 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHomeEmergency -- Using Audio to Find and Respond to Emergencies in the Home
Apr 01, 2025In the United States alone accidental home deaths exceed 128,000 per year. Our work aims to enable home robots who respond to emergency scenarios in the home, preventing injuries and deaths. We introduce a new dataset of household emergencies based in the ThreeDWorld simulator. Each scenario in our dataset begins with an instantaneous or periodic sound which may or may not be an emergency. The agent must navigate the multi-room home scene using prior observations, alongside audio signals and images from the simulator, to determine if there is an emergency or not. In addition to our new dataset, we present a modular approach for localizing and identifying potential home emergencies. Underpinning our approach is a novel probabilistic dynamic scene graph (P-DSG), where our key insight is that graph nodes corresponding to agents can be represented with a probabilistic edge. This edge, when refined using Bayesian inference, enables efficient and effective localization of agents in the scene. We also utilize multi-modal vision-language models (VLMs) as a component in our approach, determining object traits (e.g. flammability) and identifying emergencies. We present a demonstration of our method completing a real-world version of our task on a consumer robot, showing the transferability of both our task and our method. Our dataset will be released to the public upon this papers publication.
VLPG-Nav: Object Navigation Using Visual Language Pose Graph and Object Localization Probability Maps
Aug 15, 2024



We present VLPG-Nav, a visual language navigation method for guiding robots to specified objects within household scenes. Unlike existing methods primarily focused on navigating the robot toward objects, our approach considers the additional challenge of centering the object within the robot's camera view. Our method builds a visual language pose graph (VLPG) that functions as a spatial map of VL embeddings. Given an open vocabulary object query, we plan a viewpoint for object navigation using the VLPG. Despite navigating to the viewpoint, real-world challenges like object occlusion, displacement, and the robot's localization error can prevent visibility. We build an object localization probability map that leverages the robot's current observations and prior VLPG. When the object isn't visible, the probability map is updated and an alternate viewpoint is computed. In addition, we propose an object-centering formulation that locally adjusts the robot's pose to center the object in the camera view. We evaluate the effectiveness of our approach through simulations and real-world experiments, evaluating its ability to successfully view and center the object within the camera field of view. VLPG-Nav demonstrates improved performance in locating the object, navigating around occlusions, and centering the object within the robot's camera view, outperforming the selected baselines in the evaluation metrics.
LOC-ZSON: Language-driven Object-Centric Zero-Shot Object Retrieval and Navigation
May 08, 2024



In this paper, we present LOC-ZSON, a novel Language-driven Object-Centric image representation for object navigation task within complex scenes. We propose an object-centric image representation and corresponding losses for visual-language model (VLM) fine-tuning, which can handle complex object-level queries. In addition, we design a novel LLM-based augmentation and prompt templates for stability during training and zero-shot inference. We implement our method on Astro robot and deploy it in both simulated and real-world environments for zero-shot object navigation. We show that our proposed method can achieve an improvement of 1.38 - 13.38% in terms of text-to-image recall on different benchmark settings for the retrieval task. For object navigation, we show the benefit of our approach in simulation and real world, showing 5% and 16.67% improvement in terms of navigation success rate, respectively.
Lighthouses and Global Graph Stabilization: Active SLAM for Low-compute, Narrow-FoV Robots
Jun 18, 2023Autonomous exploration to build a map of an unknown environment is a fundamental robotics problem. However, the quality of the map directly influences the quality of subsequent robot operation. Instability in a simultaneous localization and mapping (SLAM) system can lead to poorquality maps and subsequent navigation failures during or after exploration. This becomes particularly noticeable in consumer robotics, where compute budget and limited field-of-view are very common. In this work, we propose (i) the concept of lighthouses: panoramic views with high visual information content that can be used to maintain the stability of the map locally in their neighborhoods and (ii) the final stabilization strategy for global pose graph stabilization. We call our novel exploration strategy SLAM-aware exploration (SAE) and evaluate its performance on real-world home environments.
