 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Completion in Unseen Field Robotics Environments Using Extremely Sparse Depth Measurements
Feb 03, 2026Autonomous field robots operating in unstructured environments require robust perception to ensure safe and reliable operations. Recent advances in monocular depth estimation have demonstrated the potential of low-cost cameras as depth sensors; however, their adoption in field robotics remains limited due to the absence of reliable scale cues, ambiguous or low-texture conditions, and the scarcity of large-scale datasets. To address these challenges, we propose a depth completion model that trains on synthetic data and uses extremely sparse measurements from depth sensors to predict dense metric depth in unseen field robotics environments. A synthetic dataset generation pipeline tailored to field robotics enables the creation of multiple realistic datasets for training purposes. This dataset generation approach utilizes textured 3D meshes from Structure from Motion and photorealistic rendering with novel viewpoint synthesis to simulate diverse field robotics scenarios. Our approach achieves an end-to-end latency of 53 ms per frame on a Nvidia Jetson AGX Orin, enabling real-time deployment on embedded platforms. Extensive evaluation demonstrates competitive performance across diverse real-world field robotics scenarios.
Allocation for Omnidirectional Aerial Robots: Incorporating Power Dynamics
Dec 20, 2024



Tilt-rotor aerial robots are more dynamic and versatile than their fixed-rotor counterparts, since the thrust vector and body orientation are decoupled. However, the coordination of servomotors and propellers (the allocation problem) is not trivial, especially accounting for overactuation and actuator dynamics. We present and compare different methods of actuator allocation for tilt-rotor platforms, evaluating them on a real aerial robot performing dynamic trajectories. We extend the state-of-the-art geometric allocation into a differential allocation, which uses the platform's redundancy and does not suffer from singularities typical of the geometric solution. We expand it by incorporating actuator dynamics and introducing propeller limit curves. These improve the modeling of propeller limits, automatically balancing their usage and allowing the platform to selectively activate and deactivate propellers during flight. We show that actuator dynamics and limits make the tuning of the allocation not only easier, but also allow it to track more dynamic oscillating trajectories with angular velocities up to 4 rad/s, compared to 2.8 rad/s of geometric methods.
Radar Meets Vision: Robustifying Monocular Metric Depth Prediction for Mobile Robotics
Oct 01, 2024



Mobile robots require accurate and robust depth measurements to understand and interact with the environment. While existing sensing modalities address this problem to some extent, recent research on monocular depth estimation has leveraged the information richness, yet low cost and simplicity of monocular cameras. These works have shown significant generalization capabilities, mainly in automotive and indoor settings. However, robots often operate in environments with limited scale cues, self-similar appearances, and low texture. In this work, we encode measurements from a low-cost mmWave radar into the input space of a state-of-the-art monocular depth estimation model. Despite the radar's extreme point cloud sparsity, our method demonstrates generalization and robustness across industrial and outdoor experiments. Our approach reduces the absolute relative error of depth predictions by 9-64% across a range of unseen, real-world validation datasets. Importantly, we maintain consistency of all performance metrics across all experiments and scene depths where current vision-only approaches fail. We further address the present deficit of training data in mobile robotics environments by introducing a novel methodology for synthesizing rendered, realistic learning datasets based on photogrammetric data that simulate the radar sensor observations for training. Our code, datasets, and pre-trained networks are made available at https://github.com/ethz-asl/radarmeetsvision.
