 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing with Living Neurons: Chaos-Controlled Reservoir Computing with Knowledge Transplant
Apr 02, 2026We introduce chaos-controlled Reservoir Computing (cc-RC) for living neural cultures: dynamically rich substrates of unique potential for adaptive computation. To account for intrinsic biological variability, cc-RC combines: (i) pre-training identification of each culture's dynamical signature and phase-portrait attractor; (ii) low-power optical chaos control to stabilize spontaneous and stimulus-evoked activity; (iii) readout training within this controlled regime. Across hundreds of neural samples, cc-RC enables robust learning and pattern classification, improving both accuracy and model longevity by approximately 300% over standard RC. We further propose Knowledge Transplant (KT), for which the reservoir map learned by an expert culture is transplanted to an attractor-equivalent student culture, reducing training time to minutes while improving performance. By enabling cross-substrate, reusable learned models, KT paves the way for knowledge accumulation and sharing across neural populations, transcending biological lifespan limits.
Joint Surrogate Learning of Objectives, Constraints, and Sensitivities for Efficient Multi-objective Optimization of Neural Dynamical Systems
Mar 22, 2026Biophysical neural system simulations are among the most computationally demanding scientific applications, and their optimization requires navigating high-dimensional parameter spaces under numerous constraints that impose a binary feasible/infeasible partition with no gradient signal to guide the search. Here, we introduce DMOSOPT, a scalable optimization framework that leverages a unified, jointly learned surrogate model to capture the interplay between objectives, constraints, and parameter sensitivities. By learning a smooth approximation of both the objective landscape and the feasibility boundary, the joint surrogate provides a unified gradient that simultaneously steers the search toward improved objective values and greater constraint satisfaction, while its partial derivatives yield per-parameter sensitivity estimates that enable more targeted exploration. We validate the framework from single-cell dynamics to population-level network activity, spanning incremental stages of a neural circuit modeling workflow, and demonstrate efficient, effective optimization of highly constrained problems at supercomputing scale with substantially fewer problem evaluations. While motivated by and demonstrated in the context of computational neuroscience, the framework is general and applicable to constrained multi-objective optimization problems across scientific and engineering domains.
S2Act: Simple Spiking Actor
Mar 16, 2026Spiking neural networks (SNNs) and biologically-inspired learning mechanisms are attractive in mobile robotics, where the size and performance of onboard neural network policies are constrained by power and computational budgets. Existing SNN approaches, such as population coding, reward modulation, and hybrid artificial neural network (ANN)-SNN architectures, have shown promising results; however, they face challenges in complex, highly stochastic environments due to SNN sensitivity to hyperparameters and inconsistent gradient signals. To address these challenges, we propose simple spiking actor (S2Act), a computationally lightweight framework that deploys an RL policy using an SNN in three steps: (1) architect an actor-critic model based on an approximated network of rate-based spiking neurons, (2) train the network with gradients using compatible activation functions, and (3) transfer the trained weights into physical parameters of rate-based leaky integrate-and-fire (LIF) neurons for inference and deployment. By globally shaping LIF neuron parameters such that their rate-based responses approximate ReLU activations, S2Act effectively mitigates the vanishing gradient problem, while pre-constraining LIF response curves reduces reliance on complex SNN-specific hyperparameter tuning. We demonstrate our method in two multi-agent stochastic environments (capture-the-flag and parking) that capture the complexity of multi-robot interactions, and deploy our trained policies on physical TurtleBot platforms using Intel's Loihi neuromorphic hardware. Our experimental results show that S2Act outperforms relevant baselines in task performance and real-time inference in nearly all considered scenarios, highlighting its potential for rapid prototyping and efficient real-world deployment of SNN-based RL policies.
Hierarchical control and learning of a foraging CyberOctopus
Feb 11, 2023Inspired by the unique neurophysiology of the octopus, we propose a hierarchical framework that simplifies the coordination of multiple soft arms by decomposing control into high-level decision making, low-level motor activation, and local reflexive behaviors via sensory feedback. When evaluated in the illustrative problem of a model octopus foraging for food, this hierarchical decomposition results in significant improvements relative to end-to-end methods. Performance is achieved through a mixed-modes approach, whereby qualitatively different tasks are addressed via complementary control schemes. Here, model-free reinforcement learning is employed for high-level decision-making, while model-based energy shaping takes care of arm-level motor execution. To render the pairing computationally tenable, a novel neural-network energy shaping (NN-ES) controller is developed, achieving accurate motions with time-to-solutions 200 times faster than previous attempts. Our hierarchical framework is then successfully deployed in increasingly challenging foraging scenarios, including an arena littered with obstacles in 3D space, demonstrating the viability of our approach.
