 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo as Natural Augmentation: Towards Unified AI-Generated Image and Video Detection
May 21, 2026AI-generated content (AIGC) is rapidly improving, creating an urgent need for detectors that generalize across data sources, deployment pipelines, and visual modalities. A strongly generalizable detector should remain robust under distributional variations. However, we identify a consistent failure mode: SOTA AI-generated image detectors often collapse when applied to frames extracted from videos. Through systematic analysis, we show that this cross-modal gap arises from both entangled synthesis-agnostic video processing shifts, including color conversion, codec compression, resizing, and blur, and model-specific fingerprints introduced by modern video generators. Motivated by these findings, we propose VINA (Video as Natural Augmentation), a unified AIGC detection framework that jointly trains on image and video data. VINA uses video frames as physically grounded natural augmentations and further introduces a cross-modal supervised contrastive objective to align image and video representations under a shared real/fake decision boundary. Extensive experiments on 14 image, video, and in-the-wild benchmarks show that VINA delivers bidirectional gains, improves robustness and transferability, and achieves state-of-the-art performance across nearly all evaluated settings without complex augmentation or dataset-specific tuning.
Consistency Beyond Contrast: Enhancing Open-Vocabulary Object Detection Robustness via Contextual Consistency Learning
Mar 27, 2026Recent advances in open-vocabulary object detection focus primarily on two aspects: scaling up datasets and leveraging contrastive learning to align language and vision modalities. However, these approaches often neglect internal consistency within a single modality, particularly when background or environmental changes occur. This lack of consistency leads to a performance drop because the model struggles to detect the same object in different scenes, which reveals a robustness gap. To address this issue, we introduce Contextual Consistency Learning (CCL), a novel framework that integrates two key strategies: Contextual Bootstrapped Data Generation (CBDG) and Contextual Consistency Loss (CCLoss). CBDG functions as a data generation mechanism, producing images that contain the same objects across diverse backgrounds. This is essential because existing datasets alone do not support our CCL framework. The CCLoss further enforces the invariance of object features despite environmental changes, thereby improving the model's robustness in different scenes. These strategies collectively form a unified framework for ensuring contextual consistency within the same modality. Our method achieves state-of-the-art performance, surpassing previous approaches by +16.3 AP on OmniLabel and +14.9 AP on D3. These results demonstrate the importance of enforcing intra-modal consistency, significantly enhancing model generalization in diverse environments. Our code is publicly available at: https://github.com/bozhao-li/CCL.
Plug-and-Play Fidelity Optimization for Diffusion Transformer Acceleration via Cumulative Error Minimization
Dec 29, 2025Although Diffusion Transformer (DiT) has emerged as a predominant architecture for image and video generation, its iterative denoising process results in slow inference, which hinders broader applicability and development. Caching-based methods achieve training-free acceleration, while suffering from considerable computational error. Existing methods typically incorporate error correction strategies such as pruning or prediction to mitigate it. However, their fixed caching strategy fails to adapt to the complex error variations during denoising, which limits the full potential of error correction. To tackle this challenge, we propose a novel fidelity-optimization plugin for existing error correction methods via cumulative error minimization, named CEM. CEM predefines the error to characterize the sensitivity of model to acceleration jointly influenced by timesteps and cache intervals. Guided by this prior, we formulate a dynamic programming algorithm with cumulative error approximation for strategy optimization, which achieves the caching error minimization, resulting in a substantial improvement in generation fidelity. CEM is model-agnostic and exhibits strong generalization, which is adaptable to arbitrary acceleration budgets. It can be seamlessly integrated into existing error correction frameworks and quantized models without introducing any additional computational overhead. Extensive experiments conducted on nine generation models and quantized methods across three tasks demonstrate that CEM significantly improves generation fidelity of existing acceleration models, and outperforms the original generation performance on FLUX.1-dev, PixArt-$α$, StableDiffusion1.5 and Hunyuan. The code will be made publicly available.