WindSeer: Real-time volumetric wind prediction over complex terrain aboard a small UAV
Jan 18, 2024



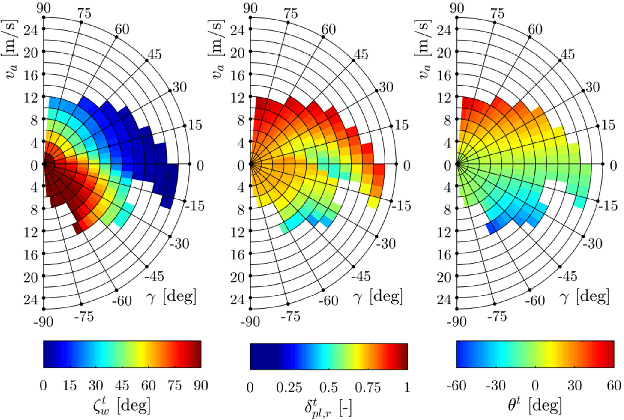
Real-time high-resolution wind predictions are beneficial for various applications including safe manned and unmanned aviation. Current weather models require too much compute and lack the necessary predictive capabilities as they are valid only at the scale of multiple kilometers and hours - much lower spatial and temporal resolutions than these applications require. Our work, for the first time, demonstrates the ability to predict low-altitude wind in real-time on limited-compute devices, from only sparse measurement data. We train a neural network, WindSeer, using only synthetic data from computational fluid dynamics simulations and show that it can successfully predict real wind fields over terrain with known topography from just a few noisy and spatially clustered wind measurements. WindSeer can generate accurate predictions at different resolutions and domain sizes on previously unseen topography without retraining. We demonstrate that the model successfully predicts historical wind data collected by weather stations and wind measured onboard drones.
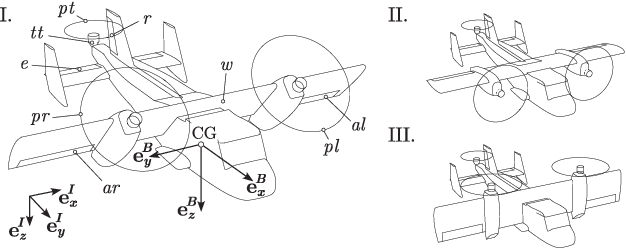
Soliro -- a hybrid dynamic tilt-wing aerial manipulator with minimal actuators
Dec 08, 2023


The ability to enter in contact with and manipulate physical objects with a flying robot enables many novel applications, such as contact inspection, painting, drilling, and sample collection. Generally, these aerial robots need more degrees of freedom than a standard quadrotor. While there is active research of over-actuated, omnidirectional MAVs and aerial manipulators as well as VTOL and hybrid platforms, the two concepts have not been combined. We address the problem of conceptualization, characterization, control, and testing of a 5DOF rotary-/fixed-wing hybrid, tilt-rotor, split tilt-wing, nearly omnidirectional aerial robot. We present an elegant solution with a minimal set of actuators and that does not need any classical control surfaces or flaps. The concept is validated in a wind tunnel study and in multiple flights with forward and backward transitions. Fixed-wing flight speeds up to 10 m/s were reached, with a power reduction of 30% as compared to rotary wing flight.
