 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompositional Generalization from First Principles
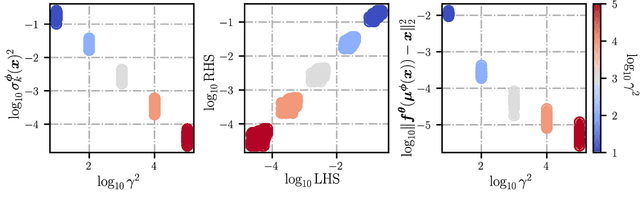
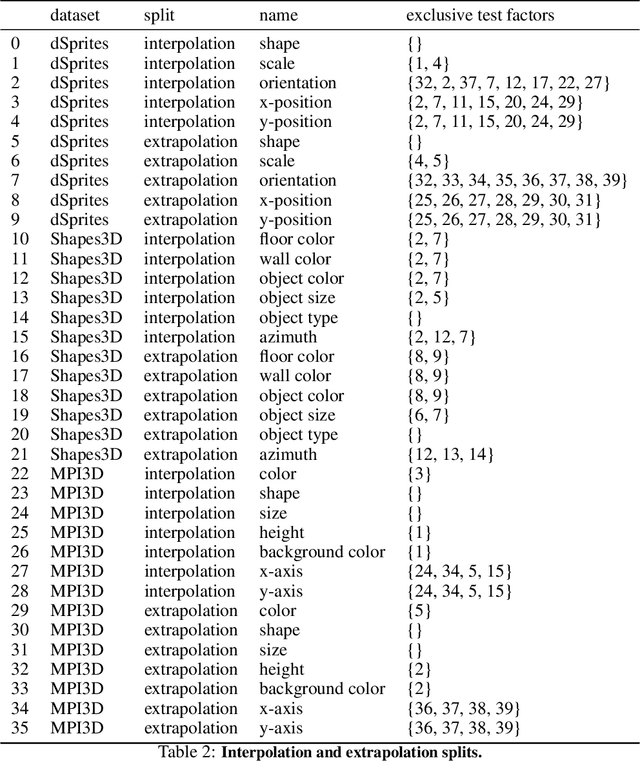
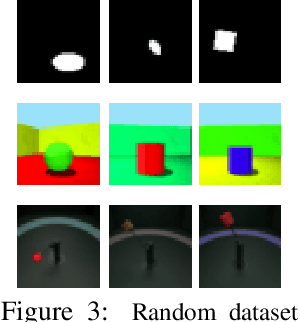
Jul 10, 2023Leveraging the compositional nature of our world to expedite learning and facilitate generalization is a hallmark of human perception. In machine learning, on the other hand, achieving compositional generalization has proven to be an elusive goal, even for models with explicit compositional priors. To get a better handle on compositional generalization, we here approach it from the bottom up: Inspired by identifiable representation learning, we investigate compositionality as a property of the data-generating process rather than the data itself. This reformulation enables us to derive mild conditions on only the support of the training distribution and the model architecture, which are sufficient for compositional generalization. We further demonstrate how our theoretical framework applies to real-world scenarios and validate our findings empirically. Our results set the stage for a principled theoretical study of compositional generalization.
Don't trust your eyes: on the reliability of feature visualizations
Jun 21, 2023



How do neural networks extract patterns from pixels? Feature visualizations attempt to answer this important question by visualizing highly activating patterns through optimization. Today, visualization methods form the foundation of our knowledge about the internal workings of neural networks, as a type of mechanistic interpretability. Here we ask: How reliable are feature visualizations? We start our investigation by developing network circuits that trick feature visualizations into showing arbitrary patterns that are completely disconnected from normal network behavior on natural input. We then provide evidence for a similar phenomenon occurring in standard, unmanipulated networks: feature visualizations are processed very differently from standard input, casting doubt on their ability to "explain" how neural networks process natural images. We underpin this empirical finding by theory proving that the set of functions that can be reliably understood by feature visualization is extremely small and does not include general black-box neural networks. Therefore, a promising way forward could be the development of networks that enforce certain structures in order to ensure more reliable feature visualizations.