Binarized Mamba-Transformer for Lightweight Quad Bayer HybridEVS Demosaicing
Mar 20, 2025
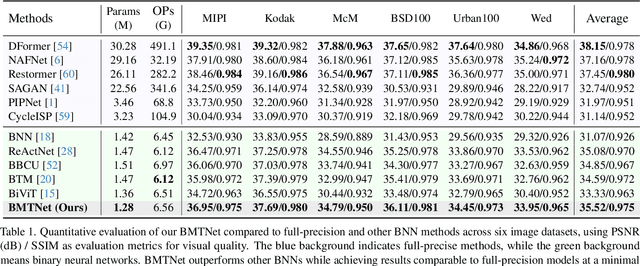
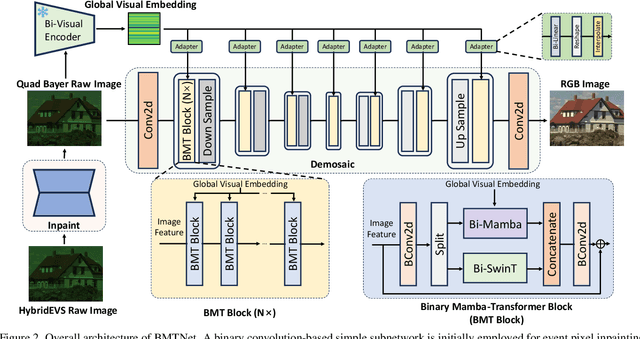

Quad Bayer demosaicing is the central challenge for enabling the widespread application of Hybrid Event-based Vision Sensors (HybridEVS). Although existing learning-based methods that leverage long-range dependency modeling have achieved promising results, their complexity severely limits deployment on mobile devices for real-world applications. To address these limitations, we propose a lightweight Mamba-based binary neural network designed for efficient and high-performing demosaicing of HybridEVS RAW images. First, to effectively capture both global and local dependencies, we introduce a hybrid Binarized Mamba-Transformer architecture that combines the strengths of the Mamba and Swin Transformer architectures. Next, to significantly reduce computational complexity, we propose a binarized Mamba (Bi-Mamba), which binarizes all projections while retaining the core Selective Scan in full precision. Bi-Mamba also incorporates additional global visual information to enhance global context and mitigate precision loss. We conduct quantitative and qualitative experiments to demonstrate the effectiveness of BMTNet in both performance and computational efficiency, providing a lightweight demosaicing solution suited for real-world edge devices. Our codes and models are available at https://github.com/Clausy9/BMTNet.
A Survey of fMRI to Image Reconstruction
Feb 24, 2025

Functional magnetic resonance imaging (fMRI) based image reconstruction plays a pivotal role in decoding human perception, with applications in neuroscience and brain-computer interfaces. While recent advancements in deep learning and large-scale datasets have driven progress, challenges such as data scarcity, cross-subject variability, and low semantic consistency persist. To address these issues, we introduce the concept of fMRI-to-Image Learning (fMRI2Image) and present the first systematic review in this field. This review highlights key challenges, categorizes methodologies such as fMRI signal encoding, feature mapping, and image generator. Finally, promising research directions are proposed to advance this emerging frontier, providing a reference for future studies.
Explore the Potential of CLIP for Training-Free Open Vocabulary Semantic Segmentation
Jul 11, 2024CLIP, as a vision-language model, has significantly advanced Open-Vocabulary Semantic Segmentation (OVSS) with its zero-shot capabilities. Despite its success, its application to OVSS faces challenges due to its initial image-level alignment training, which affects its performance in tasks requiring detailed local context. Our study delves into the impact of CLIP's [CLS] token on patch feature correlations, revealing a dominance of "global" patches that hinders local feature discrimination. To overcome this, we propose CLIPtrase, a novel training-free semantic segmentation strategy that enhances local feature awareness through recalibrated self-correlation among patches. This approach demonstrates notable improvements in segmentation accuracy and the ability to maintain semantic coherence across objects.Experiments show that we are 22.3% ahead of CLIP on average on 9 segmentation benchmarks, outperforming existing state-of-the-art training-free methods.The code are made publicly available at: https://github.com/leaves162/CLIPtrase.