A physics-informed, vision-based method to reconstruct all deformation modes in slender bodies
Sep 17, 2021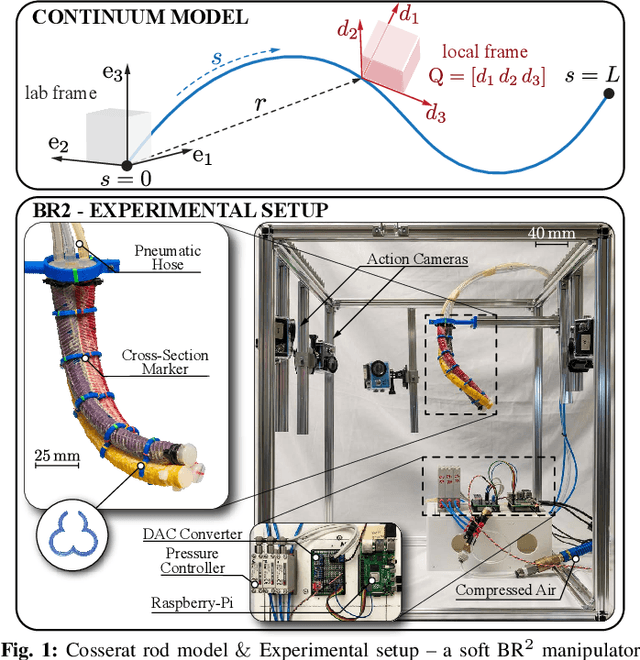
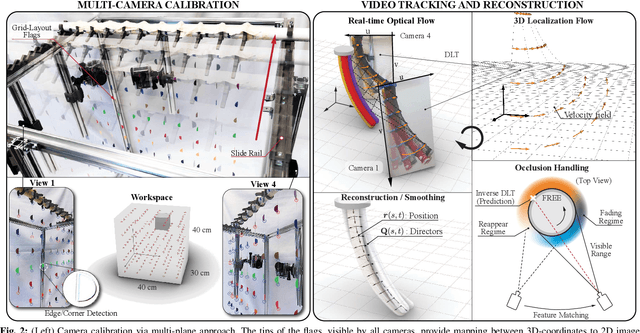
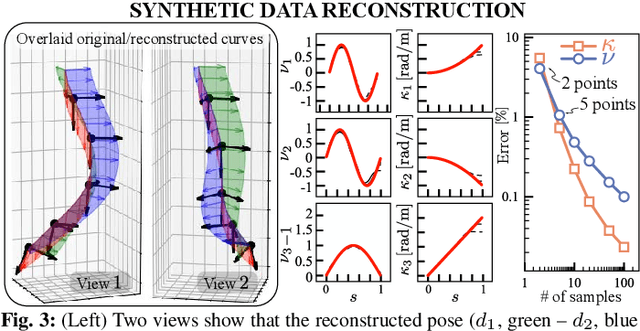
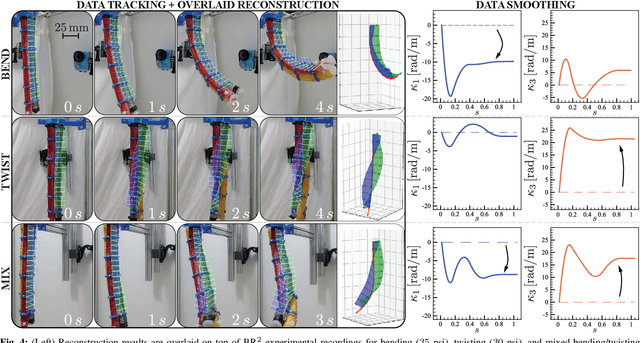
This paper is concerned with the problem of estimating (interpolating and smoothing) the shape (pose and the six modes of deformation) of a slender flexible body from multiple camera measurements. This problem is important in both biology, where slender, soft, and elastic structures are ubiquitously encountered across species, and in engineering, particularly in the area of soft robotics. The proposed mathematical formulation for shape estimation is physics-informed, based on the use of the special Cosserat rod theory whose equations encode slender body mechanics in the presence of bending, shearing, twisting and stretching. The approach is used to derive numerical algorithms which are experimentally demonstrated for fiber reinforced and cable-driven soft robot arms. These experimental demonstrations show that the methodology is accurate (<5 mm error, three times less than the arm diameter) and robust to noise and uncertainties.