Provably Learning Object-Centric Representations
May 23, 2023



Learning structured representations of the visual world in terms of objects promises to significantly improve the generalization abilities of current machine learning models. While recent efforts to this end have shown promising empirical progress, a theoretical account of when unsupervised object-centric representation learning is possible is still lacking. Consequently, understanding the reasons for the success of existing object-centric methods as well as designing new theoretically grounded methods remains challenging. In the present work, we analyze when object-centric representations can provably be learned without supervision. To this end, we first introduce two assumptions on the generative process for scenes comprised of several objects, which we call compositionality and irreducibility. Under this generative process, we prove that the ground-truth object representations can be identified by an invertible and compositional inference model, even in the presence of dependencies between objects. We empirically validate our results through experiments on synthetic data. Finally, we provide evidence that our theory holds predictive power for existing object-centric models by showing a close correspondence between models' compositionality and invertibility and their empirical identifiability.
Increasing Confidence in Adversarial Robustness Evaluations
Jun 28, 2022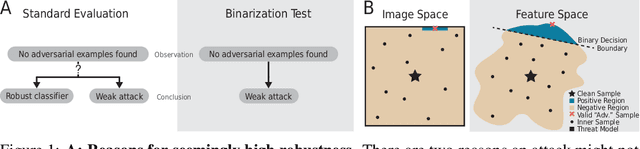
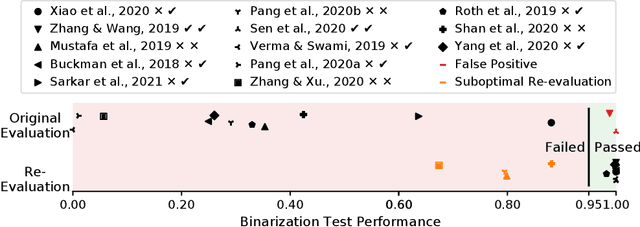
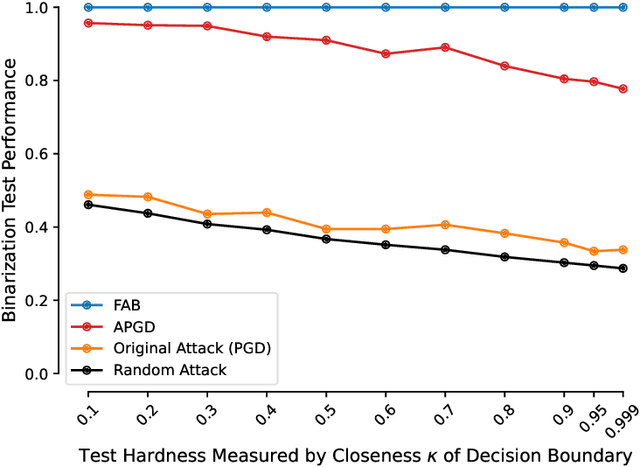
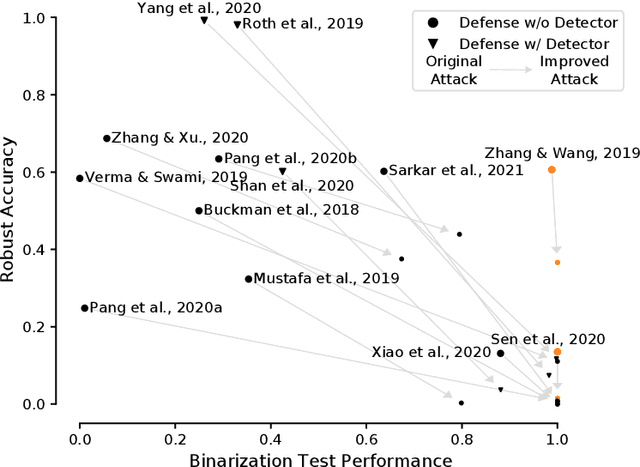
Hundreds of defenses have been proposed to make deep neural networks robust against minimal (adversarial) input perturbations. However, only a handful of these defenses held up their claims because correctly evaluating robustness is extremely challenging: Weak attacks often fail to find adversarial examples even if they unknowingly exist, thereby making a vulnerable network look robust. In this paper, we propose a test to identify weak attacks, and thus weak defense evaluations. Our test slightly modifies a neural network to guarantee the existence of an adversarial example for every sample. Consequentially, any correct attack must succeed in breaking this modified network. For eleven out of thirteen previously-published defenses, the original evaluation of the defense fails our test, while stronger attacks that break these defenses pass it. We hope that attack unit tests - such as ours - will be a major component in future robustness evaluations and increase confidence in an empirical field that is currently riddled with skepticism.
