 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic LQR Tuning Based on Gaussian Process Global Optimization
May 06, 2016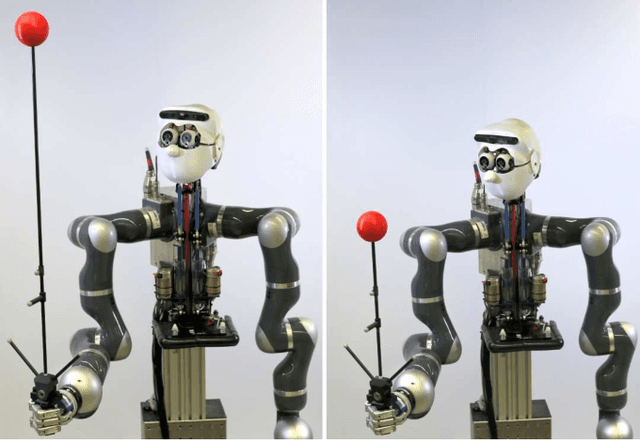
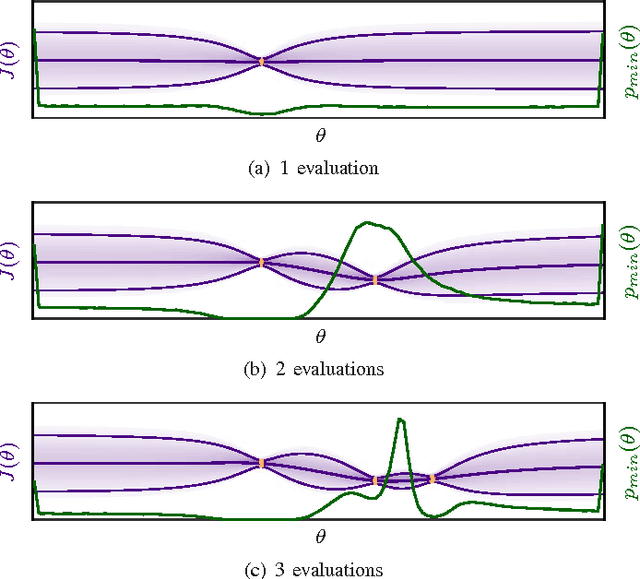
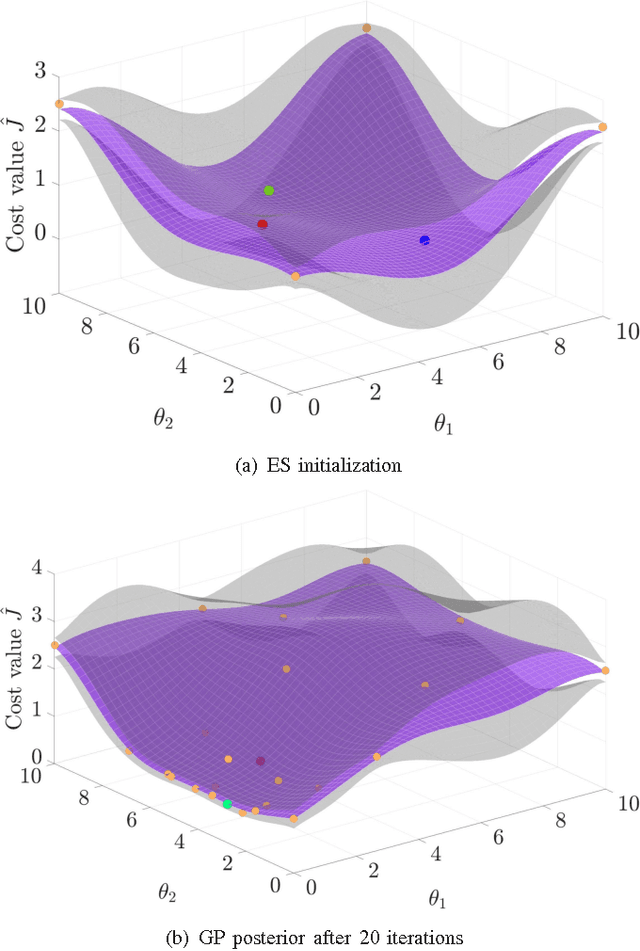
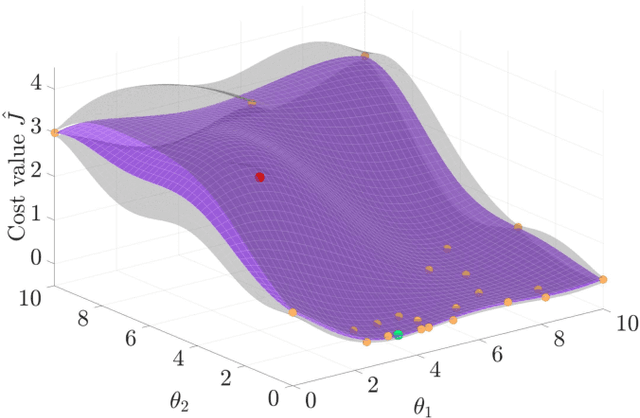
This paper proposes an automatic controller tuning framework based on linear optimal control combined with Bayesian optimization. With this framework, an initial set of controller gains is automatically improved according to a pre-defined performance objective evaluated from experimental data. The underlying Bayesian optimization algorithm is Entropy Search, which represents the latent objective as a Gaussian process and constructs an explicit belief over the location of the objective minimum. This is used to maximize the information gain from each experimental evaluation. Thus, this framework shall yield improved controllers with fewer evaluations compared to alternative approaches. A seven-degree-of-freedom robot arm balancing an inverted pole is used as the experimental demonstrator. Results of a two- and four-dimensional tuning problems highlight the method's potential for automatic controller tuning on robotic platforms.
