 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Domain Document Object Detection: Benchmark Suite and Method
Mar 30, 2020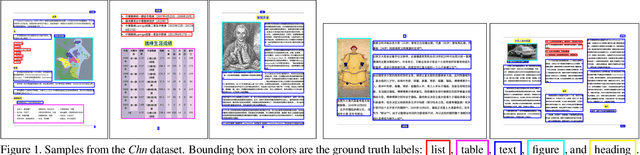
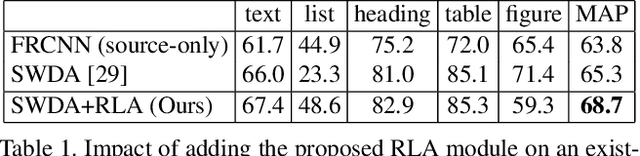
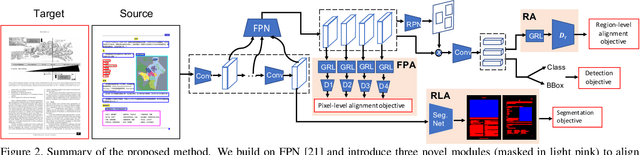
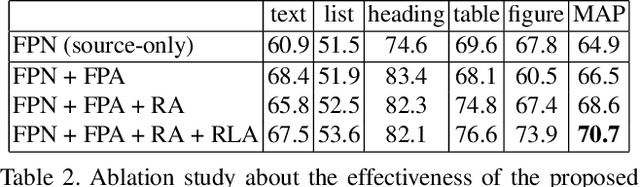
Decomposing images of document pages into high-level semantic regions (e.g., figures, tables, paragraphs), document object detection (DOD) is fundamental for downstream tasks like intelligent document editing and understanding. DOD remains a challenging problem as document objects vary significantly in layout, size, aspect ratio, texture, etc. An additional challenge arises in practice because large labeled training datasets are only available for domains that differ from the target domain. We investigate cross-domain DOD, where the goal is to learn a detector for the target domain using labeled data from the source domain and only unlabeled data from the target domain. Documents from the two domains may vary significantly in layout, language, and genre. We establish a benchmark suite consisting of different types of PDF document datasets that can be utilized for cross-domain DOD model training and evaluation. For each dataset, we provide the page images, bounding box annotations, PDF files, and the rendering layers extracted from the PDF files. Moreover, we propose a novel cross-domain DOD model which builds upon the standard detection model and addresses domain shifts by incorporating three novel alignment modules: Feature Pyramid Alignment (FPA) module, Region Alignment (RA) module and Rendering Layer alignment (RLA) module. Extensive experiments on the benchmark suite substantiate the efficacy of the three proposed modules and the proposed method significantly outperforms the baseline methods. The project page is at \url{https://github.com/kailigo/cddod}.
Referring to Objects in Videos using Spatio-Temporal Identifying Descriptions
Apr 08, 2019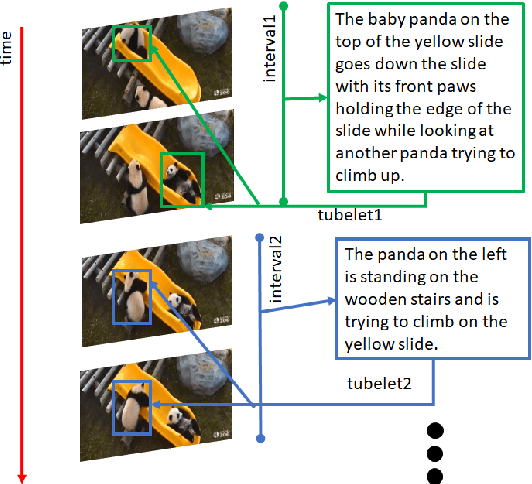
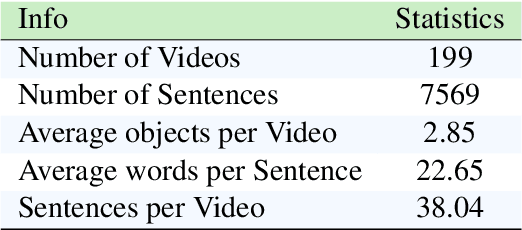
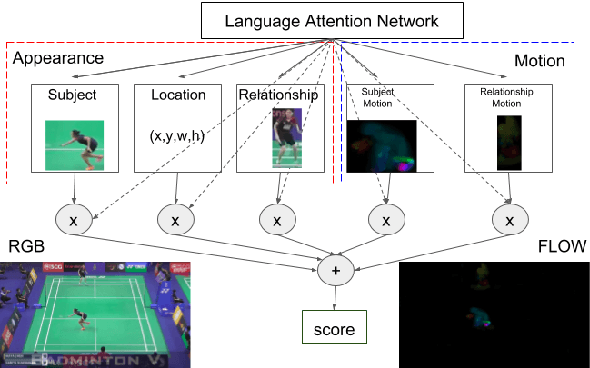
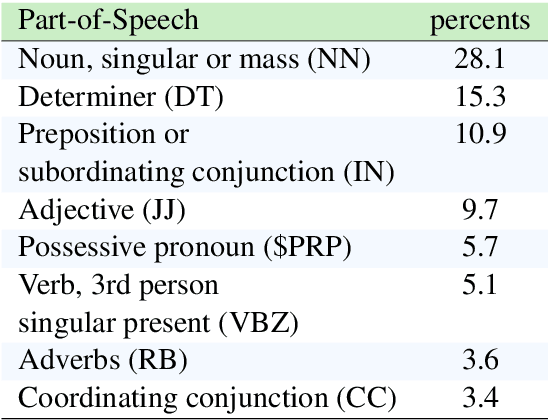