Long-Duration Fully Autonomous Operation of Rotorcraft Unmanned Aerial Systems for Remote-Sensing Data Acquisition
Aug 18, 2019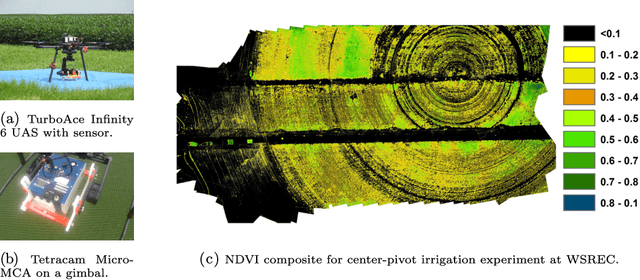
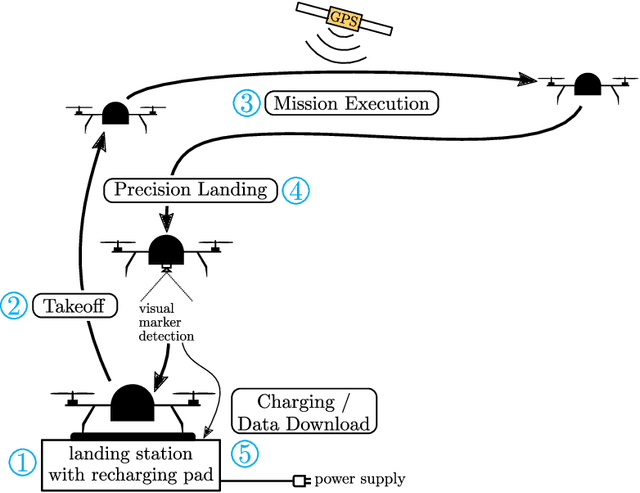
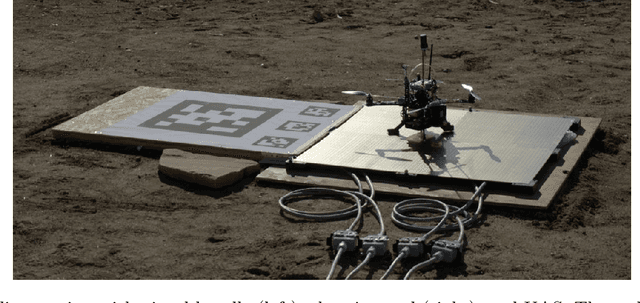
Recent applications of unmanned aerial systems (UAS) to precision agriculture have shown increased ease and efficiency in data collection at precise remote locations. However, further enhancement of the field requires operation over long periods of time, e.g. days or weeks. This has so far been impractical due to the limited flight times of such platforms and the requirement of humans in the loop for operation. To overcome these limitations, we propose a fully autonomous rotorcraft UAS that is capable of performing repeated flights for long-term observation missions without any human intervention. We address two key technologies that are critical for such a system: full platform autonomy to enable mission execution independently from human operators and the ability of vision-based precision landing on a recharging station for automated energy replenishment. High-level autonomous decision making is implemented as a hierarchy of master and slave state machines. Vision-based precision landing is enabled by estimating the landing pad's pose using a bundle of AprilTag fiducials configured for detection from a wide range of altitudes. We provide an extensive evaluation of the landing pad pose estimation accuracy as a function of the bundle's geometry. The functionality of the complete system is demonstrated through two indoor experiments with a duration of 11 and 10.6 hours, and one outdoor experiment with a duration of 4 hours. The UAS executed 16, 48 and 22 flights respectively during these experiments. In the outdoor experiment, the ratio between flying to collect data and charging was 1 to 10, which is similar to past work in this domain. All flights were fully autonomous with no human in the loop. To our best knowledge this is the first research publication about the long-term outdoor operation of a quadrotor system with no human interaction.
