 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Prompting Meets Feature Reconstruction-Based Anomaly Detection with Dual-Teacher Supervision
Jun 08, 2026Recent Anomaly Detection methods achieve perfect detection and segmentation scores on well-established datasets, such as MVTec. However, many of these methods face challenges when foundational assumptions - such as consistent object scale, viewpoint, background, illumination, and centered placement - are violated. Those variations that occur render anomaly detection methods unusable in many real-world scenarios. To address these limitations, we introduce three key contributions: (1) a visual prompting pipeline that isolates objects using foreground-background masking; (2) a mechanism for unfreezing the teacher in student-teacher models to improve domain adaptability; and (3) a data augmentation strategy leveraging diffusion-generated synthetic images to enhance anomaly detection performance. We achieve a 3.5 percentage point improvement over the previous state-of-the-art on the challenging AeBAD dataset by using the Masked Multiscale Reconstruction (MMR) model as our backbone.
Cracks in the Foundation: A Civil Infrastructure Dataset to Challenge Vision Foundation Models
May 19, 2026Automated structural health monitoring is essential to prevent catastrophic infrastructure failures. Precise, pixel-level defect segmentation is needed to accurately assess structural integrity, but progress in defect segmentation for civil infrastructures has been held back by an extreme scarcity of data, which requires costly expert annotation. The need for data is accentuated by algorithmic hurdles intrinsic to the problem, including center-bias and the need to rely more on shape when inspecting nearly textureless building materials. To remove the bottleneck, we introduce Cracks in the Foundation (CiF), the largest and most detailed civil infrastructure (instance) segmentation dataset to date, comprising $\approx$150,000 high-resolution images meticulously curated over five years in collaboration with civil engineering experts. With the help of this unprecedented data source, we expose a blind spot of current visual AI: despite the advent of promptable Foundation Models (FMs) and Vision Language Models (VLMs), and despite the impressive abilities of today's specialised segmentation models, it turns out that dense image understanding in the built environment is nowhere near solved. Our evaluations indicate that even the most recent zero-shot FMs face significant challenges when deployed on real-world infrastructure and even the performance of specialised models with domain-specific supervision plateaus at $\approx$25% mAP. CiF establishes inspection of civil infrastructure, an elementary and seemingly easy perceptual task, as an open challenge that reveals fundamental weaknesses of present-day models trained predominantly on internet images, literally and figuratively highlighting cracks in the current foundation model paradigm.
Faster by Design: Interactive Aerodynamics via Neural Surrogates Trained on Expert-Validated CFD
Apr 20, 2026Computational Fluid Dynamics (CFD) is central to race-car aerodynamic development, yet its cost -- tens of thousands of core-hours per high-fidelity evaluation -- severely limits the design space exploration feasible within realistic budgets. AI-based surrogate models promise to alleviate this bottleneck, but progress has been constrained by the limited complexity of public datasets, which are dominated by smoothed passenger-car shapes that fail to exercise surrogates on the thin, complex, highly loaded components governing motorsport performance. This work presents three primary contributions. First, we introduce a high-fidelity RANS dataset built on a parametric LMP2-class CAD model and spanning six operating conditions (map points) covering straight-line and cornering regimes, generated and validated by aerodynamics experts at Dallara to preserve features relevant to industrial motorsport. Second, we present the Gauge-Invariant Spectral Transformer (GIST), a graph-based neural operator whose spectral embeddings encode mesh connectivity to enhance predictions on tightly packed, complex geometries. GIST guarantees discretization invariance and scales linearly with mesh size, achieving state-of-the-art accuracy on both public benchmarks and the proposed race-car dataset. Third, we demonstrate that GIST achieves a level of predictive accuracy suitable for early-stage aerodynamic design, providing a first validation of the concept of interactive design-space exploration -- where engineers query a surrogate in place of the CFD solver -- within industrial motorsport workflows.
GIST: Gauge-Invariant Spectral Transformers for Scalable Graph Neural Operators
Mar 17, 2026Adapting transformer positional encoding to meshes and graph-structured data presents significant computational challenges: exact spectral methods require cubic-complexity eigendecomposition and can inadvertently break gauge invariance through numerical solver artifacts, while efficient approximate methods sacrifice gauge symmetry by design. Both failure modes cause catastrophic generalization in inductive learning, where models trained with one set of numerical choices fail when encountering different spectral decompositions of similar graphs or discretizations of the same mesh. We propose GIST (Gauge-Invariant Spectral Transformers), a new graph transformer architecture that resolves this challenge by achieving end-to-end $\mathcal{O}(N)$ complexity through random projections while algorithmically preserving gauge invariance via inner-product-based attention on the projected embeddings. We prove GIST achieves discretization-invariant learning with bounded mismatch error, enabling parameter transfer across arbitrary mesh resolutions for neural operator applications. Empirically, GIST matches state-of-the-art on standard graph benchmarks (e.g., achieving 99.50% micro-F1 on PPI) while uniquely scaling to mesh-based Neural Operator benchmarks with up to 750K nodes, achieving state-of-the-art aerodynamic prediction on the challenging DrivAerNet and DrivAerNet++ datasets.