This paper presents a new task, the grounding of spatio-temporal identifying descriptions in videos. Previous work suggests potential bias in existing datasets and emphasizes the need for a new data creation schema to better model linguistic structure. We introduce a new data collection scheme based on grammatical constraints for surface realization to enable us to investigate the problem of grounding spatio-temporal identifying descriptions in videos. We then propose a two-stream modular attention network that learns and grounds spatio-temporal identifying descriptions based on appearance and motion. We show that motion modules help to ground motion-related words and also help to learn in appearance modules because modular neural networks resolve task interference between modules. Finally, we propose a future challenge and a need for a robust system arising from replacing ground truth visual annotations with automatic video object detector and temporal event localization.
C-WSL: Count-guided Weakly Supervised Localization
Jul 25, 2018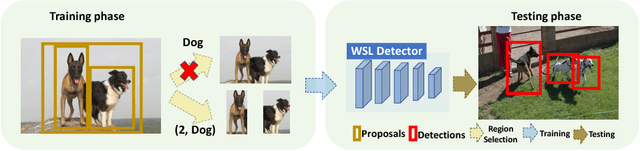
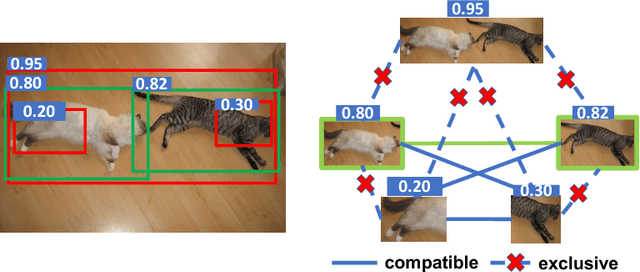
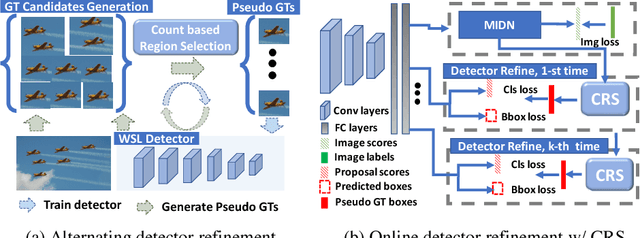
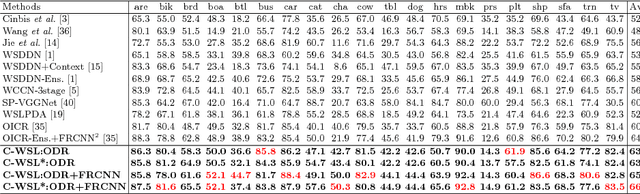
We introduce count-guided weakly supervised localization (C-WSL), an approach that uses per-class object count as a new form of supervision to improve weakly supervised localization (WSL). C-WSL uses a simple count-based region selection algorithm to select high-quality regions, each of which covers a single object instance during training, and improves existing WSL methods by training with the selected regions. To demonstrate the effectiveness of C-WSL, we integrate it into two WSL architectures and conduct extensive experiments on VOC2007 and VOC2012. Experimental results show that C-WSL leads to large improvements in WSL and that the proposed approach significantly outperforms the state-of-the-art methods. The results of annotation experiments on VOC2007 suggest that a modest extra time is needed to obtain per-class object counts compared to labeling only object categories in an image. Furthermore, we reduce the annotation time by more than $2\times$ and $38\times$ compared to center-click and bounding-box annotations.