* 38 pages, 28 figures
Disturbance Estimation and Rejection for High-Precision Multirotor Position Control
Aug 08, 2019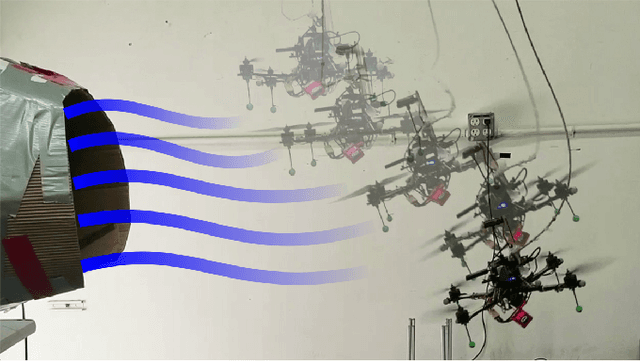
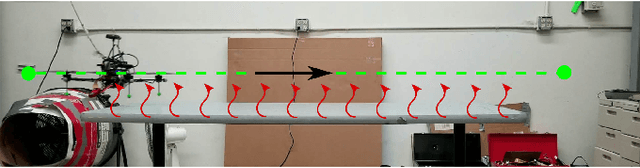
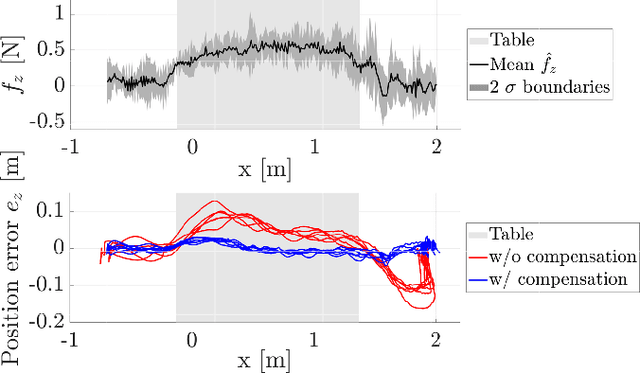
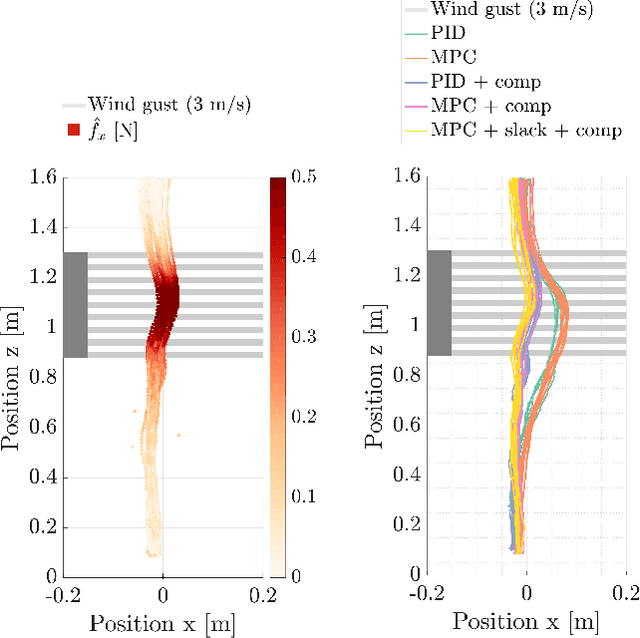
Many multirotor Unmanned Aerial Systems applications have a critical need for precise position control in environments with strong dynamic external disturbances such as wind gusts or ground and wall effects. Moreover, to maximize flight time, small multirotor platforms have to operate within strict constraints on payload and thus computational performance. In this paper, we present the design and experimental comparison of Model Predictive and PID multirotor position controllers augmented with a disturbance estimator to reject strong wind gusts up to 12 m/s and ground effect. For disturbance estimation, we compare Extended and Unscented Kalman filtering. In extensive in- and outdoor flight tests, we evaluate the suitability of the developed control and estimation algorithms to run on a computationally constrained platform. This allows to draw a conclusion on whether potential performance improvements justify the increased computational complexity of MPC for multirotor position control and UKF for disturbance estimation.
On Flying Backwards: Preventing Run-away of Small, Low-speed, Fixed-wing UAVs in Strong Winds
Aug 04, 2019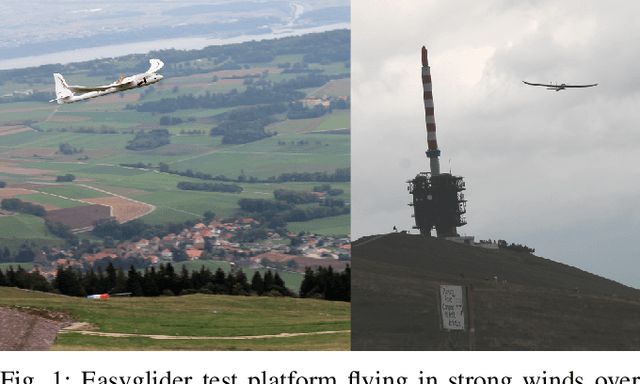
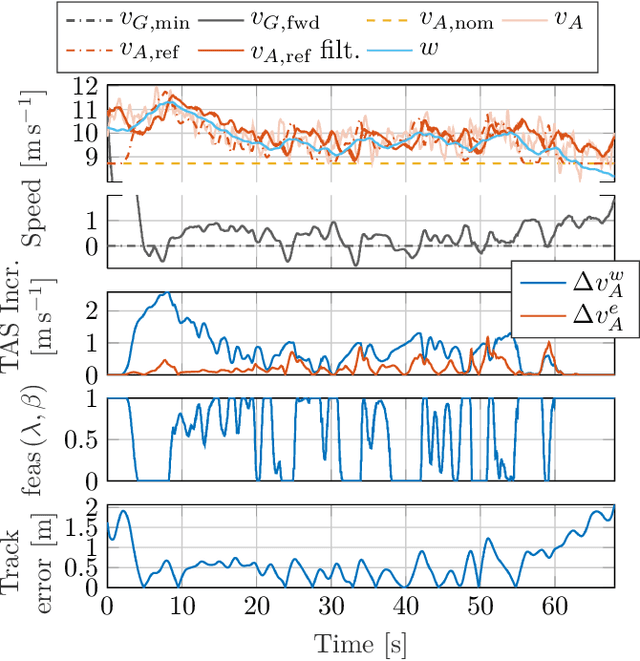

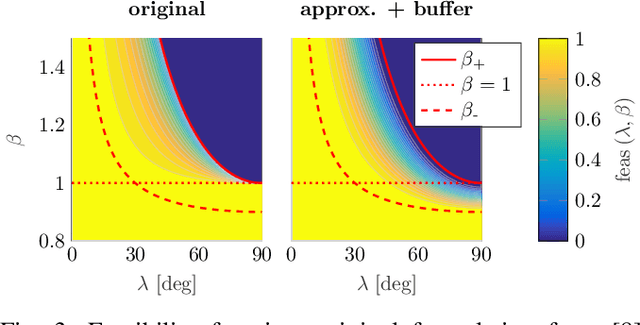
Small, low-speed fixed-wing Unmanned Aerial Vehicles (UAVs) operating autonomously, beyond-visual-line-of-sight (BVLOS) will inevitably encounter winds rising to levels near or exceeding the vehicles' nominal airspeed. In this paper, we develop a nonlinear lateral-directional path following guidance law with explicit