Embrace the Gap: VAEs Perform Independent Mechanism Analysis
Jun 06, 2022


Variational autoencoders (VAEs) are a popular framework for modeling complex data distributions; they can be efficiently trained via variational inference by maximizing the evidence lower bound (ELBO), at the expense of a gap to the exact (log-)marginal likelihood. While VAEs are commonly used for representation learning, it is unclear why ELBO maximization would yield useful representations, since unregularized maximum likelihood estimation cannot invert the data-generating process. Yet, VAEs often succeed at this task. We seek to elucidate this apparent paradox by studying nonlinear VAEs in the limit of near-deterministic decoders. We first prove that, in this regime, the optimal encoder approximately inverts the decoder -- a commonly used but unproven conjecture -- which we refer to as {\em self-consistency}. Leveraging self-consistency, we show that the ELBO converges to a regularized log-likelihood. This allows VAEs to perform what has recently been termed independent mechanism analysis (IMA): it adds an inductive bias towards decoders with column-orthogonal Jacobians, which helps recovering the true latent factors. The gap between ELBO and log-likelihood is therefore welcome, since it bears unanticipated benefits for nonlinear representation learning. In experiments on synthetic and image data, we show that VAEs uncover the true latent factors when the data generating process satisfies the IMA assumption.
Visual Representation Learning Does Not Generalize Strongly Within the Same Domain
Jul 23, 2021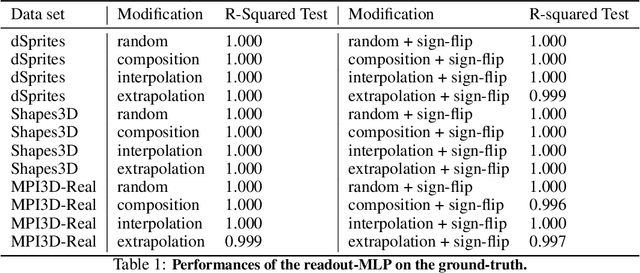

An important component for generalization in machine learning is to uncover underlying latent factors of variation as well as the mechanism through which each factor acts in the world. In this paper, we test whether 17 unsupervised, weakly supervised, and fully supervised representation learning approaches correctly infer the generative factors of variation in simple datasets (dSprites, Shapes3D, MPI3D). In contrast to prior robustness work that introduces novel factors of variation during test time, such as blur or other (un)structured noise, we here recompose, interpolate, or extrapolate only existing factors of variation from the training data set (e.g., small and medium-sized objects during training and large objects during testing). Models that learn the correct mechanism should be able to generalize to this benchmark. In total, we train and test 2000+ models and observe that all of them struggle to learn the underlying mechanism regardless of supervision signal and architectural bias. Moreover, the generalization capabilities of all tested models drop significantly as we move from artificial datasets towards more realistic real-world datasets. Despite their inability to identify the correct mechanism, the models are quite modular as their ability to infer other in-distribution factors remains fairly stable, providing only a single factor is out-of-distribution. These results point to an important yet understudied problem of learning mechanistic models of observations that can facilitate generalization.
How Well do Feature Visualizations Support Causal Understanding of CNN Activations?