Learning a Discriminative Filter Bank within a CNN for Fine-grained Recognition
Jun 12, 2018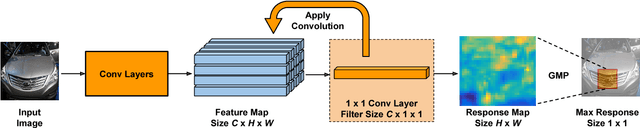
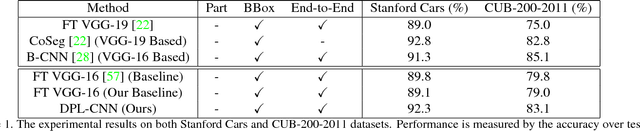
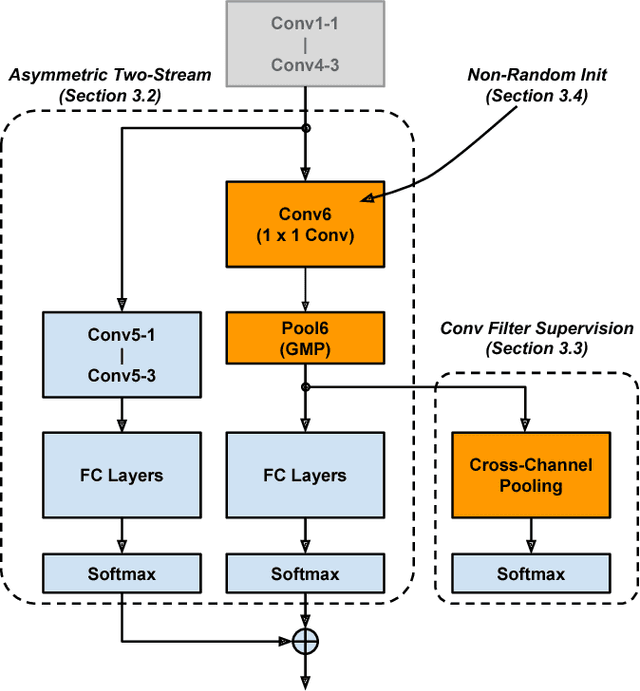
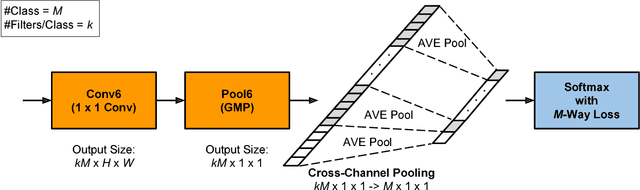
Compared to earlier multistage frameworks using CNN features, recent end-to-end deep approaches for fine-grained recognition essentially enhance the mid-level learning capability of CNNs. Previous approaches achieve this by introducing an auxiliary network to infuse localization information into the main classification network, or a sophisticated feature encoding method to capture higher order feature statistics. We show that mid-level representation learning can be enhanced within the CNN framework, by learning a bank of convolutional filters that capture class-specific discriminative patches without extra part or bounding box annotations. Such a filter bank is well structured, properly initialized and discriminatively learned through a novel asymmetric multi-stream architecture with convolutional filter supervision and a non-random layer initialization. Experimental results show that our approach achieves state-of-the-art on three publicly available fine-grained recognition datasets (CUB-200-2011, Stanford Cars and FGVC-Aircraft). Ablation studies and visualizations are provided to understand our approach.