consideration of online wind estimates. Energy efficient airspeed reference compensation logic is developed for excess wind scenarios (i.e. when the wind speed rises above the airspeed), enabling either mitigation, prevention, or over-powering of excess wind induced run-away from a given path. The developed guidance law is demonstrated on a representative small, low-speed test UAV in two flight experiments conducted in mountainous regions of Switzerland with strong, turbulent wind conditions, gusts reaching up to 13 meters per second. We demonstrate track-keeping errors of less than 1 meter consistently maintained during a representative duration of gusting, excess winds and a mean ground speed undershoot of 0.5 meters per second from the commanded minimum forward ground speed demonstrated in over 5 minutes of the showcased flight results.
Attitude- and Cruise Control of a VTOL Tiltwing UAV
Mar 25, 2019
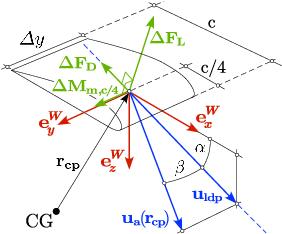
This paper presents the mathematical modeling, controller design, and flight-testing of an over-actuated Vertical Take-off and Landing (VTOL) tiltwing Unmanned Aerial Vehicle (UAV). Based on simplified aerodynamics and first-principles, a dynamical model of the UAV is developed which captures key aerodynamic effects including propeller slipstream on the wing and post-stall characteristics of the airfoils. The model-based steady-state flight envelope and the corresponding trim-actuation is analyzed and the overactuation of the UAV solved by optimizing for, e.g., power-optimal trims. The developed control system is composed of two controllers: First, a low-level attitude controller based on dynamic inversion and a daisy-chaining approach to handle allocation of redundant actuators. Secondly, a higher-level cruise controller to track a desired vertical velocity. It is based on a linearization of the system and look-up tables to determine the strong and nonlinear variation of the trims throughout the flight-envelope. We demonstrate the performance of the control-system for all flight phases (hover, transition, cruise) in extensive flight-tests.