Jun 23, 2021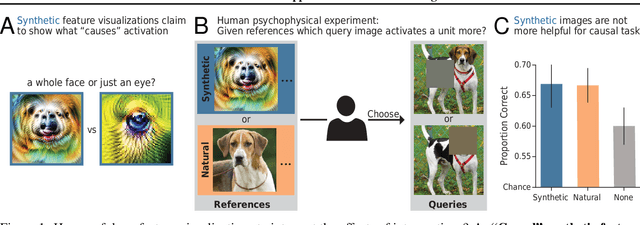
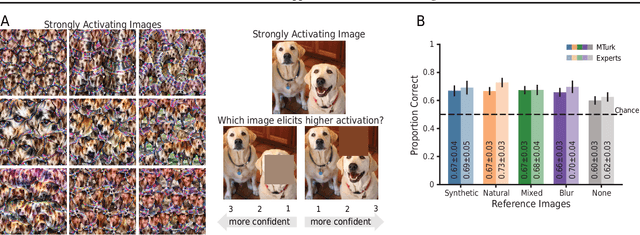
One widely used approach towards understanding the inner workings of deep convolutional neural networks is to visualize unit responses via activation maximization. Feature visualizations via activation maximization are thought to provide humans with precise information about the image features that cause a unit to be activated. If this is indeed true, these synthetic images should enable humans to predict the effect of an intervention, such as whether occluding a certain patch of the image (say, a dog's head) changes a unit's activation. Here, we test this hypothesis by asking humans to predict which of two square occlusions causes a larger change to a unit's activation. Both a large-scale crowdsourced experiment and measurements with experts show that on average, the extremely activating feature visualizations by Olah et al. (2017) indeed help humans on this task ($67 \pm 4\%$ accuracy; baseline performance without any visualizations is $60 \pm 3\%$). However, they do not provide any significant advantage over other visualizations (such as e.g. dataset samples), which yield similar performance ($66 \pm 3\%$ to $67 \pm 3\%$ accuracy). Taken together, we propose an objective psychophysical task to quantify the benefit of unit-level interpretability methods for humans, and find no evidence that feature visualizations provide humans with better "causal understanding" than simple alternative visualizations.
Partial success in closing the gap between human and machine vision
Jun 14, 2021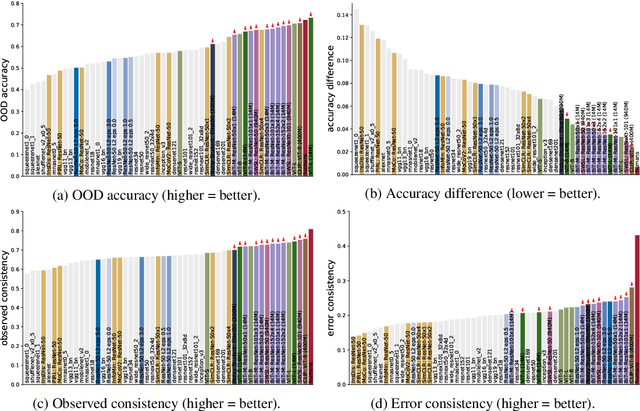

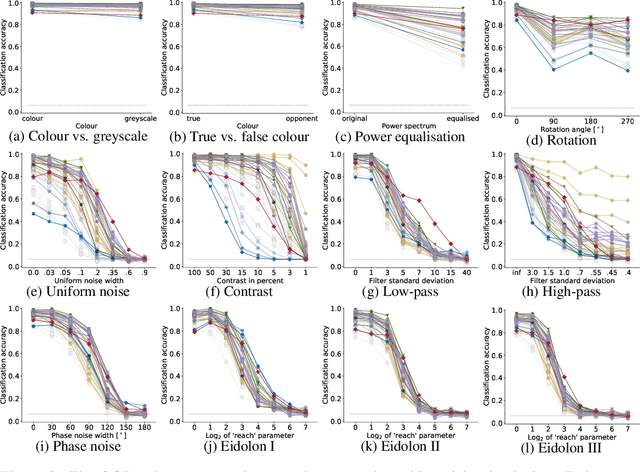
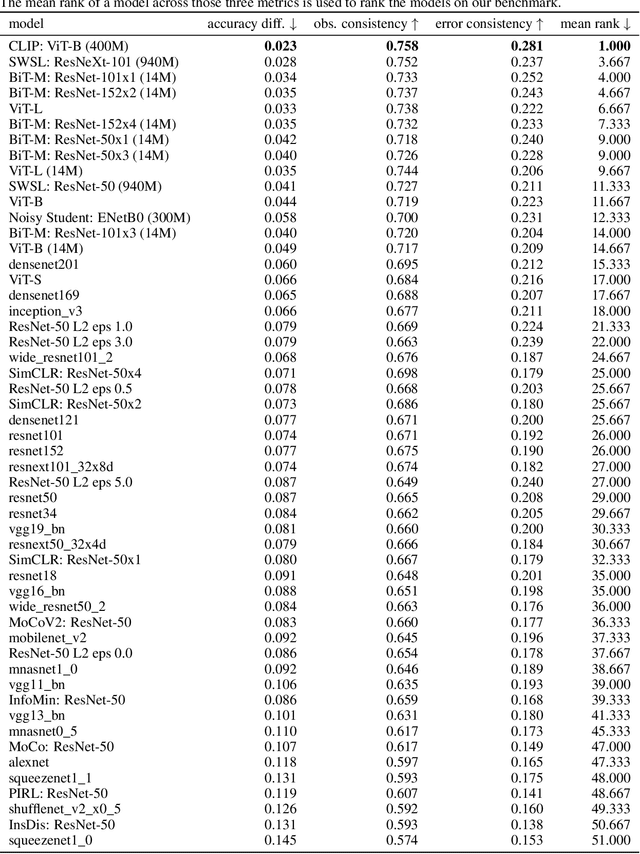
A few years ago, the first CNN surpassed human performance on ImageNet. However, it soon became clear that machines lack robustness on more challenging test cases, a major obstacle towards deploying machines "in the wild" and towards obtaining better computational models of human visual perception. Here we ask: Are we making progress in closing the gap between human and machine vision? To answer this question, we tested human observers on a broad range of out-of-distribution (OOD) datasets, adding the "missing human baseline" by recording 85,120 psychophysical trials across 90 participants. We then investigated a range of promising machine learning developments that crucially deviate from standard supervised CNNs along three axes: objective function (self-supervised, adversarially trained, CLIP language-image training), architecture (e.g. vision transformers), and dataset size (ranging from 1M to 1B). Our findings are threefold. (1.) The longstanding robustness gap between humans and CNNs is closing, with the best models now matching or exceeding human performance on most OOD datasets. (2.) There is still a substantial image-level consistency gap, meaning that humans make different errors than models. In contrast, most models systematically agree in their categorisation errors, even substantially different ones like contrastive self-supervised vs. standard supervised models. (3.) In many cases, human-to-model consistency improves when training dataset size is increased by one to three orders of magnitude. Our results give reason for cautious optimism: While there is still much room for improvement, the behavioural difference between human and machine vision is narrowing. In order to measure future progress, 17 OOD datasets with image-level human behavioural data are provided as a benchmark here: https://github.com/bethgelab/model-vs-human/
Self-Supervised Learning with Data Augmentations Provably Isolates Content from Style
Jun 08, 2021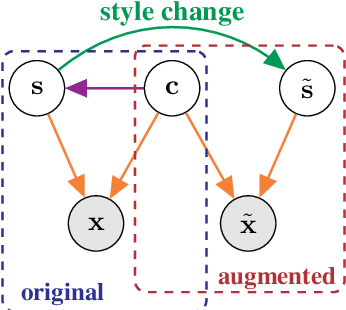
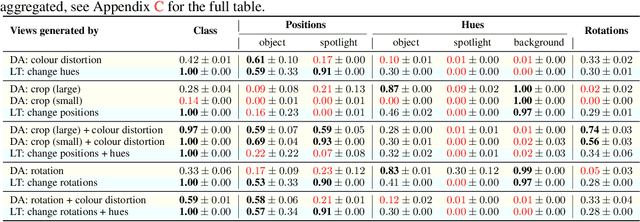
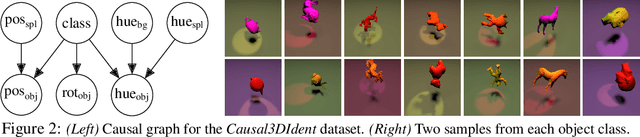
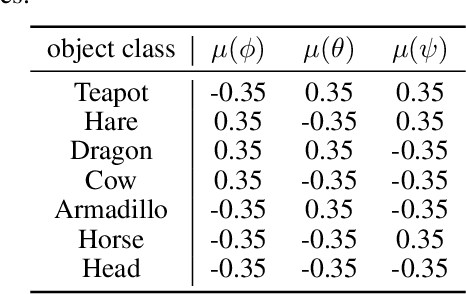
Self-supervised representation learning has shown remarkable success in a number of domains. A common practice is to perform data augmentation via hand-crafted transformations intended to leave the semantics of the data invariant. We seek to understand the empirical success of this approach from a theoretical perspective. We formulate the augmentation process as a latent variable model by postulating a partition of the latent representation into a content component, which is assumed invariant to augmentation, and a style component, which is allowed to change. Unlike prior work on disentanglement and