Robust Translational Force Control of Multi-Rotor UAV for Precise Acceleration Tracking
Aug 14, 2019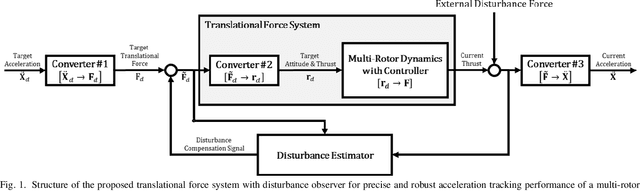
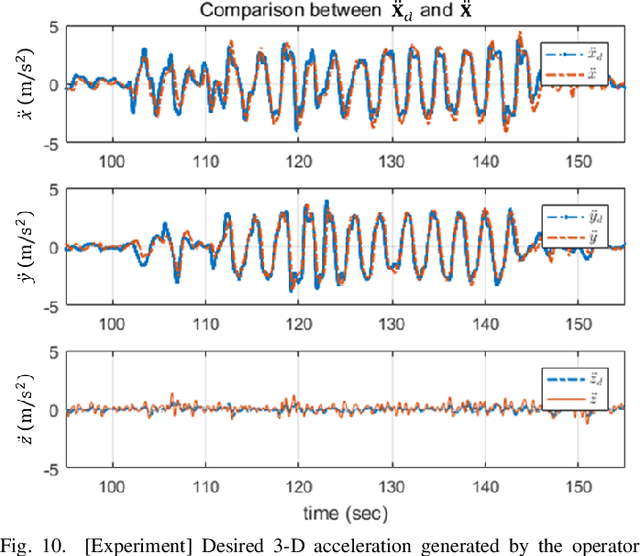
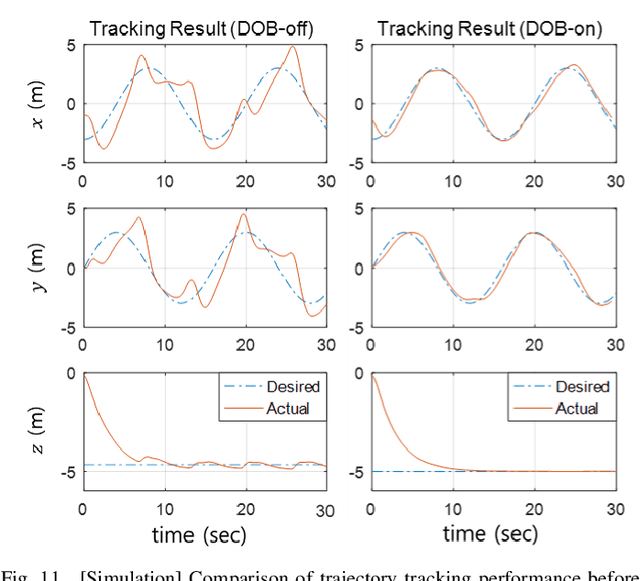
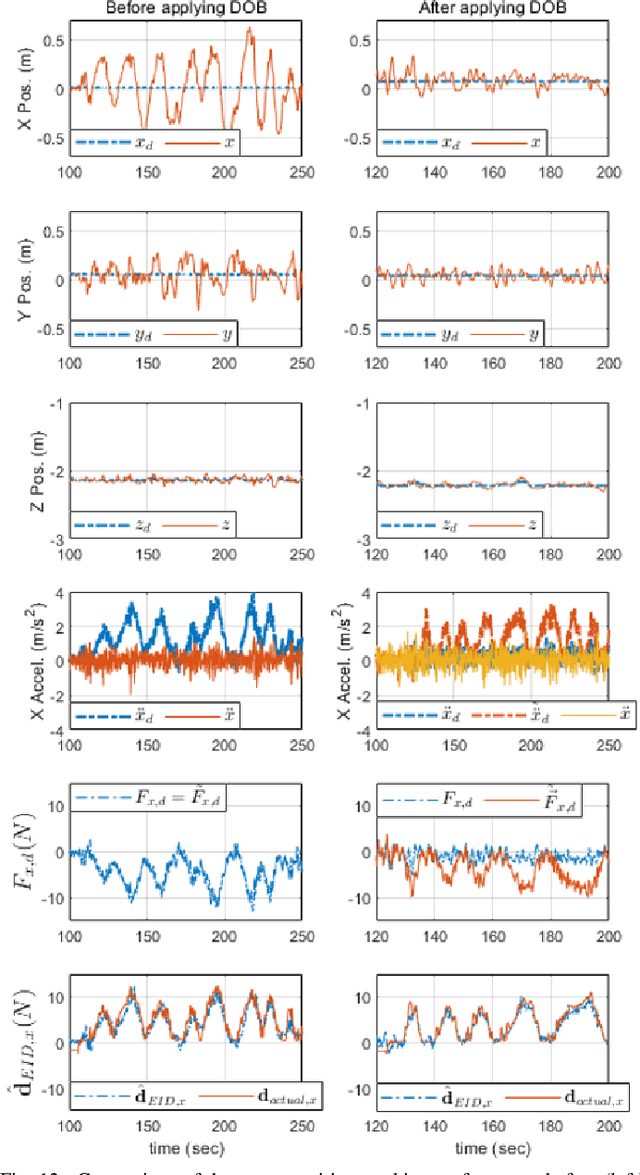
In this paper, we introduce a translational force control method with disturbance observer (DOB)-based force disturbance cancellation for precise three-dimensional acceleration control of a multi-rotor UAV. The acceleration control of the multi-rotor requires conversion of the desired acceleration signal to the desired roll, pitch, and total thrust. But because the attitude dynamics and the thrust dynamics are different, simple kinematic signal conversion without consideration of those difference can cause serious performance degradation in acceleration tracking. Unlike most existing translational force control techniques that are based on such simple inversion, our new method allows controlling the acceleration of the multi-rotor more precisely by considering the dynamics of the multi-rotor during the kinematic inversion. By combining the DOB with the translational force system that includes the improved conversion technique, we achieve robustness with respect to the external force disturbances that hinders the accurate acceleration control. mu-analysis is performed to ensure the robust stability of the overall closed-loop system, considering the combined effect of various possible model uncertainties. Both simulation and experiment are conducted to validate the proposed technique, which confirms the satisfactory performance to track the desired acceleration of the multi-rotor.