 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRLDX-1 Technical Report
May 05, 2026While Vision-Language-Action models (VLAs) have shown remarkable progress toward human-like generalist robotic policies through the versatile intelligence (i.e. broad scene understanding and language-conditioned generalization) inherited from pre-trained Vision-Language Models, they still struggle with complex real-world tasks requiring broader functional capabilities (e.g. motion awareness, memory-aware decision making, and physical sensing). To address this, we introduce RLDX-1, a general-purpose robotic policy for dexterous manipulation built on the Multi-Stream Action Transformer (MSAT), an architecture that unifies these capabilities by integrating heterogeneous modalities through modality-specific streams with cross-modal joint self-attention. RLDX-1 further combines this architecture with system-level design choices, including synthesizing training data for rare manipulation scenarios, learning procedures specialized for human-like manipulation, and inference optimizations for real-time deployment. Through empirical evaluation, we show that RLDX-1 consistently outperforms recent frontier VLAs (e.g. $π_{0.5}$ and GR00T N1.6) across both simulation benchmarks and real-world tasks that require broad functional capabilities beyond general versatility. In particular, RLDX-1 shows superiority in ALLEX humanoid tasks by achieving success rates of 86.8% while $π_{0.5}$ and GR00T N1.6 achieve around 40%, highlighting the ability of RLDX-1 to control a high-DoF humanoid robot under diverse functional demands. Together, these results position RLDX-1 as a promising step toward reliable VLAs for complex, contact-rich, and dynamic real-world dexterous manipulation.
Correct Prediction, Wrong Steps? Consensus Reasoning Knowledge Graph for Robust Chain-of-Thought Synthesis
Apr 15, 2026LLM reasoning traces suffer from complex flaws -- *Step Internal Flaws* (logical errors, hallucinations, etc.) and *Step-wise Flaws* (overthinking, underthinking), which vary by sample. A natural approach would be to provide ground-truth labels to guide LLMs' reasoning. Contrary to intuition, we show that this yields no improvement in reasoning ability. We then propose CRAFT, a unified framework that mitigates both types of Step flaws, which builds a Reasoning Knowledge Graph (RKG) based on the consensus parts of multiple candidate traces, and synthesizes a high-quality trace through topological generation. Our approach improves label-prediction accuracy by 10+% on average, and consistently outperforms all baselines across both logical and mathematical reasoning benchmarks. Further, detailed benchmark evaluation proves that our method also improves the quality of LLMs' reasoning traces in multiple dimensions.
How Much LLM Does a Self-Revising Agent Actually Need?
Apr 09, 2026Recent LLM-based agents often place world modeling, planning, and reflection inside a single language model loop. This can produce capable behavior, but it makes a basic scientific question difficult to answer: which part of the agent's competence actually comes from the LLM, and which part comes from explicit structure around it? We study this question not by claiming a general answer, but by making it empirically tractable. We introduce a declared reflective runtime protocol that externalizes agent state, confidence signals, guarded actions, and hypothetical transitions into inspectable runtime structure. We instantiate this protocol in a declarative runtime and evaluate it on noisy Collaborative Battleship [4] using four progressively structured agents over 54 games (18 boards $\times$ 3 seeds). The resulting decomposition isolates four components: posterior belief tracking, explicit world-model planning, symbolic in-episode reflection, and sparse LLM-based revision. Across this decomposition, explicit world-model planning improves substantially over a greedy posterior-following baseline (+24.1pp win rate, +0.017 F1). Symbolic reflection operates as a real runtime mechanism -- with prediction tracking, confidence gating, and guarded revision actions -- even though its current revision presets are not yet net-positive in aggregate. Adding conditional LLM revision at about 4.3\% of turns yields only a small and non-monotonic change: average F1 rises slightly (+0.005) while win rate drops (31$\rightarrow$29 out of 54). These results suggest a methodological contribution rather than a leaderboard claim: externalizing reflection turns otherwise latent agent behavior into inspectable runtime structure, allowing the marginal role of LLM intervention to be studied directly.