Depth-Based Object Tracking Using a Robust Gaussian Filter
Feb 19, 2016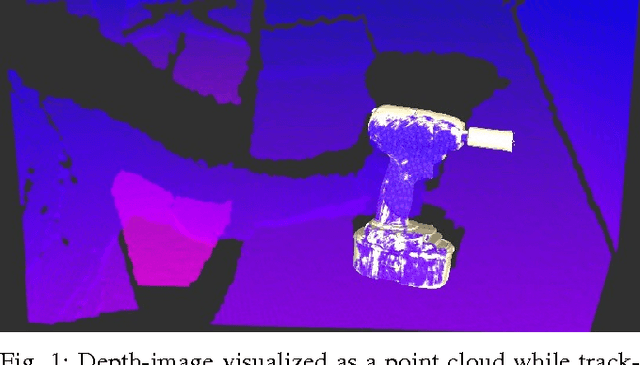
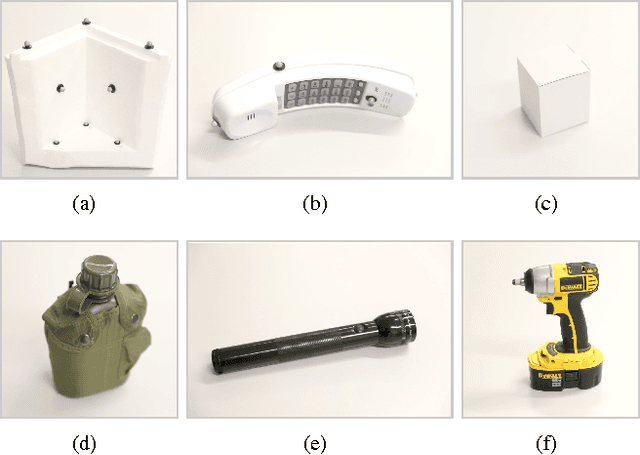
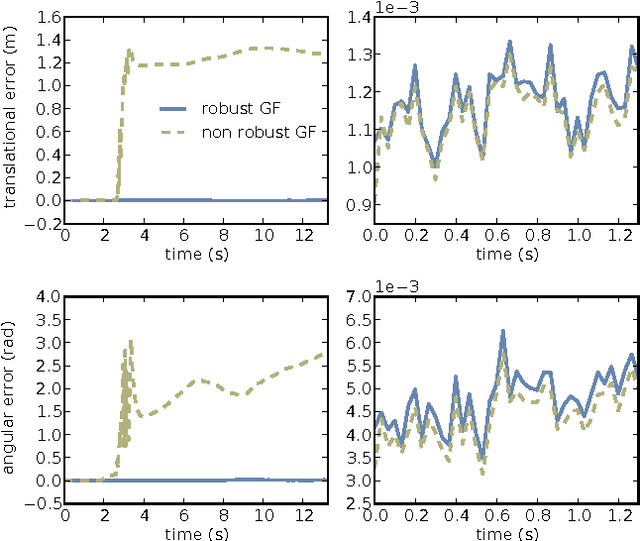
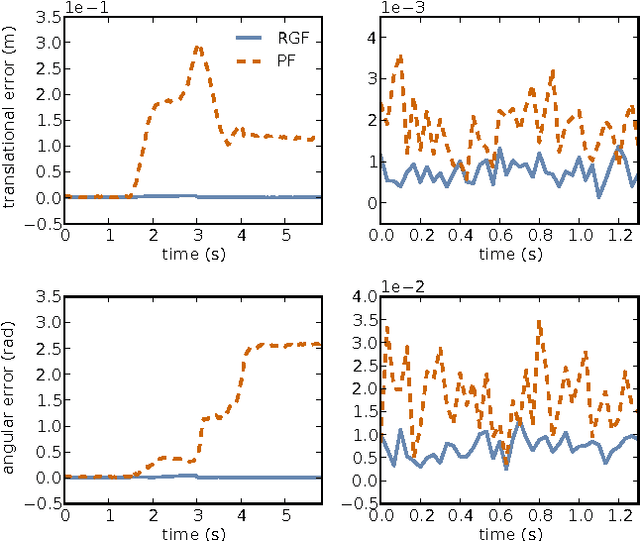
We consider the problem of model-based 3D-tracking of objects given dense depth images as input. Two difficulties preclude the application of a standard Gaussian filter to this problem. First of all, depth sensors are characterized by fat-tailed measurement noise. To address this issue, we show how a recently published robustification method for Gaussian filters can be applied to the problem at hand. Thereby, we avoid using heuristic outlier detection methods that simply reject measurements if they do not match the model. Secondly, the computational cost of the standard Gaussian filter is prohibitive due to the high-dimensional measurement, i.e. the depth image. To address this problem, we propose an approximation to reduce the computational complexity of the filter. In quantitative experiments on real data we show how our method clearly outperforms the standard Gaussian filter. Furthermore, we compare its performance to a particle-filter-based tracking method, and observe comparable computational efficiency and improved accuracy and smoothness of the estimates.