L1 guidance logic extension for small UAVs: handling high winds and small loiter radii
May 23, 2018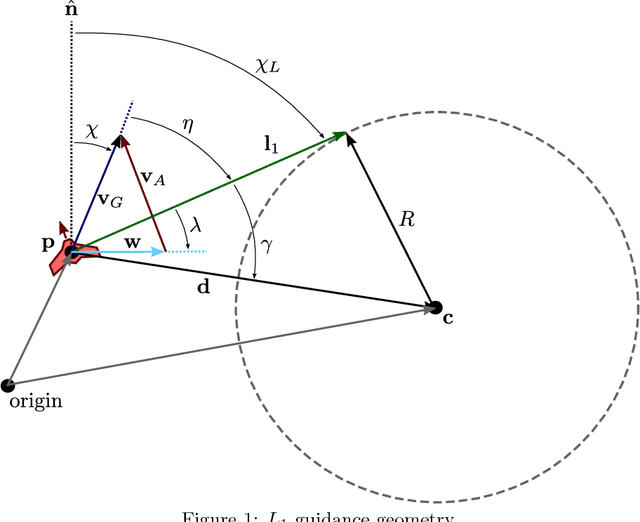
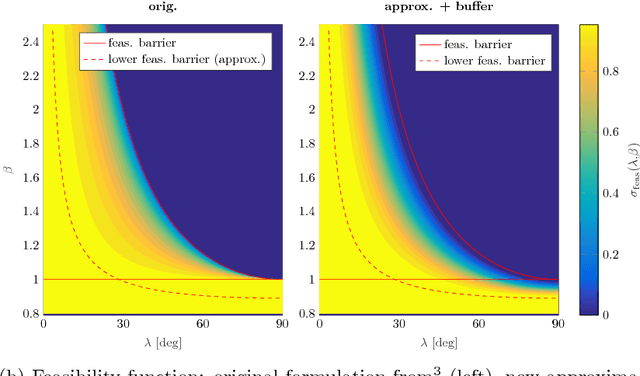
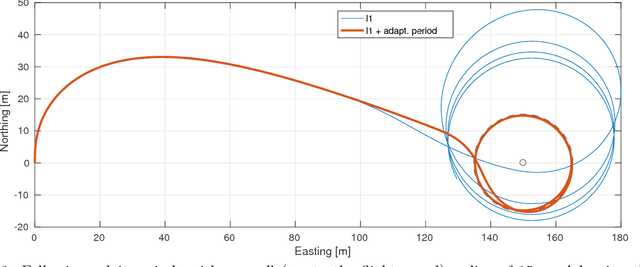
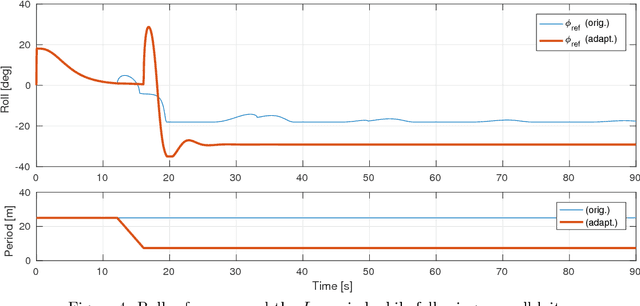
L1 guidance logic is one of the most widely used path following controllers for small fixed-wing unmanned aerial vehicles (UAVs), primarily due to its simplicity (low-cost implementation on embedded on-board processors, e.g. micro-controllers) and ability to track both circles and lines, which make up the vast majority of a typical fixed-wing vehicle's flight plan. The logic was later extended for speed independent dynamic similarity with an adaptive L1 distance, a formulation currently used on common open-source autopilot platforms. Two primary drawbacks remain, specific to small, slow flying fixed-wing UAVs; namely, 1) the combination of low operator defined gains and high ground speeds may violate the bounds of the algorithms convergence region for the case of loiter circles with small radii and 2) L1 logic breaks down when wind speeds exceed the vehicle's airspeed, another common predicament for small, slow-flying UAVs. This brief presents simple extensions to this extensively field tested algorithm, allowing legacy operators to keep existing controller tunings while taking advantage of the enhanced performance and safety features developed within.