Varco Arena: A Tournament Approach to Reference-Free Benchmarking Large Language Models
Nov 02, 2024



The rapid advancement of Large Language Models (LLMs) necessitates robust evaluation methodologies. Current benchmarking approaches often rely on comparing model outputs against predefined prompts and reference outputs. Relying on predefined reference outputs hinders flexible adaptation of benchmarks to the rapidly evolving capabilities of LLMs. This limitation necessitates periodic efforts to prepare new benchmarks. To keep pace with rapidly evolving LLM capabilities, we propose a more flexible benchmarking approach. Our method, \textit{\textbf{Varco Arena}}, provides reference-free benchmarking of LLMs in tournament style. \textit{\textbf{Varco Arena}} directly compares LLM outputs across a diverse set of prompts, determining model rankings through a single-elimination tournament structure. This direct pairwise comparison offers two key advantages: (1) Direct comparison, unmediated by reference text, more effectively orders competing LLMs, resulting in more reliable rankings, and (2) reference-free approach to benchmarking adds flexibility in updating benchmark prompts by eliminating the need for quality references. Our empirical results, supported by simulation experiments, demonstrate that the \textit{\textbf{Varco Arena}} tournament approach aligns better with the current Elo model for benchmarking LLMs. The alignment is measured in terms of Spearman correlation, showing improvement over current practice of benchmarking that use reference outputs as comparison \textit{anchor}s.
Align-to-Distill: Trainable Attention Alignment for Knowledge Distillation in Neural Machine Translation
Mar 03, 2024The advent of scalable deep models and large datasets has improved the performance of Neural Machine Translation. Knowledge Distillation (KD) enhances efficiency by transferring knowledge from a teacher model to a more compact student model. However, KD approaches to Transformer architecture often rely on heuristics, particularly when deciding which teacher layers to distill from. In this paper, we introduce the 'Align-to-Distill' (A2D) strategy, designed to address the feature mapping problem by adaptively aligning student attention heads with their teacher counterparts during training. The Attention Alignment Module in A2D performs a dense head-by-head comparison between student and teacher attention heads across layers, turning the combinatorial mapping heuristics into a learning problem. Our experiments show the efficacy of A2D, demonstrating gains of up to +3.61 and +0.63 BLEU points for WMT-2022 De->Dsb and WMT-2014 En->De, respectively, compared to Transformer baselines.
HaRiM$^+$: Evaluating Summary Quality with Hallucination Risk
Nov 24, 2022



One of the challenges of developing a summarization model arises from the difficulty in measuring the factual inconsistency of the generated text. In this study, we reinterpret the decoder overconfidence-regularizing objective suggested in (Miao et al., 2021) as a hallucination risk measurement to better estimate the quality of generated summaries. We propose a reference-free metric, HaRiM+, which only requires an off-the-shelf summarization model to compute the hallucination risk based on token likelihoods. Deploying it requires no additional training of models or ad-hoc modules, which usually need alignment to human judgments. For summary-quality estimation, HaRiM+ records state-of-the-art correlation to human judgment on three summary-quality annotation sets: FRANK, QAGS, and SummEval. We hope that our work, which merits the use of summarization models, facilitates the progress of both automated evaluation and generation of summary.