Learning Rich Features for Image Manipulation Detection
May 13, 2018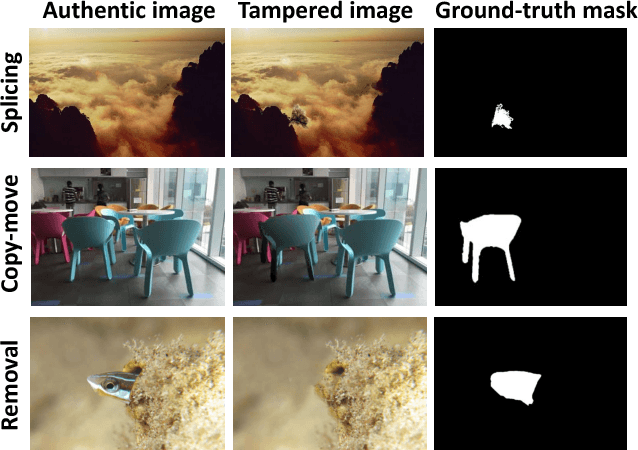
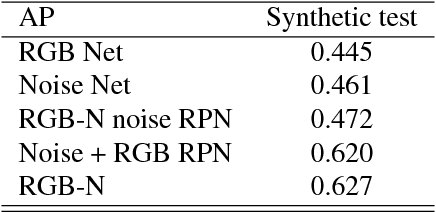
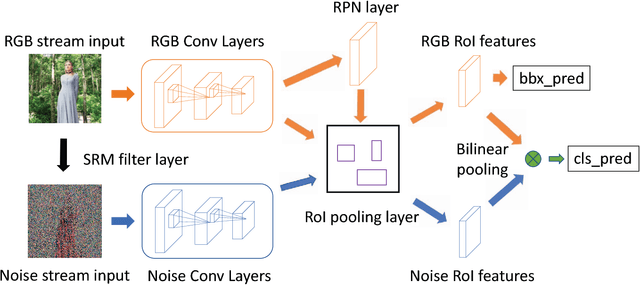
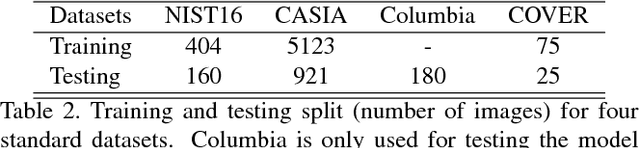
Image manipulation detection is different from traditional semantic object detection because it pays more attention to tampering artifacts than to image content, which suggests that richer features need to be learned. We propose a two-stream Faster R-CNN network and train it endto- end to detect the tampered regions given a manipulated image. One of the two streams is an RGB stream whose purpose is to extract features from the RGB image input to find tampering artifacts like strong contrast difference, unnatural tampered boundaries, and so on. The other is a noise stream that leverages the noise features extracted from a steganalysis rich model filter layer to discover the noise inconsistency between authentic and tampered regions. We then fuse features from the two streams through a bilinear pooling layer to further incorporate spatial co-occurrence of these two modalities. Experiments on four standard image manipulation datasets demonstrate that our two-stream framework outperforms each individual stream, and also achieves state-of-the-art performance compared to alternative methods with robustness to resizing and compression.
