation might not emerge from end-to-end training of deep RL agents. To mitigate this issue, auxiliary objectives are often incorporated into the learning process and help shape the learnt state representation. Bootstrapping methods are today's method of choice to make these additional predictions. Yet, it is unclear which features these algorithms capture and how they relate to those from other auxiliary-task-based approaches. In this paper, we address this gap and provide a theoretical characterization of the state representation learnt by temporal difference learning (Sutton, 1988). Surprisingly, we find that this representation differs from the features learned by Monte Carlo and residual gradient algorithms for most transition structures of the environment in the policy evaluation setting. We describe the efficacy of these representations for policy evaluation, and use our theoretical analysis to design new auxiliary learning rules. We complement our theoretical results with an empirical comparison of these learning rules for different cumulant functions on classic domains such as the four-room domain (Sutton et al, 1999) and Mountain Car (Moore, 1990).
The Statistical Benefits of Quantile Temporal-Difference Learning for Value Estimation
May 28, 2023



We study the problem of temporal-difference-based policy evaluation in reinforcement learning. In particular, we analyse the use of a distributional reinforcement learning algorithm, quantile temporal-difference learning (QTD), for this task. We reach the surprising conclusion that even if a practitioner has no interest in the return distribution beyond the mean, QTD (which learns predictions about the full distribution of returns) may offer performance superior to approaches such as classical TD learning, which predict only the mean return, even in the tabular setting.
Deep Reinforcement Learning with Plasticity Injection
May 24, 2023A growing body of evidence suggests that neural networks employed in deep reinforcement learning (RL) gradually lose their plasticity, the ability to learn from new data; however, the analysis and mitigation of this phenomenon is hampered by the complex relationship between plasticity, exploration, and performance in RL. This paper introduces plasticity injection, a minimalistic intervention that increases the network plasticity without changing the number of trainable parameters or biasing the predictions. The applications of this intervention are two-fold: first, as a diagnostic tool $\unicode{x2014}$ if injection increases the performance, we may conclude that an agent's network was losing its plasticity. This tool allows us to identify a subset of Atari environments where the lack of plasticity causes performance plateaus, motivating future studies on understanding and combating plasticity loss. Second, plasticity injection can be used to improve the computational efficiency of RL training if the agent has to re-learn from scratch due to exhausted plasticity or by growing the agent's network dynamically without compromising performance. The results on Atari show that plasticity injection attains stronger performance compared to alternative methods while being computationally efficient.
Representations and Exploration for Deep Reinforcement Learning using Singular Value Decomposition
May 02, 2023



Representation learning and exploration are among the key challenges for any deep reinforcement learning agent. In this work, we provide a singular value decomposition based method that can be used to obtain representations that preserve the underlying transition structure in the domain. Perhaps interestingly, we show that these representations also capture the relative frequency of state visitations, thereby providing an estimate for pseudo-counts for free. To scale this decomposition method to large-scale domains, we provide an algorithm that never requires building the transition matrix, can make use of deep networks, and also permits mini-batch training. Further, we draw inspiration from predictive state representations and extend our decomposition method to partially observable environments. With experiments on multi-task settings with partially observable domains, we show that the proposed method can not only learn useful representation on DM-Lab-30 environments (that have inputs involving language instructions, pixel images, and rewards, among others) but it can also be effective at hard exploration tasks in DM-Hard-8 environments.
Understanding plasticity in neural networks
Mar 02, 2023Plasticity, the ability of a neural network to quickly change its predictions in response to new information, is essential for the adaptability and robustness of deep reinforcement learning systems. Deep neural networks are known to lose plasticity over the course of training even in relatively simple learning problems, but the mechanisms driving this phenomenon are still poorly understood. This paper conducts a systematic empirical analysis into plasticity loss, with the goal of understanding the phenomenon mechanistically in order to guide the future development of targeted solutions. We find that loss of plasticity is deeply connected to changes in the curvature of the loss landscape, but that it typically occurs in the absence of saturated units or divergent gradient norms. Based on this insight, we identify a number of parameterization and optimization design choices which enable networks to better preserve plasticity over the course of training. We validate the utility of these findings in larger-scale learning problems by applying the best-performing intervention, layer normalization, to a deep RL agent trained on the Arcade Learning Environment.
An Analysis of Quantile Temporal-Difference Learning
Jan 11, 2023