* 9 pages (+ 21 pages of Appendix), AACL 2022
Learning to Write with Coherence From Negative Examples
Sep 22, 2022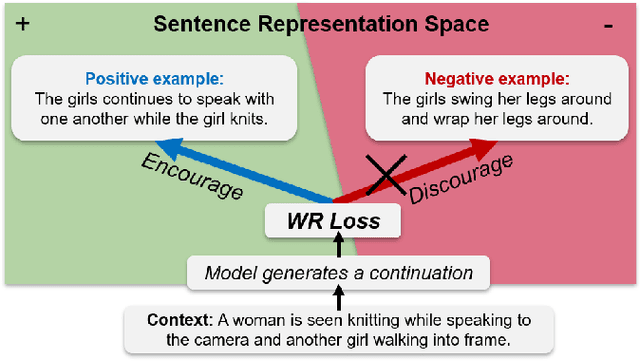
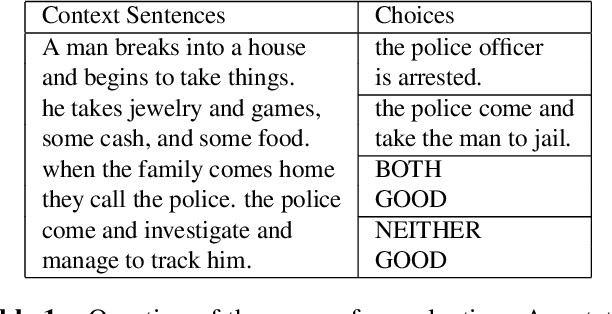
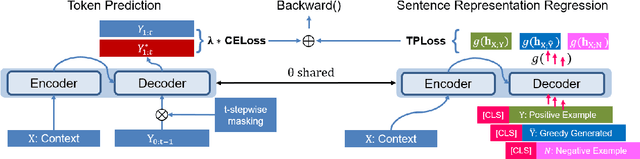
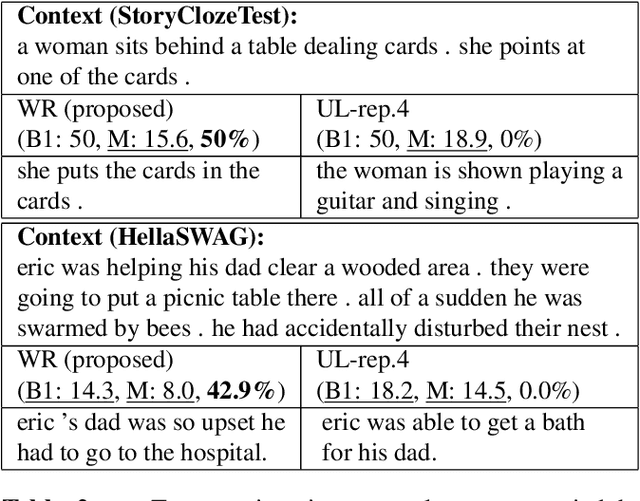
Coherence is one of the critical factors that determine the quality of writing. We propose writing relevance (WR) training method for neural encoder-decoder natural language generation (NLG) models which improves coherence of the continuation by leveraging negative examples. WR loss regresses the vector representation of the context and generated sentence toward positive continuation by contrasting it with the negatives. We compare our approach with Unlikelihood (UL) training in a text continuation task on commonsense natural language inference (NLI) corpora to show which method better models the coherence by avoiding unlikely continuations. The preference of our approach in human evaluation shows the efficacy of our method in improving coherence.
GLAC Net: GLocal Attention Cascading Networks for Multi-image Cued Story Generation
Jun 24, 2018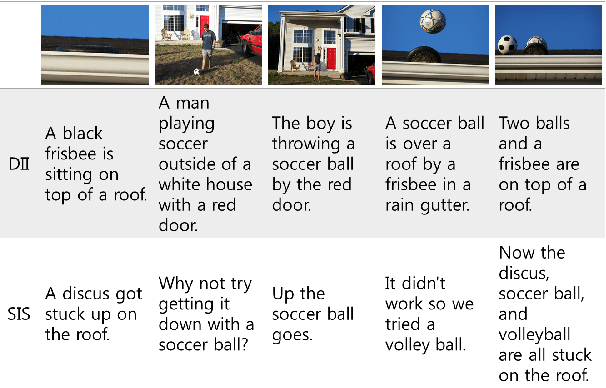
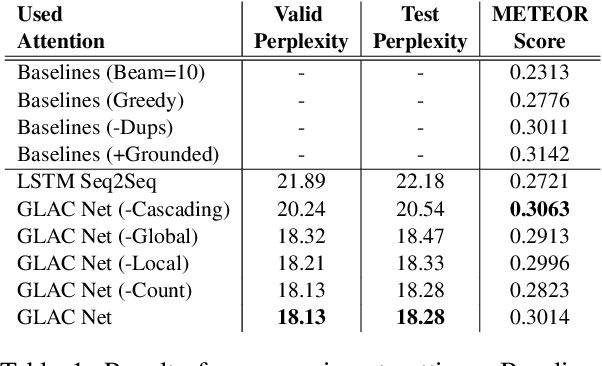