Fused Deep Neural Networks for Efficient Pedestrian Detection
May 02, 2018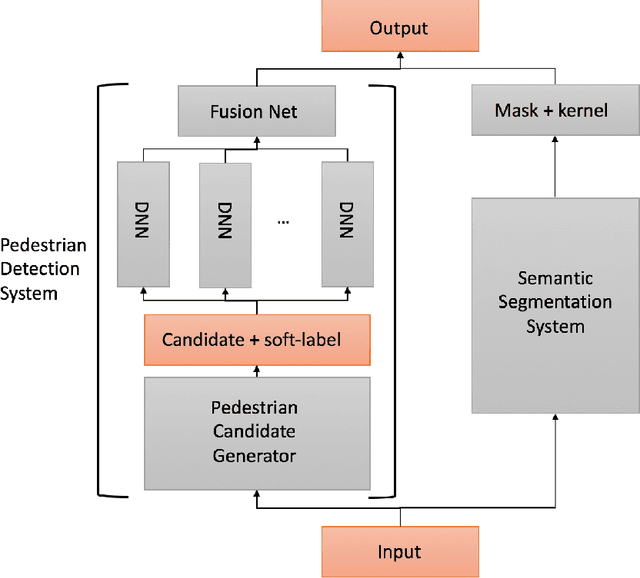
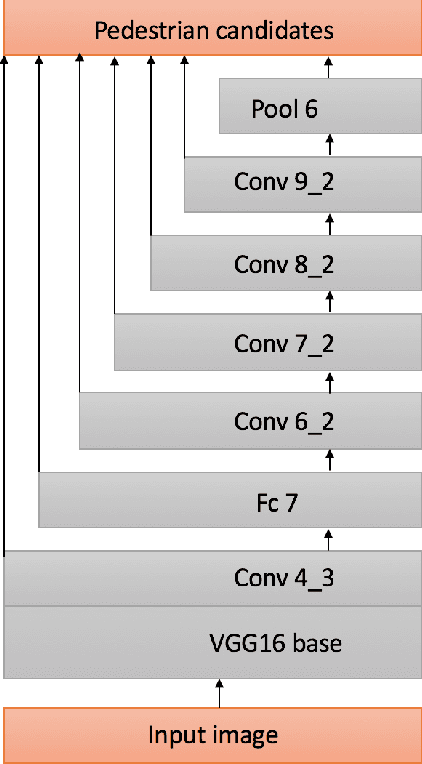
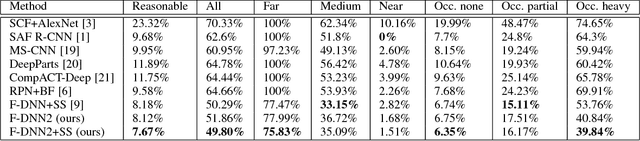
In this paper, we present an efficient pedestrian detection system, designed by fusion of multiple deep neural network (DNN) systems. Pedestrian candidates are first generated by a single shot convolutional multi-box detector at different locations with various scales and aspect ratios. The candidate generator is designed to provide the majority of ground truth pedestrian annotations at the cost of a large number of false positives. Then, a classification system using the idea of ensemble learning is deployed to improve the detection accuracy. The classification system further classifies the generated candidates based on opinions of multiple deep verification networks and a fusion network which utilizes a novel soft-rejection fusion method to adjust the confidence in the detection results. To improve the training of the deep verification networks, a novel soft-label method is devised to assign floating point labels to the generated pedestrian candidates. A deep context aggregation semantic segmentation network also provides pixel-level classification of the scene and its results are softly fused with the detection results by the single shot detector. Our pedestrian detector compared favorably to state-of-art methods on all popular pedestrian detection datasets. For example, our fused DNN has better detection accuracy on the Caltech Pedestrian dataset than all previous state of art methods, while also being the fastest. We significantly improved the log-average miss rate on the Caltech pedestrian dataset to 7.67% and achieved the new state-of-the-art.
