 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Mean of Multi-Object Trajectories
Apr 29, 2025



This paper introduces the concept of a mean for trajectories and multi-object trajectories--sets or multi-sets of trajectories--along with algorithms for computing them. Specifically, we use the Fr\'{e}chet mean, and metrics based on the optimal sub-pattern assignment (OSPA) construct, to extend the notion of average from vectors to trajectories and multi-object trajectories. Further, we develop efficient algorithms to compute these means using greedy search and Gibbs sampling. Using distributed multi-object tracking as an application, we demonstrate that the Fr\'{e}chet mean approach to multi-object trajectory consensus significantly outperforms state-of-the-art distributed multi-object tracking methods.
An Overview of Multi-Object Estimation via Labeled Random Finite Set
Sep 27, 2024



This article presents the Labeled Random Finite Set (LRFS) framework for multi-object systems-systems in which the number of objects and their states are unknown and vary randomly with time. In particular, we focus on state and trajectory estimation via a multi-object State Space Model (SSM) that admits principled tractable multi-object tracking filters/smoothers. Unlike the single-object counterpart, a time sequence of states does not necessarily represent the trajectory of a multi-object system. The LRFS formulation enables a time sequence of multi-object states to represent the multi-object trajectory that accommodates trajectory crossings and fragmentations. We present the basics of LRFS, covering a suite of commonly used models and mathematical apparatus (including the latest results not published elsewhere). Building on this, we outline the fundamentals of multi-object state space modeling and estimation using LRFS, which formally address object identities/trajectories, ancestries for spawning objects, and characterization of the uncertainty on the ensemble of objects (and their trajectories). Numerical solutions to multi-object SSM problems are inherently far more challenging than those in standard SSM. To bridge the gap between theory and practice, we discuss state-of-the-art implementations that address key computational bottlenecks in the number of objects, measurements, sensors, and scans.
Visual Multi-Object Tracking with Re-Identification and Occlusion Handling using Labeled Random Finite Sets
Jul 11, 2024



This paper proposes an online visual multi-object tracking (MOT) algorithm that resolves object appearance-reappearance and occlusion. Our solution is based on the labeled random finite set (LRFS) filtering approach, which in principle, addresses disappearance, appearance, reappearance, and occlusion via a single Bayesian recursion. However, in practice, existing numerical approximations cause reappearing objects to be initialized as new tracks, especially after long periods of being undetected. In occlusion handling, the filter's efficacy is dictated by trade-offs between the sophistication of the occlusion model and computational demand. Our contribution is a novel modeling method that exploits object features to address reappearing objects whilst maintaining a linear complexity in the number of detections. Moreover, to improve the filter's occlusion handling, we propose a fuzzy detection model that takes into consideration the overlapping areas between tracks and their sizes. We also develop a fast version of the filter to further reduce the computational time.
Track Initialization and Re-Identification for~3D Multi-View Multi-Object Tracking
May 28, 2024



We propose a 3D multi-object tracking (MOT) solution using only 2D detections from monocular cameras, which automatically initiates/terminates tracks as well as resolves track appearance-reappearance and occlusions. Moreover, this approach does not require detector retraining when cameras are reconfigured but only the camera matrices of reconfigured cameras need to be updated. Our approach is based on a Bayesian multi-object formulation that integrates track initiation/termination, re-identification, occlusion handling, and data association into a single Bayes filtering recursion. However, the exact filter that utilizes all these functionalities is numerically intractable due to the exponentially growing number of terms in the (multi-object) filtering density, while existing approximations trade-off some of these functionalities for speed. To this end, we develop a more efficient approximation suitable for online MOT by incorporating object features and kinematics into the measurement model, which improves data association and subsequently reduces the number of terms. Specifically, we exploit the 2D detections and extracted features from multiple cameras to provide a better approximation of the multi-object filtering density to realize the track initiation/termination and re-identification functionalities. Further, incorporating a tractable geometric occlusion model based on 2D projections of 3D objects on the camera planes realizes the occlusion handling functionality of the filter. Evaluation of the proposed solution on challenging datasets demonstrates significant improvements and robustness when camera configurations change on-the-fly, compared to existing multi-view MOT solutions. The source code is publicly available at https://github.com/linh-gist/mv-glmb-ab.
The Smooth Trajectory Estimator for LMB Filters
Jan 01, 2024This paper proposes a smooth-trajectory estimator for the labelled multi-Bernoulli (LMB) filter by exploiting the special structure of the generalised labelled multi-Bernoulli (GLMB) filter. We devise a simple and intuitive approach to store the best association map when approximating the GLMB random finite set (RFS) to the LMB RFS. In particular, we construct a smooth-trajectory estimator (i.e., an estimator over the entire trajectories of labelled estimates) for the LMB filter based on the history of the best association map and all of the measurements up to the current time. Experimental results under two challenging scenarios demonstrate significant tracking accuracy improvements with negligible additional computational time compared to the conventional LMB filter. The source code is publicly available at https://tinyurl.com/ste-lmb, aimed at promoting advancements in MOT algorithms.
Label Space Partition Selection for Multi-Object Tracking Using Two-Layer Partitioning
Oct 23, 2023