Inertial Sensor-Based Humanoid Joint State Estimation
Feb 16, 2016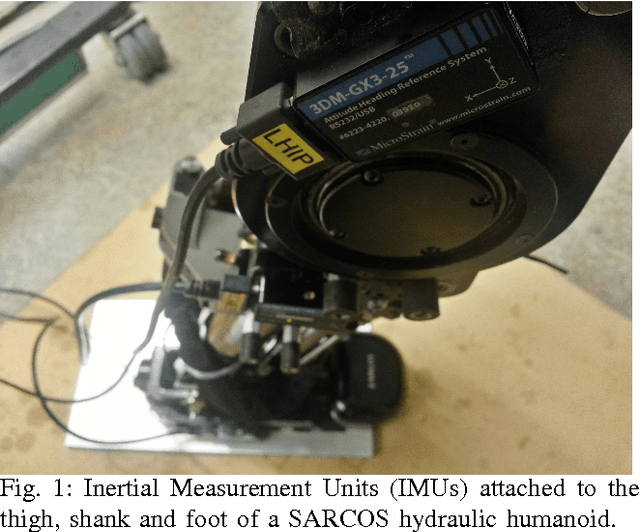
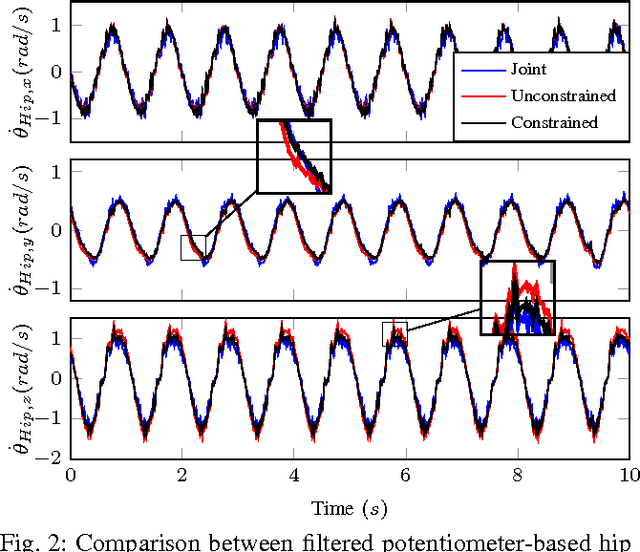
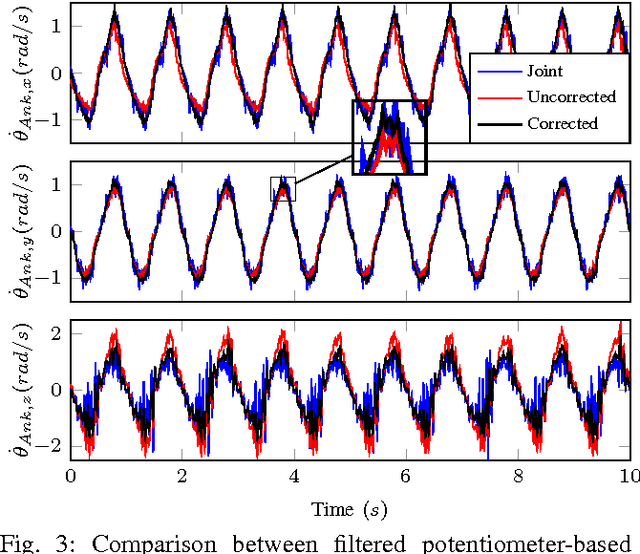
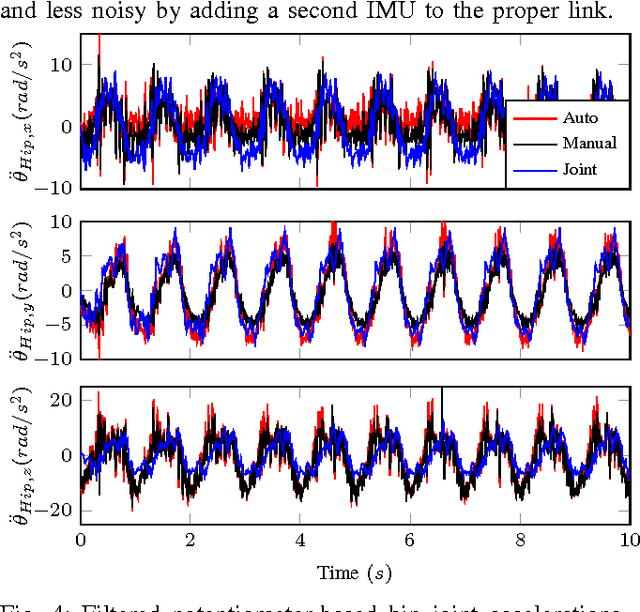
This work presents methods for the determination of a humanoid robot's joint velocities and accelerations directly from link-mounted Inertial Measurement Units (IMUs) each containing a three-axis gyroscope and a three-axis accelerometer. No information about the global pose of the floating base or its links is required and precise knowledge of the link IMU poses is not necessary due to presented calibration routines. Additionally, a filter is introduced to fuse gyroscope angular velocities with joint position measurements and compensate the computed joint velocities for time-varying gyroscope biases. The resulting joint velocities are subject to less noise and delay than filtered velocities computed from numerical differentiation of joint potentiometer signals, leading to superior performance in joint feedback control as demonstrated in experiments performed on a SARCOS hydraulic humanoid.