SPARC: Separating Perception And Reasoning Circuits for Test-time Scaling of VLMs
Feb 06, 2026Despite recent successes, test-time scaling - i.e., dynamically expanding the token budget during inference as needed - remains brittle for vision-language models (VLMs): unstructured chains-of-thought about images entangle perception and reasoning, leading to long, disorganized contexts where small perceptual mistakes may cascade into completely wrong answers. Moreover, expensive reinforcement learning with hand-crafted rewards is required to achieve good performance. Here, we introduce SPARC (Separating Perception And Reasoning Circuits), a modular framework that explicitly decouples visual perception from reasoning. Inspired by sequential sensory-to-cognitive processing in the brain, SPARC implements a two-stage pipeline where the model first performs explicit visual search to localize question-relevant regions, then conditions its reasoning on those regions to produce the final answer. This separation enables independent test-time scaling with asymmetric compute allocation (e.g., prioritizing perceptual processing under distribution shift), supports selective optimization (e.g., improving the perceptual stage alone when it is the bottleneck for end-to-end performance), and accommodates compressed contexts by running global search at lower image resolutions and allocating high-resolution processing only to selected regions, thereby reducing total visual tokens count and compute. Across challenging visual reasoning benchmarks, SPARC outperforms monolithic baselines and strong visual-grounding approaches. For instance, SPARC improves the accuracy of Qwen3VL-4B on the $V^*$ VQA benchmark by 6.7 percentage points, and it surpasses "thinking with images" by 4.6 points on a challenging OOD task despite requiring a 200$\times$ lower token budget.
VP Lab: a PEFT-Enabled Visual Prompting Laboratory for Semantic Segmentation
May 21, 2025Large-scale pretrained vision backbones have transformed computer vision by providing powerful feature extractors that enable various downstream tasks, including training-free approaches like visual prompting for semantic segmentation. Despite their success in generic scenarios, these models often fall short when applied to specialized technical domains where the visual features differ significantly from their training distribution. To bridge this gap, we introduce VP Lab, a comprehensive iterative framework that enhances visual prompting for robust segmentation model development. At the core of VP Lab lies E-PEFT, a novel ensemble of parameter-efficient fine-tuning techniques specifically designed to adapt our visual prompting pipeline to specific domains in a manner that is both parameter- and data-efficient. Our approach not only surpasses the state-of-the-art in parameter-efficient fine-tuning for the Segment Anything Model (SAM), but also facilitates an interactive, near-real-time loop, allowing users to observe progressively improving results as they experiment within the framework. By integrating E-PEFT with visual prompting, we demonstrate a remarkable 50\% increase in semantic segmentation mIoU performance across various technical datasets using only 5 validated images, establishing a new paradigm for fast, efficient, and interactive model deployment in new, challenging domains. This work comes in the form of a demonstration.
Show or Tell? Effectively prompting Vision-Language Models for semantic segmentation
Mar 25, 2025Large Vision-Language Models (VLMs) are increasingly being regarded as foundation models that can be instructed to solve diverse tasks by prompting, without task-specific training. We examine the seemingly obvious question: how to effectively prompt VLMs for semantic segmentation. To that end, we systematically evaluate the segmentation performance of several recent models guided by either text or visual prompts on the out-of-distribution MESS dataset collection. We introduce a scalable prompting scheme, few-shot prompted semantic segmentation, inspired by open-vocabulary segmentation and few-shot learning. It turns out that VLMs lag far behind specialist models trained for a specific segmentation task, by about 30% on average on the Intersection-over-Union metric. Moreover, we find that text prompts and visual prompts are complementary: each one of the two modes fails on many examples that the other one can solve. Our analysis suggests that being able to anticipate the most effective prompt modality can lead to a 11% improvement in performance. Motivated by our findings, we propose PromptMatcher, a remarkably simple training-free baseline that combines both text and visual prompts, achieving state-of-the-art results outperforming the best text-prompted VLM by 2.5%, and the top visual-prompted VLM by 3.5% on few-shot prompted semantic segmentation.