Representing Videos based on Scene Layouts for Recognizing Agent-in-Place Actions
Apr 04, 2018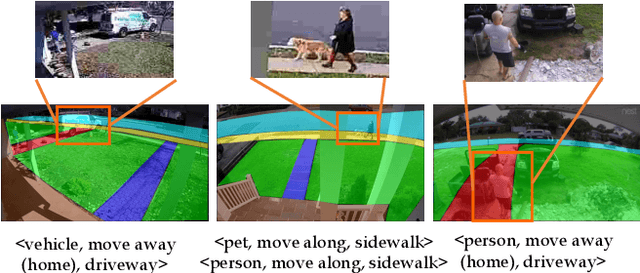
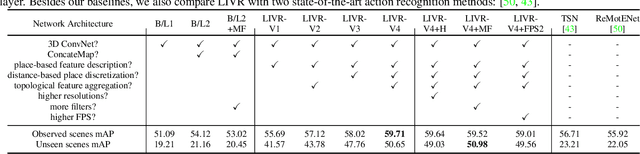
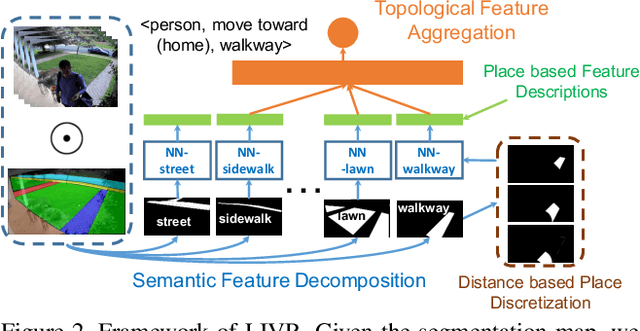
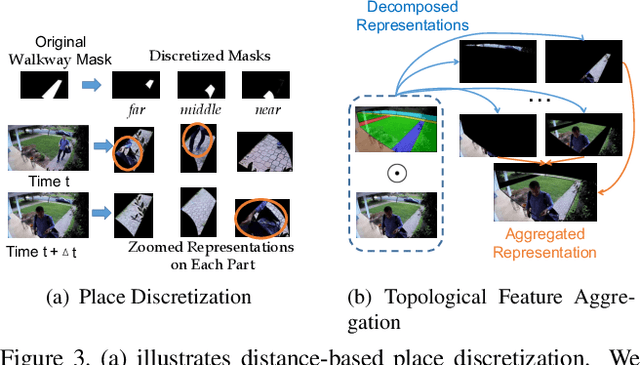
We address the recognition of agent-in-place actions, which are associated with agents who perform them and places where they occur, in the context of outdoor home surveillance. We introduce a representation of the geometry and topology of scene layouts so that a network can generalize from the layouts observed in the training set to unseen layouts in the test set. This Layout-Induced Video Representation (LIVR) abstracts away low-level appearance variance and encodes geometric and topological relationships of places in a specific scene layout. LIVR partitions the semantic features of a video clip into different places to force the network to learn place-based feature descriptions; to predict the confidence of each action, LIVR aggregates features from the place associated with an action and its adjacent places on the scene layout. We introduce the Agent-in-Place Action dataset to show that our method allows neural network models to generalize significantly better to unseen scenes.
Two-Stream Neural Networks for Tampered Face Detection
Mar 29, 2018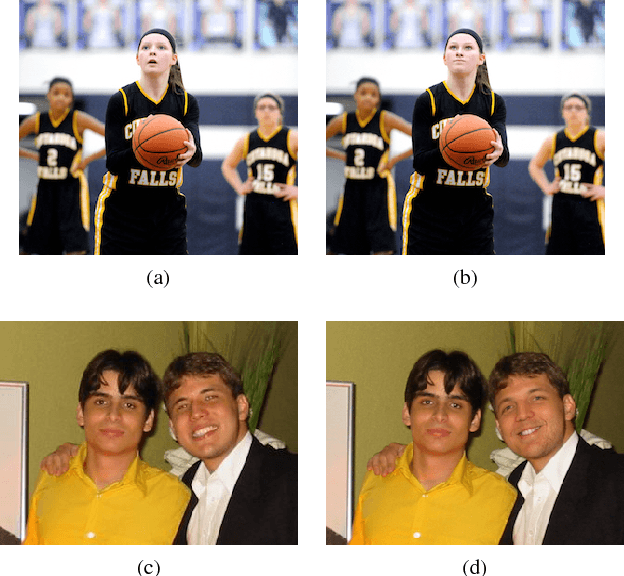
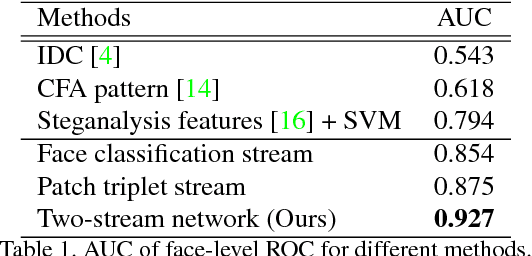
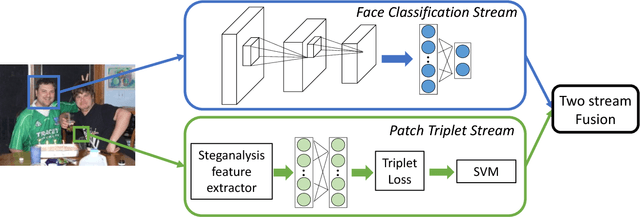
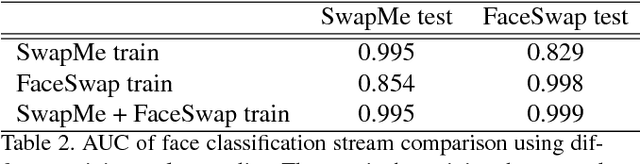
We propose a two-stream network for face tampering detection. We train GoogLeNet to detect tampering artifacts in a face classification stream, and train a patch based triplet network to leverage features capturing local noise residuals and camera characteristics as a second stream. In addition, we use two different online face swapping applications to create a new dataset that consists of 2010 tampered images, each of which contains a tampered face. We evaluate the proposed two-stream network on our newly collected dataset. Experimental results demonstrate the effectiveness of our method.