Momentum Control with Hierarchical Inverse Dynamics on a Torque-Controlled Humanoid
Aug 07, 2015
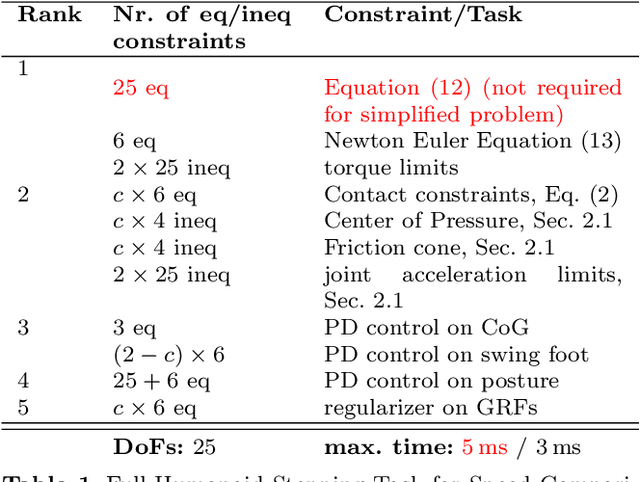
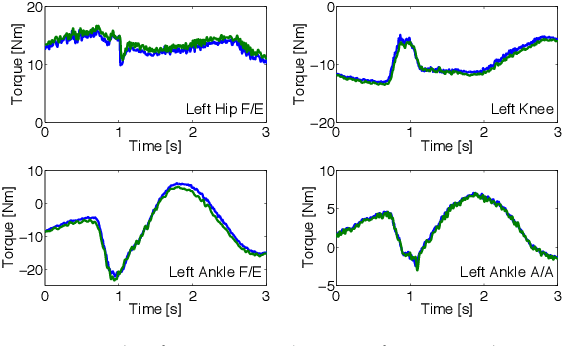
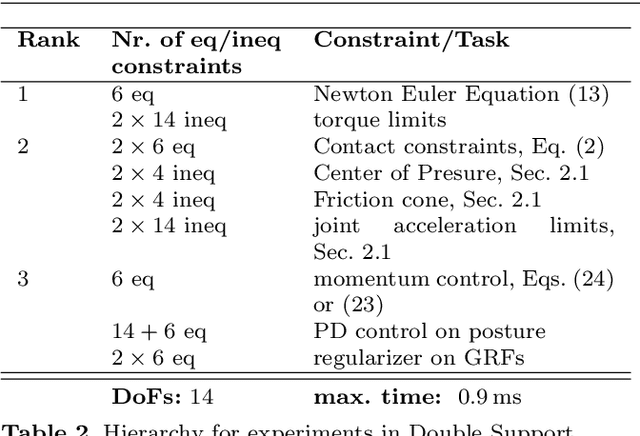
Hierarchical inverse dynamics based on cascades of quadratic programs have been proposed for the control of legged robots. They have important benefits but to the best of our knowledge have never been implemented on a torque controlled humanoid where model inaccuracies, sensor noise and real-time computation requirements can be problematic. Using a reformulation of existing algorithms, we propose a simplification of the problem that allows to achieve real-time control. Momentum-based control is integrated in the task hierarchy and a LQR design approach is used to compute the desired associated closed-loop behavior and improve performance. Extensive experiments on various balancing and tracking tasks show very robust performance in the face of unknown disturbances, even when the humanoid is standing on one foot. Our results demonstrate that hierarchical inverse dynamics together with momentum control can be efficiently used for feedback control under real robot conditions.