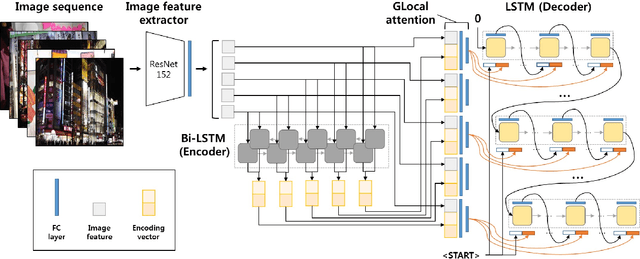
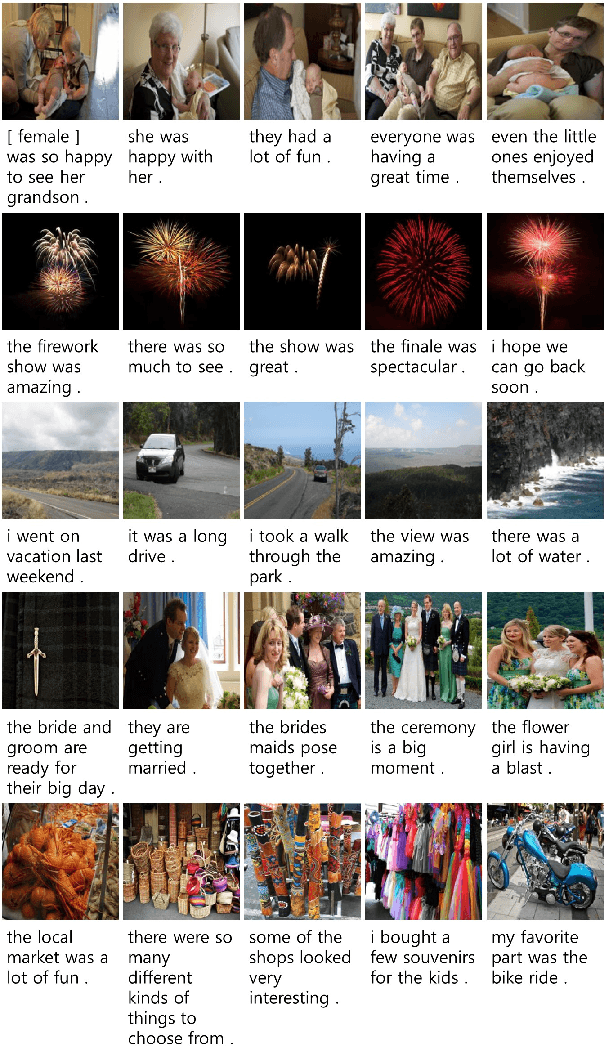
The task of multi-image cued story generation, such as visual storytelling dataset (VIST) challenge, is to compose multiple coherent sentences from a given sequence of images. The main difficulty is how to generate image-specific sentences within the context of overall images. Here we propose a deep learning network model, GLAC Net, that generates visual stories by combining global-local (glocal) attention and context cascading mechanisms. The model incorporates two levels of attention, i.e., overall encoding level and image feature level, to construct image-dependent sentences. While standard attention configuration needs a large number of parameters, the GLAC Net implements them in a very simple way via hard connections from the outputs of encoders or image features onto the sentence generators. The coherency of the generated story is further improved by conveying (cascading) the information of the previous sentence to the next sentence serially. We evaluate the performance of the GLAC Net on the visual storytelling dataset (VIST) and achieve very competitive results compared to the state-of-the-art techniques.