Estimating the trajectories of multi-objects poses a significant challenge due to data association ambiguity, which leads to a substantial increase in computational requirements. To address such problems, a divide-and-conquer manner has been employed with parallel computation. In this strategy, distinguished objects that have unique labels are grouped based on their statistical dependencies, the intersection of predicted measurements. Several geometry approaches have been used for label grouping since finding all intersected label pairs is clearly infeasible for large-scale tracking problems. This paper proposes an efficient implementation of label grouping for label-partitioned generalized labeled multi-Bernoulli filter framework using a secondary partitioning technique. This allows for parallel computation in the label graph indexing step, avoiding generating and eliminating duplicate comparisons. Additionally, we compare the performance of the proposed technique with several efficient spatial searching algorithms. The results demonstrate the superior performance of the proposed approach on large-scale data sets, enabling scalable trajectory estimation.
Robust multi-sensor GLMB filter: An application to multi-target tracking with bearing-only sensors
Jun 01, 2021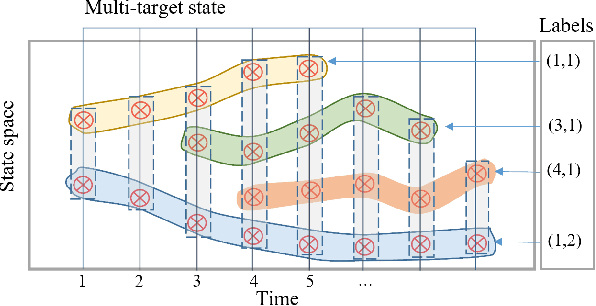
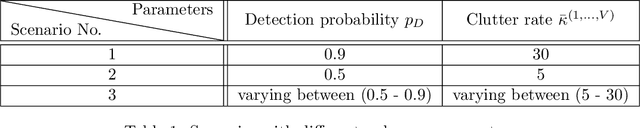
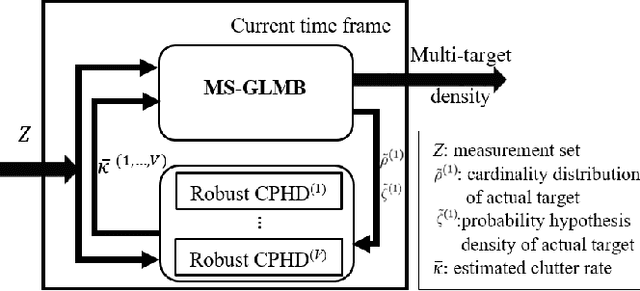