Humanoid Momentum Estimation Using Sensed Contact Wrenches
Jul 15, 2015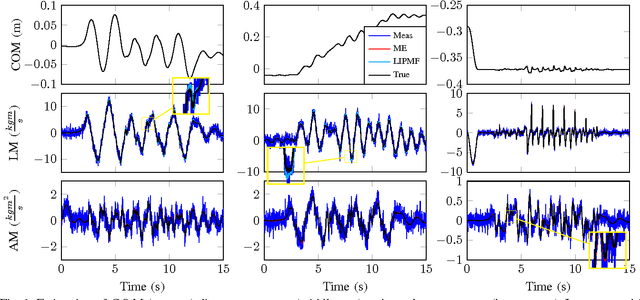
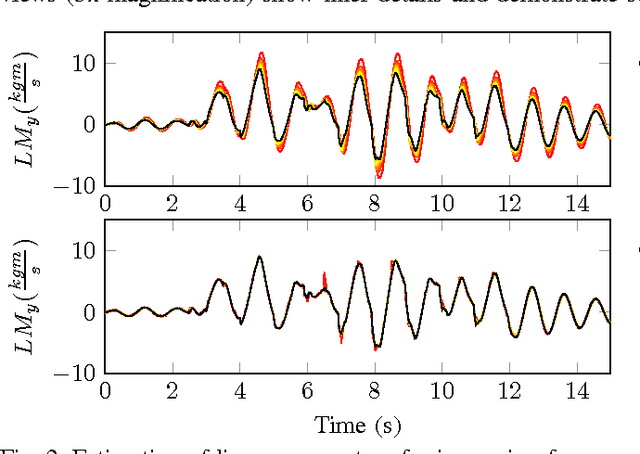
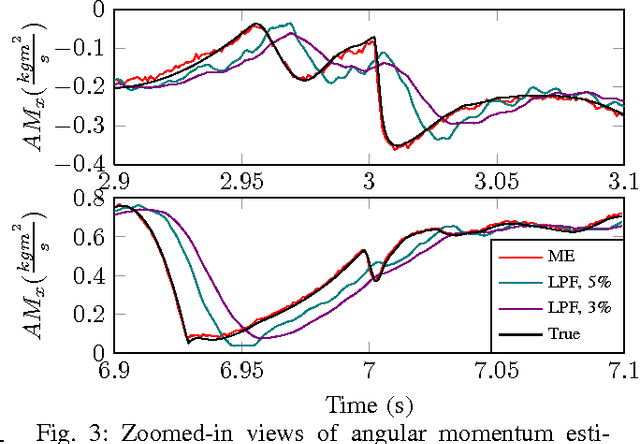
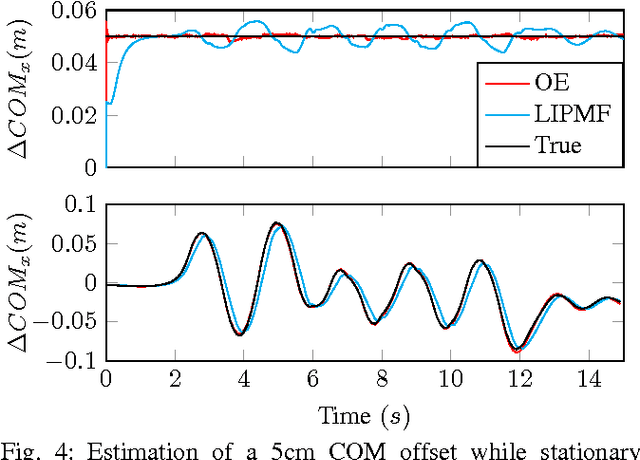
This work presents approaches for the estimation of quantities important for the control of the momentum of a humanoid robot. In contrast to previous approaches which use simplified models such as the Linear Inverted Pendulum Model, we present estimators based on the momentum dynamics of the robot. By using this simple yet dynamically-consistent model, we avoid the issues of using simplified models for estimation. We develop an estimator for the center of mass and full momentum which can be reformulated to estimate center of mass offsets as well as external wrenches applied to the robot. The observability of these estimators is investigated and their performance is evaluated in comparison to previous approaches.