Dynamic Zoom-in Network for Fast Object Detection in Large Images
Mar 27, 2018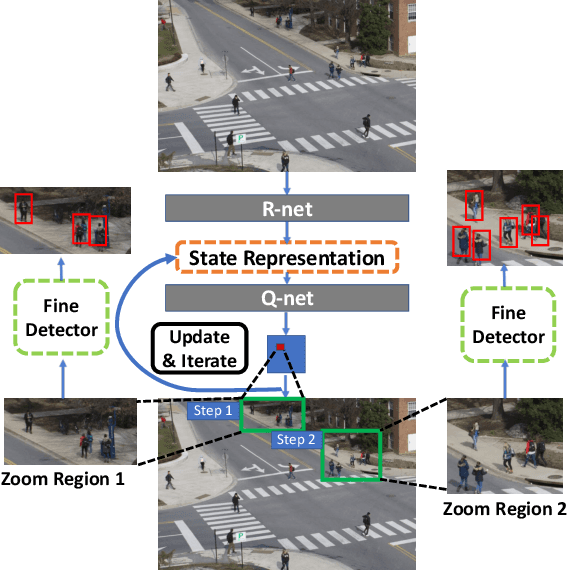
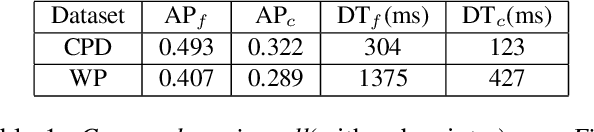
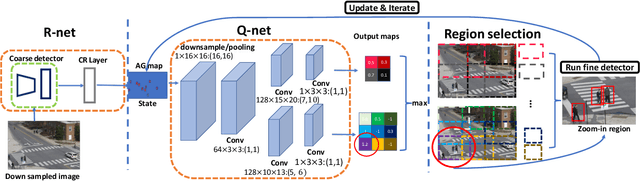
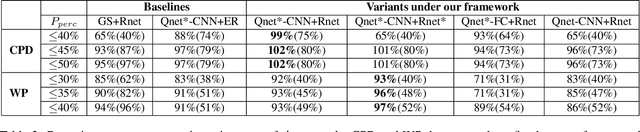
We introduce a generic framework that reduces the computational cost of object detection while retaining accuracy for scenarios where objects with varied sizes appear in high resolution images. Detection progresses in a coarse-to-fine manner, first on a down-sampled version of the image and then on a sequence of higher resolution regions identified as likely to improve the detection accuracy. Built upon reinforcement learning, our approach consists of a model (R-net) that uses coarse detection results to predict the potential accuracy gain for analyzing a region at a higher resolution and another model (Q-net) that sequentially selects regions to zoom in. Experiments on the Caltech Pedestrians dataset show that our approach reduces the number of processed pixels by over 50% without a drop in detection accuracy. The merits of our approach become more significant on a high resolution test set collected from YFCC100M dataset, where our approach maintains high detection performance while reducing the number of processed pixels by about 70% and the detection time by over 50%.