independent component analysis, we allow for both nontrivial statistical and causal dependencies in the latent space. We study the identifiability of the latent representation based on pairs of views of the observations and prove sufficient conditions that allow us to identify the invariant content partition up to an invertible mapping in both generative and discriminative settings. We find numerical simulations with dependent latent variables are consistent with our theory. Lastly, we introduce Causal3DIdent, a dataset of high-dimensional, visually complex images with rich causal dependencies, which we use to study the effect of data augmentations performed in practice.
Adapting ImageNet-scale models to complex distribution shifts with self-learning
Apr 28, 2021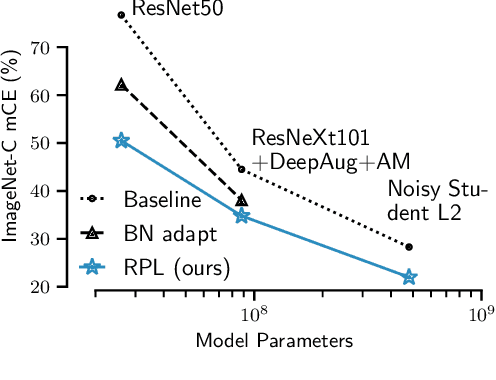
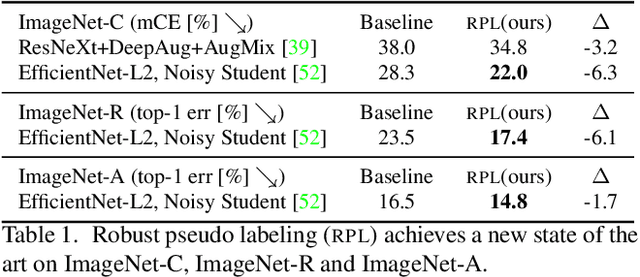
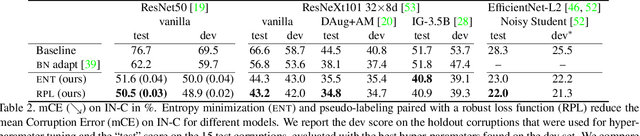
While self-learning methods are an important component in many recent domain adaptation techniques, they are not yet comprehensively evaluated on ImageNet-scale datasets common in robustness research. In extensive experiments on ResNet and EfficientNet models, we find that three components are crucial for increasing performance with self-learning: (i) using short update times between the teacher and the student network, (ii) fine-tuning only few affine parameters distributed across the network, and (iii) leveraging methods from robust classification to counteract the effect of label noise. We use these insights to obtain drastically improved state-of-the-art results on ImageNet-C (22.0% mCE), ImageNet-R (17.4% error) and ImageNet-A (14.8% error). Our techniques yield further improvements in combination with previously proposed robustification methods. Self-learning is able to reduce the top-1 error to a point where no substantial further progress can be expected. We therefore re-purpose the dataset from the Visual Domain Adaptation Challenge 2019 and use a subset of it as a new robustness benchmark (ImageNet-D) which proves to be a more challenging dataset for all current state-of-the-art models (58.2% error) to guide future research efforts at the intersection of robustness and domain adaptation on ImageNet scale.