Trajectory generation for multi-contact momentum-control
Jul 15, 2015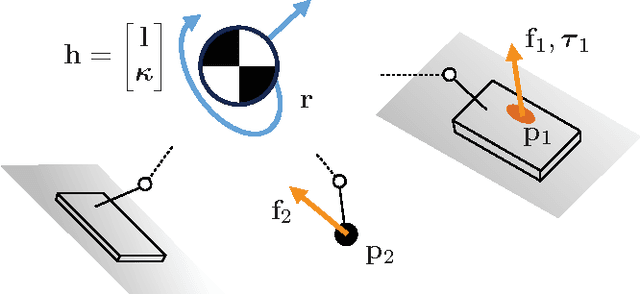
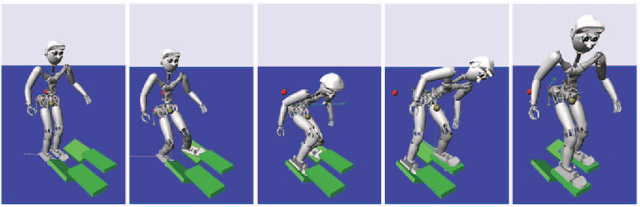
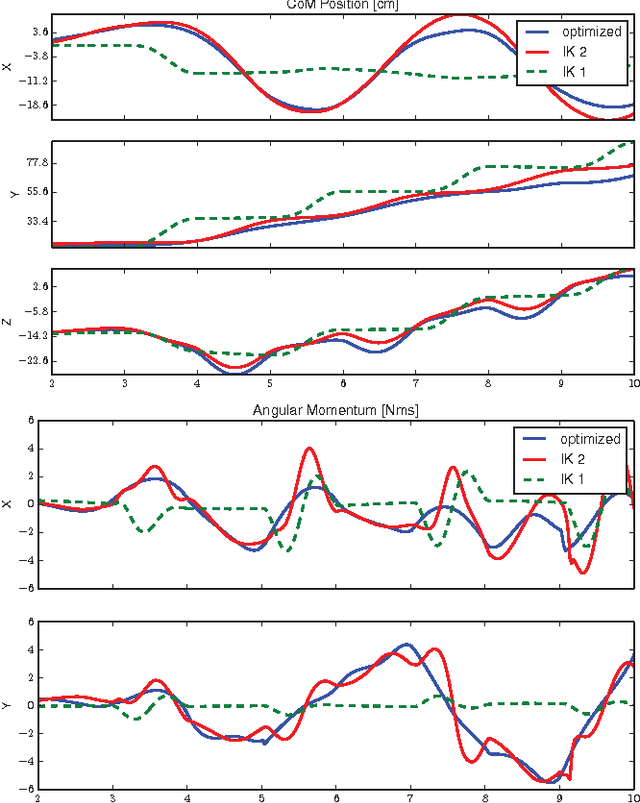
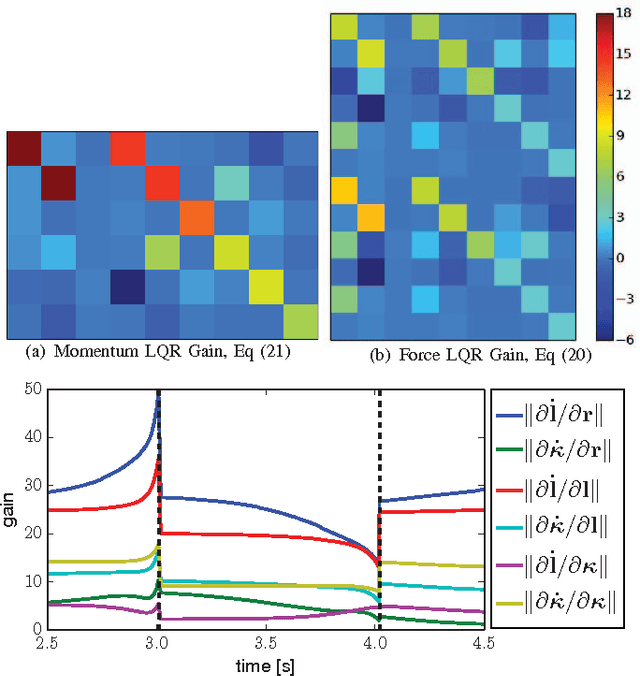
Simplified models of the dynamics such as the linear inverted pendulum model (LIPM) have proven to perform well for biped walking on flat ground. However, for more complex tasks the assumptions of these models can become limiting. For example, the LIPM does not allow for the control of contact forces independently, is limited to co-planar contacts and assumes that the angular momentum is zero. In this paper, we propose to use the full momentum equations of a humanoid robot in a trajectory optimization framework to plan its center of mass, linear and angular momentum trajectories. The model also allows for planning desired contact forces for each end-effector in arbitrary contact locations. We extend our previous results on LQR design for momentum control by computing the (linearized) optimal momentum feedback law in a receding horizon fashion. The resulting desired momentum and the associated feedback law are then used in a hierarchical whole body control approach. Simulation experiments show that the approach is computationally fast and is able to generate plans for locomotion on complex terrains while demonstrating good tracking performance for the full humanoid control.