NISP: Pruning Networks using Neuron Importance Score Propagation
Mar 21, 2018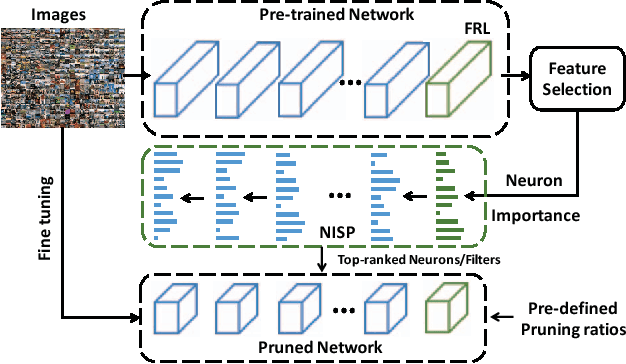
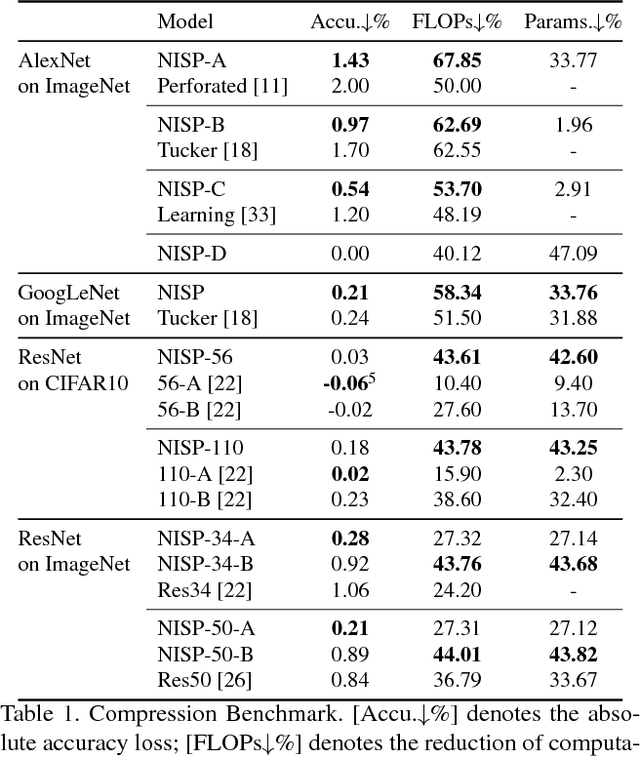
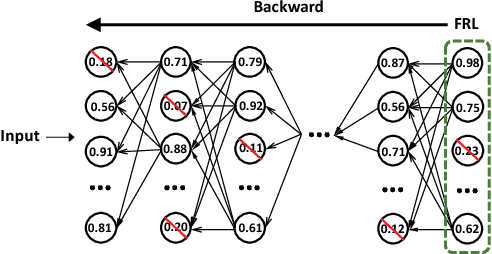
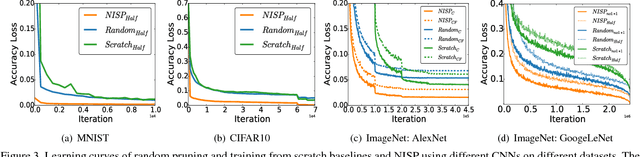
To reduce the significant redundancy in deep Convolutional Neural Networks (CNNs), most existing methods prune neurons by only considering statistics of an individual layer or two consecutive layers (e.g., prune one layer to minimize the reconstruction error of the next layer), ignoring the effect of error propagation in deep networks. In contrast, we argue that it is essential to prune neurons in the entire neuron network jointly based on a unified goal: minimizing the reconstruction error of important responses in the "final response layer" (FRL), which is the second-to-last layer before classification, for a pruned network to retrain its predictive power. Specifically, we apply feature ranking techniques to measure the importance of each neuron in the FRL, and formulate network pruning as a binary integer optimization problem and derive a closed-form solution to it for pruning neurons in earlier layers. Based on our theoretical analysis, we propose the Neuron Importance Score Propagation (NISP) algorithm to propagate the importance scores of final responses to every neuron in the network. The CNN is pruned by removing neurons with least importance, and then fine-tuned to retain its predictive power. NISP is evaluated on several datasets with multiple CNN models and demonstrated to achieve significant acceleration and compression with negligible accuracy loss.