This paper proposes an efficient and robust algorithm to estimate target trajectories via multi-sensor bearing-only measurements with unknown target detection profiles and clutter rates. In particular, we propose to combine the multi-sensor Generalized Labeled Multi-Bernoulli (MS-GLMB) filter to estimate target trajectories and robust Cardinalized Probability Hypothesis Density (CPHD) filters to estimate the clutter rates. Experimental results show that the proposed robust filter exhibits near-optimal performance in the sense that it is comparable to the optimal MS-GLMB operating with the true clutter rate. More importantly, it outperforms other studied filters when the detection profile and clutter rate are unknown an time-variant. This is attributed to the ability of the robust filter to learn the background parameters on-the-fly.
Tracking Cells and their Lineages via Labeled Random Finite Sets
Apr 22, 2021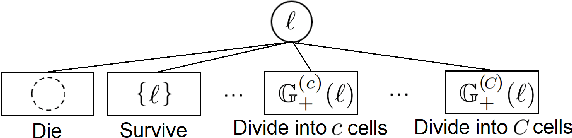
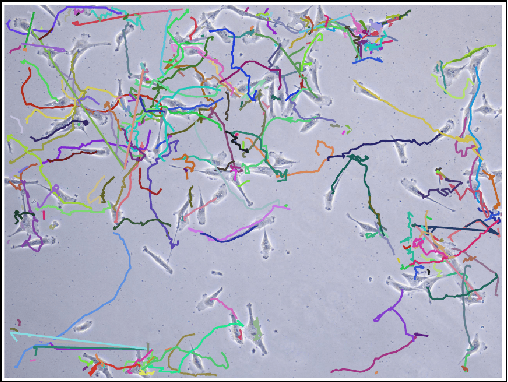
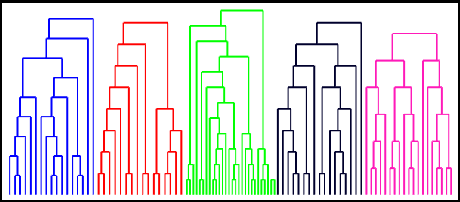
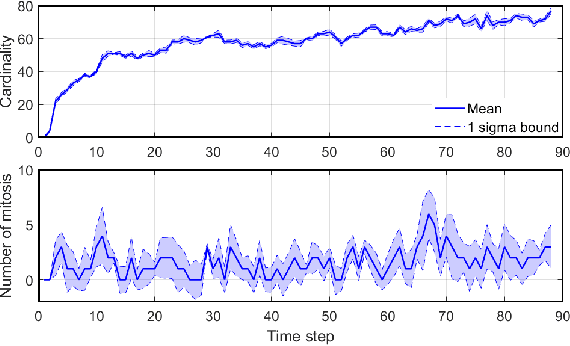
Determining the trajectories of cells and their lineages or ancestries in live-cell experiments are fundamental to the understanding of how cells behave and divide. This paper proposes novel online algorithms for jointly tracking and resolving lineages of an unknown and time-varying number of cells from time-lapse video data. Our approach involves modeling the cell ensemble as a labeled random finite set with labels representing cell identities and lineages. A spawning model is developed to take into account cell lineages and changes in cell appearance prior to division. We then derive analytic filters to propagate multi-object distributions that contain information on the current cell ensemble including their lineages. We also develop numerical implementations of the resulting multi-object filters. Experiments using simulation, synthetic cell migration video, and real time-lapse sequence, are presented to demonstrate the capability of the solutions.
How Trustworthy are the Existing Performance Evaluations for Basic Vision Tasks?
Aug 08, 2020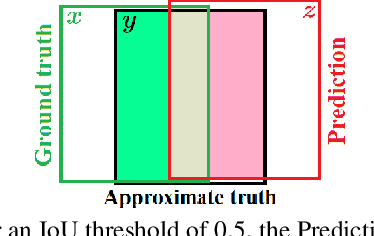
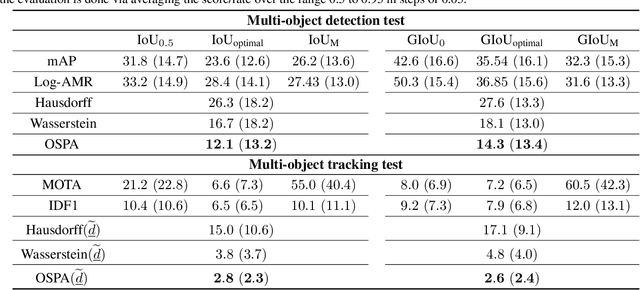
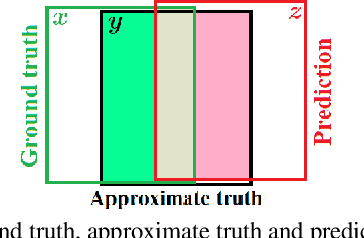
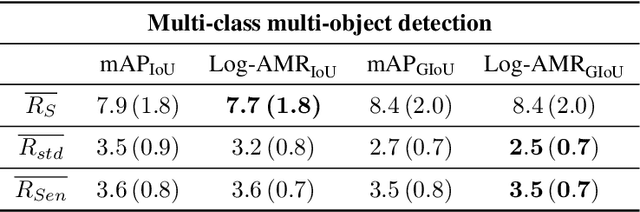
Performance evaluation is indispensable to the advancement of machine vision, yet its consistency and rigour have not received proportionate attention. This paper examines performance evaluation criteria for basic vision tasks namely, object detection, instance-level segmentation and multi-object tracking. Specifically, we advocate the use of criteria that are (i) consistent with mathematical requirements such as the metric properties, (ii) contextually meaningful in sanity tests, and (iii) robust to hyper-parameters for reliability. We show that many widely used performance criteria do not fulfill these requirements. Moreover, we explore alternative criteria for detection, segmentation, and tracking, using metrics for sets of shapes, and assess them against these requirements.