A New Perspective and Extension of the Gaussian Filter
Jun 05, 2015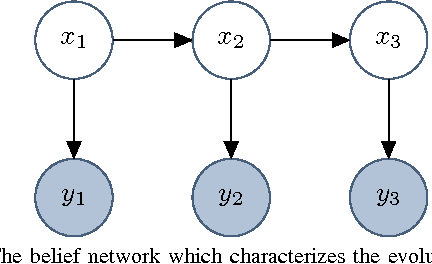
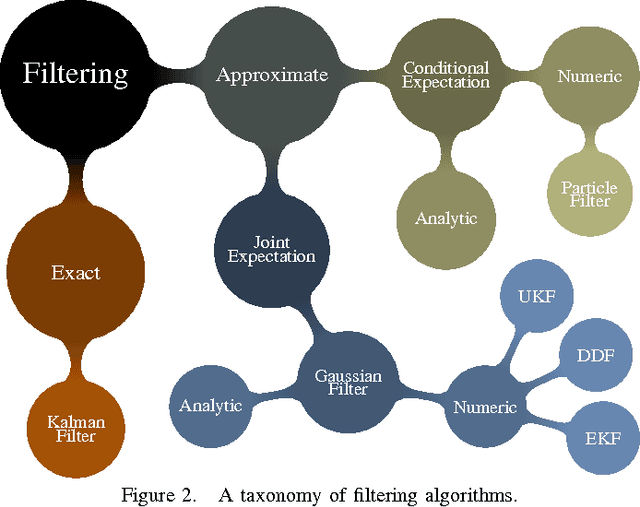
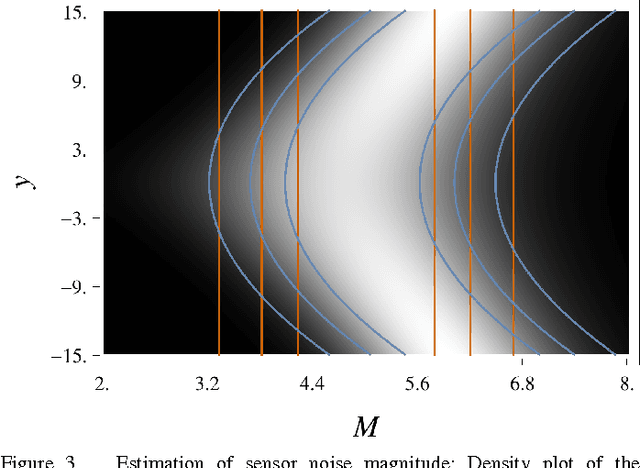
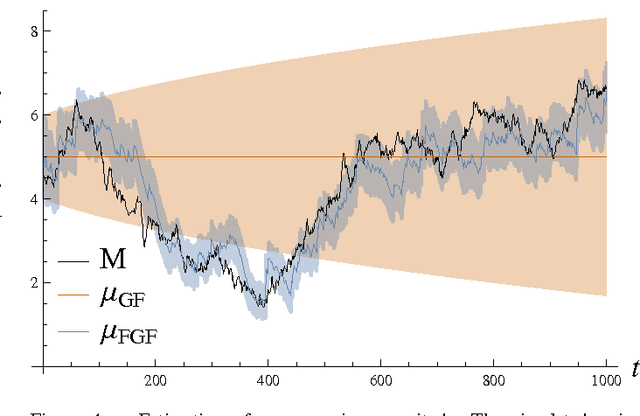
The Gaussian Filter (GF) is one of the most widely used filtering algorithms; instances are the Extended Kalman Filter, the Unscented Kalman Filter and the Divided Difference Filter. GFs represent the belief of the current state by a Gaussian with the mean being an affine function of the measurement. We show that this representation can be too restrictive to accurately capture the dependences in systems with nonlinear observation models, and we investigate how the GF can be generalized to alleviate this problem. To this end, we view the GF from a variational-inference perspective. We analyse how restrictions on the form of the belief can be relaxed while maintaining simplicity and efficiency. This analysis provides a basis for generalizations of the GF. We propose one such generalization which coincides with a GF using a virtual measurement, obtained by applying a nonlinear function to the actual measurement. Numerical experiments show that the proposed Feature Gaussian Filter (FGF) can have a substantial performance advantage over the standard GF for systems with nonlinear observation models.