Active Learning for Imbalanced Civil Infrastructure Data
Oct 19, 2022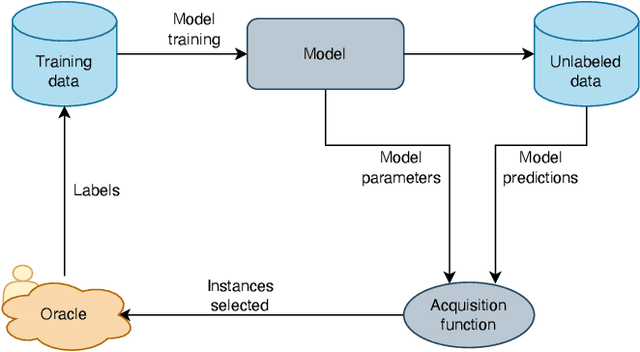
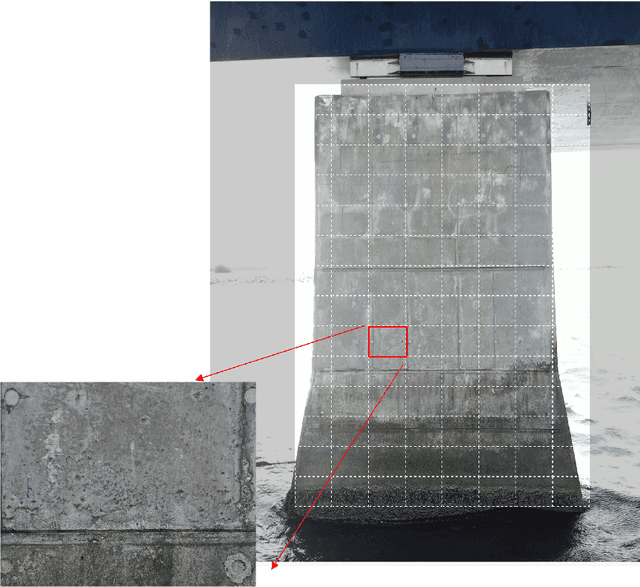
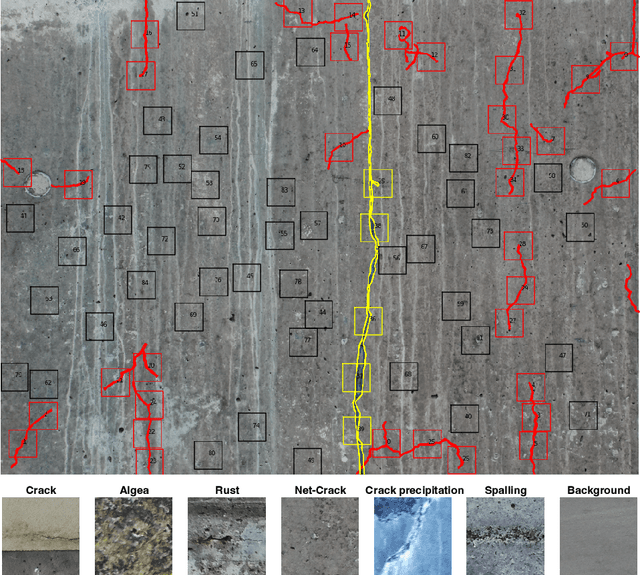
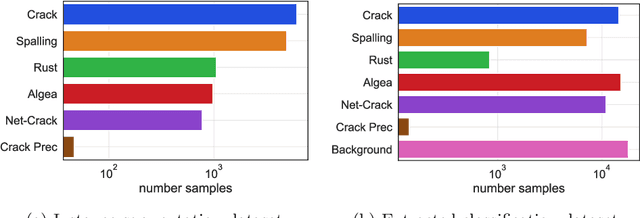
Aging civil infrastructures are closely monitored by engineers for damage and critical defects. As the manual inspection of such large structures is costly and time-consuming, we are working towards fully automating the visual inspections to support the prioritization of maintenance activities. To that end we combine recent advances in drone technology and deep learning. Unfortunately, annotation costs are incredibly high as our proprietary civil engineering dataset must be annotated by highly trained engineers. Active learning is, therefore, a valuable tool to optimize the trade-off between model performance and annotation costs. Our use-case differs from the classical active learning setting as our dataset suffers from heavy class imbalance and consists of a much larger already labeled data pool than other active learning research. We present a novel method capable of operating in this challenging setting by replacing the traditional active learning acquisition function with an auxiliary binary discriminator. We experimentally show that our novel method outperforms the best-performing traditional active learning method (BALD) by 5% and 38% accuracy on CIFAR-10 and our proprietary dataset respectively.