 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive World Simulator for Robot Policy Training and Evaluation
Mar 09, 2026Action-conditioned video prediction models (often referred to as world models) have shown strong potential for robotics applications, but existing approaches are often slow and struggle to capture physically consistent interactions over long horizons, limiting their usefulness for scalable robot policy training and evaluation. We present Interactive World Simulator, a framework for building interactive world models from a moderate-sized robot interaction dataset. Our approach leverages consistency models for both image decoding and latent-space dynamics prediction, enabling fast and stable simulation of physical interactions. In our experiments, the learned world models produce interaction-consistent pixel-level predictions and support stable long-horizon interactions for more than 10 minutes at 15 FPS on a single RTX 4090 GPU. Our framework enables scalable demonstration collection solely within the world models to train state-of-the-art imitation policies. Through extensive real-world evaluation across diverse tasks involving rigid objects, deformable objects, object piles, and their interactions, we find that policies trained on world-model-generated data perform comparably to those trained on the same amount of real-world data. Additionally, we evaluate policies both within the world models and in the real world across diverse tasks, and observe a strong correlation between simulated and real-world performance. Together, these results establish the Interactive World Simulator as a stable and physically consistent surrogate for scalable robotic data generation and faithful, reproducible policy evaluation.
Swim: A General-Purpose, High-Performing, and Efficient Activation Function for Locomotion Control Tasks
Mar 05, 2023



Activation functions play a significant role in the performance of deep learning algorithms. In particular, the Swish activation function tends to outperform ReLU on deeper models, including deep reinforcement learning models, across challenging tasks. Despite this progress, ReLU is the preferred function partly because it is more efficient than Swish. Furthermore, in contrast to the fields of computer vision and natural language processing, the deep reinforcement learning and robotics domains have seen less inclination to adopt new activation functions, such as Swish, and instead continue to use more traditional functions, like ReLU. To tackle those issues, we propose Swim, a general-purpose, efficient, and high-performing alternative to Swish, and then provide an analysis of its properties as well as an explanation for its high-performance relative to Swish, in terms of both reward-achievement and efficiency. We focus on testing Swim on MuJoCo's locomotion continuous control tasks since they exhibit more complex dynamics and would therefore benefit most from a high-performing and efficient activation function. We also use the TD3 algorithm in conjunction with Swim and explain this choice in the context of the robot locomotion domain. We then conclude that Swim is a state-of-the-art activation function for continuous control locomotion tasks and recommend using it with TD3 as a working framework.
Guided Deep Reinforcement Learning for Articulated Swimming Robots
Jan 30, 2023Deep reinforcement learning has recently been applied to a variety of robotics applications, but learning locomotion for robots with unconventional configurations is still limited. Prior work has shown that, despite the simple modeling of articulated swimmer robots, such systems struggle to find effective gaits using reinforcement learning due to the heterogeneity of the search space. In this work, we leverage insight from geometric models of these robots in order to focus on promising regions of the space and guide the learning process. We demonstrate that our augmented learning technique is able to produce gaits for different learning goals for swimmer robots in both low and high Reynolds number fluids.
The Geometric Structure of Externally Actuated Planar Locomoting Systems in Ambient Media
Aug 14, 2021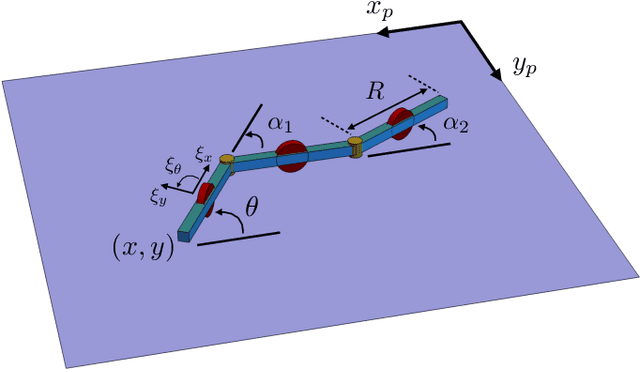
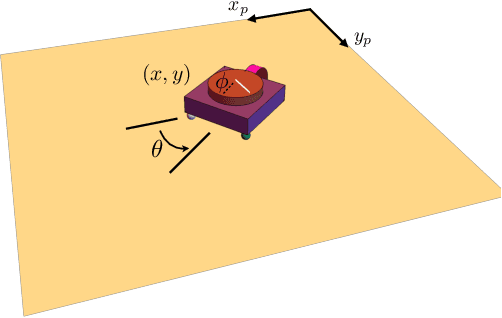
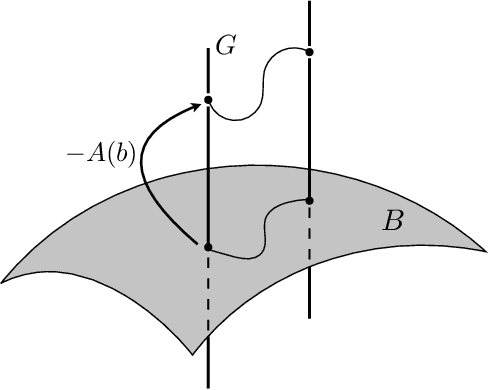
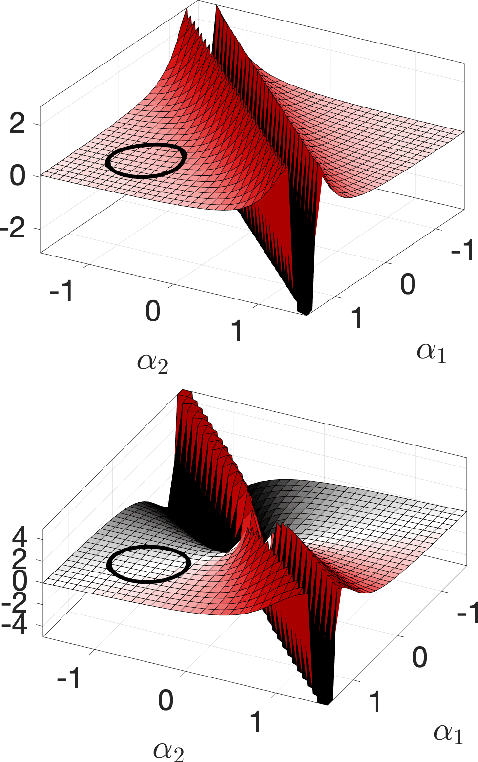
Robots often interact with the world via attached parts such as wheels, joints, or appendages. In many systems, these interactions, and the manner in which they lead to locomotion, can be understood using the machinery of geometric mechanics, explaining how inputs in the shape space of a robot affect motion in its configuration space and the configuration space of its environment. In this paper we consider an opposite type of locomotion, wherein robots are influenced actively by interactions with an externally forced ambient medium. We investigate two examples of externally actuated systems; one for which locomotion is governed by a principal connection, and is usually considered to possess no drift dynamics, and another for which no such connection exists, with drift inherent in its locomotion. For the driftless system, we develop geometric tools based on previously understood internally actuated versions of the system and demonstrate their use for motion planning under external actuation. For the system possessing drift, we employ nonholonomic reduction to obtain a reduced representation of the system dynamics, illustrate geometric features conducive to studying locomotion, and derive strategies for external actuation.