Policy Learning with Hypothesis based Local Action Selection
May 08, 2015

For robots to be able to manipulate in unknown and unstructured environments the robot should be capable of operating under partial observability of the environment. Object occlusions and unmodeled environments are some of the factors that result in partial observability. A common scenario where this is encountered is manipulation in clutter. In the case that the robot needs to locate an object of interest and manipulate it, it needs to perform a series of decluttering actions to accurately detect the object of interest. To perform such a series of actions, the robot also needs to account for the dynamics of objects in the environment and how they react to contact. This is a non trivial problem since one needs to reason not only about robot-object interactions but also object-object interactions in the presence of contact. In the example scenario of manipulation in clutter, the state vector would have to account for the pose of the object of interest and the structure of the surrounding environment. The process model would have to account for all the aforementioned robot-object, object-object interactions. The complexity of the process model grows exponentially as the number of objects in the scene increases. This is commonly the case in unstructured environments. Hence it is not reasonable to attempt to model all object-object and robot-object interactions explicitly. Under this setting we propose a hypothesis based action selection algorithm where we construct a hypothesis set of the possible poses of an object of interest given the current evidence in the scene and select actions based on our current set of hypothesis. This hypothesis set tends to represent the belief about the structure of the environment and the number of poses the object of interest can take. The agent's only stopping criterion is when the uncertainty regarding the pose of the object is fully resolved.
The Coordinate Particle Filter - A novel Particle Filter for High Dimensional Systems
May 01, 2015
Parametric filters, such as the Extended Kalman Filter and the Unscented Kalman Filter, typically scale well with the dimensionality of the problem, but they are known to fail if the posterior state distribution cannot be closely approximated by a density of the assumed parametric form. For nonparametric filters, such as the Particle Filter, the converse holds. Such methods are able to approximate any posterior, but the computational requirements scale exponentially with the number of dimensions of the state space. In this paper, we present the Coordinate Particle Filter which alleviates this problem. We propose to compute the particle weights recursively, dimension by dimension. This allows us to explore one dimension at a time, and resample after each dimension if necessary. Experimental results on simulated as well as real data confirm that the proposed method has a substantial performance advantage over the Particle Filter in high-dimensional systems where not all dimensions are highly correlated. We demonstrate the benefits of the proposed method for the problem of multi-object and robotic manipulator tracking.
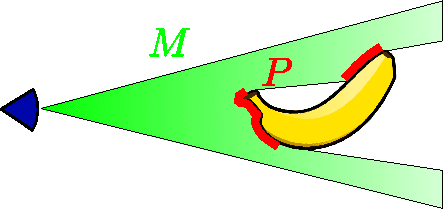
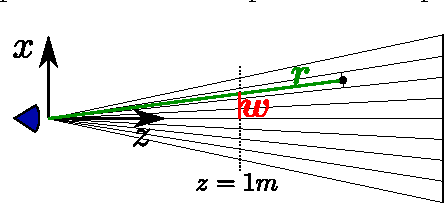
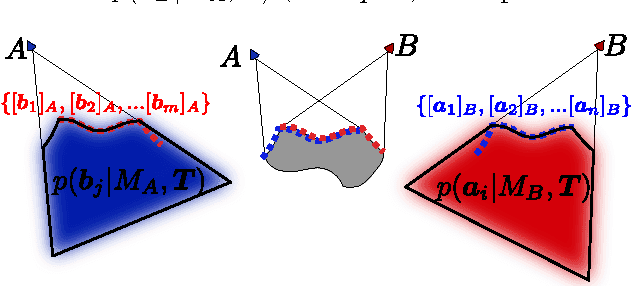
Probabilistic Depth Image Registration incorporating Nonvisual Information
May 01, 2015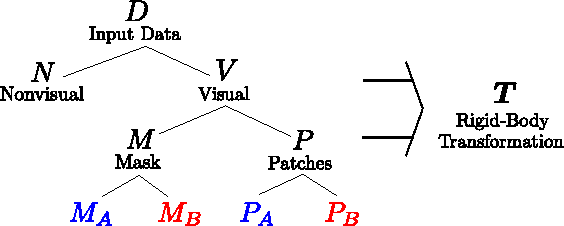
In this paper, we derive a probabilistic registration algorithm for object modeling and tracking. In many robotics applications, such as manipulation tasks, nonvisual information about the movement of the object is available, which we will combine with the visual information. Furthermore we do not only consider observations of the object, but we also take space into account which has been observed to not be part of the object. Furthermore we are computing a posterior distribution over the relative alignment and not a point estimate as typically done in for example Iterative Closest Point (ICP). To our knowledge no existing algorithm meets these three conditions and we thus derive a novel registration algorithm in a Bayesian framework. Experimental results suggest that the proposed methods perform favorably in comparison to PCL implementations of feature mapping and ICP, especially if nonvisual information is available.