We analyse quantile temporal-difference learning (QTD), a distributional reinforcement learning algorithm that has proven to be a key component in several successful large-scale applications of reinforcement learning. Despite these empirical successes, a theoretical understanding of QTD has proven elusive until now. Unlike classical TD learning, which can be analysed with standard stochastic approximation tools, QTD updates do not approximate contraction mappings, are highly non-linear, and may have multiple fixed points. The core result of this paper is a proof of convergence to the fixed points of a related family of dynamic programming procedures with probability 1, putting QTD on firm theoretical footing. The proof establishes connections between QTD and non-linear differential inclusions through stochastic approximation theory and non-smooth analysis.
Settling the Reward Hypothesis
Dec 20, 2022

The reward hypothesis posits that, "all of what we mean by goals and purposes can be well thought of as maximization of the expected value of the cumulative sum of a received scalar signal (reward)." We aim to fully settle this hypothesis. This will not conclude with a simple affirmation or refutation, but rather specify completely the implicit requirements on goals and purposes under which the hypothesis holds.
Understanding Self-Predictive Learning for Reinforcement Learning
Dec 06, 2022



We study the learning dynamics of self-predictive learning for reinforcement learning, a family of algorithms that learn representations by minimizing the prediction error of their own future latent representations. Despite its recent empirical success, such algorithms have an apparent defect: trivial representations (such as constants) minimize the prediction error, yet it is obviously undesirable to converge to such solutions. Our central insight is that careful designs of the optimization dynamics are critical to learning meaningful representations. We identify that a faster paced optimization of the predictor and semi-gradient updates on the representation, are crucial to preventing the representation collapse. Then in an idealized setup, we show self-predictive learning dynamics carries out spectral decomposition on the state transition matrix, effectively capturing information of the transition dynamics. Building on the theoretical insights, we propose bidirectional self-predictive learning, a novel self-predictive algorithm that learns two representations simultaneously. We examine the robustness of our theoretical insights with a number of small-scale experiments and showcase the promise of the novel representation learning algorithm with large-scale experiments.
The Nature of Temporal Difference Errors in Multi-step Distributional Reinforcement Learning
Jul 15, 2022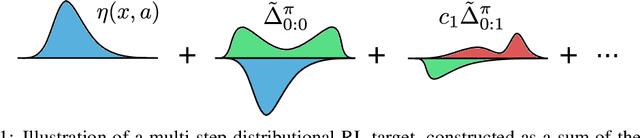
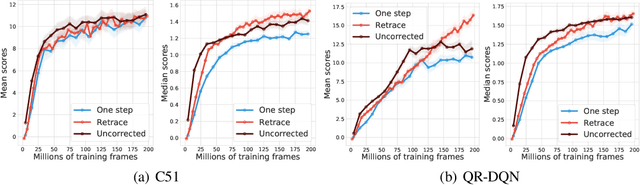
We study the multi-step off-policy learning approach to distributional RL. Despite the apparent similarity between value-based RL and distributional RL, our study reveals intriguing and fundamental differences between the two cases in the multi-step setting. We identify a novel notion of path-dependent distributional TD error, which is indispensable for principled multi-step distributional RL. The distinction from the value-based case bears important implications on concepts such as backward-view algorithms. Our work provides the first theoretical guarantees on multi-step off-policy distributional RL algorithms, including results that apply to the small number of existing approaches to multi-step distributional RL. In addition, we derive a novel algorithm, Quantile Regression-Retrace, which leads to a deep RL agent QR-DQN-Retrace that shows empirical improvements over QR-DQN on the Atari-57 benchmark. Collectively, we shed light on how unique challenges in multi-step distributional RL can be addressed both in theory and practice.