 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAstra: Toward General-Purpose Mobile Robots via Hierarchical Multimodal Learning
Jun 06, 2025Modern robot navigation systems encounter difficulties in diverse and complex indoor environments. Traditional approaches rely on multiple modules with small models or rule-based systems and thus lack adaptability to new environments. To address this, we developed Astra, a comprehensive dual-model architecture, Astra-Global and Astra-Local, for mobile robot navigation. Astra-Global, a multimodal LLM, processes vision and language inputs to perform self and goal localization using a hybrid topological-semantic graph as the global map, and outperforms traditional visual place recognition methods. Astra-Local, a multitask network, handles local path planning and odometry estimation. Its 4D spatial-temporal encoder, trained through self-supervised learning, generates robust 4D features for downstream tasks. The planning head utilizes flow matching and a novel masked ESDF loss to minimize collision risks for generating local trajectories, and the odometry head integrates multi-sensor inputs via a transformer encoder to predict the relative pose of the robot. Deployed on real in-house mobile robots, Astra achieves high end-to-end mission success rate across diverse indoor environments.
Channel Pruning Guided by Spatial and Channel Attention for DNNs in Intelligent Edge Computing
Nov 08, 2020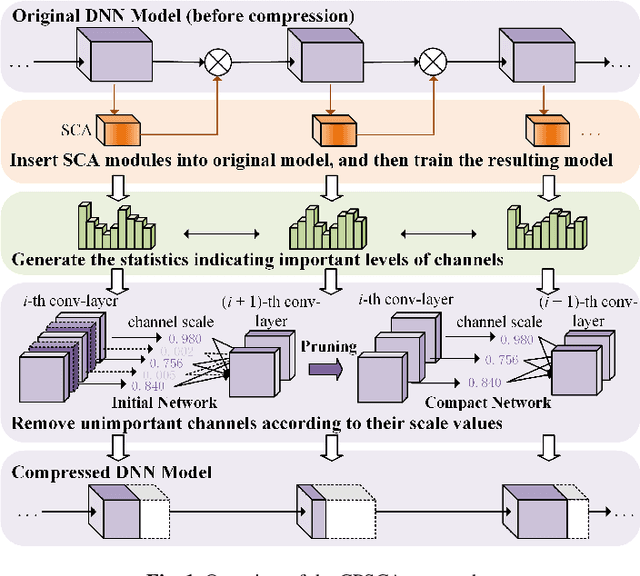
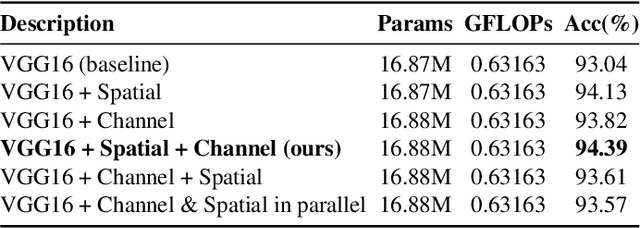
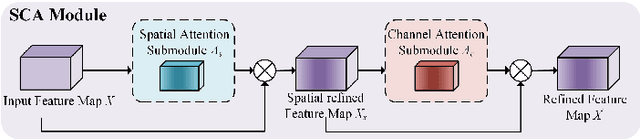
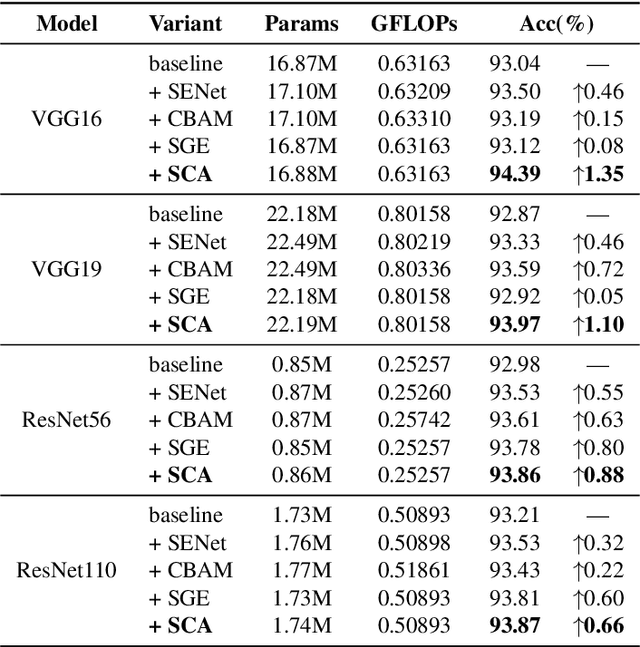
Deep Neural Networks (DNNs) have achieved remarkable success in many computer vision tasks recently, but the huge number of parameters and the high computation overhead hinder their deployments on resource-constrained edge devices. It is worth noting that channel pruning is an effective approach for compressing DNN models. A critical challenge is to determine which channels are to be removed, so that the model accuracy will not be negatively affected. In this paper, we first propose Spatial and Channel Attention (SCA), a new attention module combining both spatial and channel attention that respectively focuses on "where" and "what" are the most informative parts. Guided by the scale values generated by SCA for measuring channel importance, we further propose a new channel pruning approach called Channel Pruning guided by Spatial and Channel Attention (CPSCA). Experimental results indicate that SCA achieves the best inference accuracy, while incurring negligibly extra resource consumption, compared to other state-of-the-art attention modules. Our evaluation on two benchmark datasets shows that, with the guidance of SCA, our CPSCA approach achieves higher inference accuracy than other state-of-the-art pruning methods under the same pruning ratios.