* 7 pages, 7 figures
Persuasion for Good: Towards a Personalized Persuasive Dialogue System for Social Good
Jun 16, 2019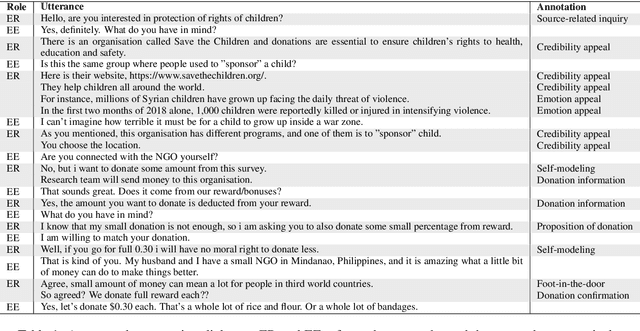
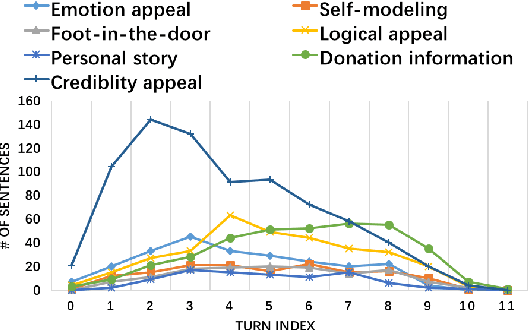
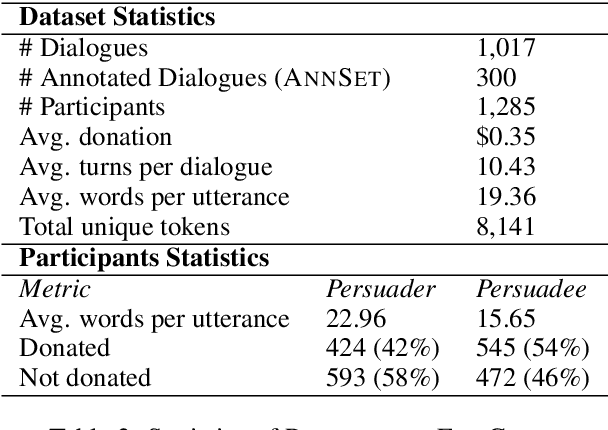
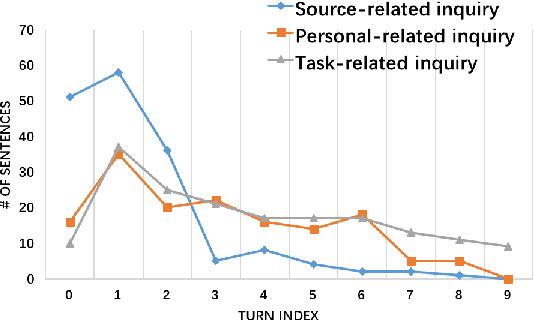
Developing intelligent persuasive conversational agents to change people's opinions and actions for social good is the frontier in advancing the ethical development of automated dialogue systems. To do so, the first step is to understand the intricate organization of strategic disclosures and appeals employed in human persuasion conversations. We designed an online persuasion task where one participant was asked to persuade the other to donate to a specific charity. We collected a large dataset with 1,017 dialogues and annotated emerging persuasion strategies from a subset. Based on the annotation, we built a baseline classifier with context information and sentence-level features to predict the 10 persuasion strategies used in the corpus. Furthermore, to develop an understanding of personalized persuasion processes, we analyzed the relationships between individuals' demographic and psychological backgrounds including personality, morality, value systems, and their willingness for donation. Then, we analyzed which types of persuasion strategies led to a greater amount of donation depending on the individuals' personal backgrounds. This work lays the ground for developing a personalized persuasive dialogue system.
A Computational Model of Commonsense Moral Decision Making
Jan 12, 2018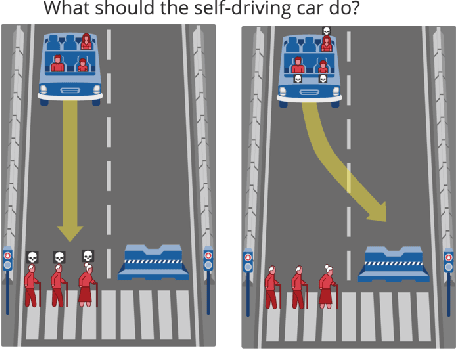
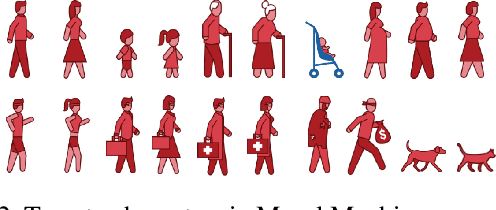
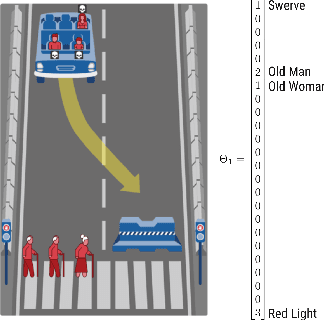
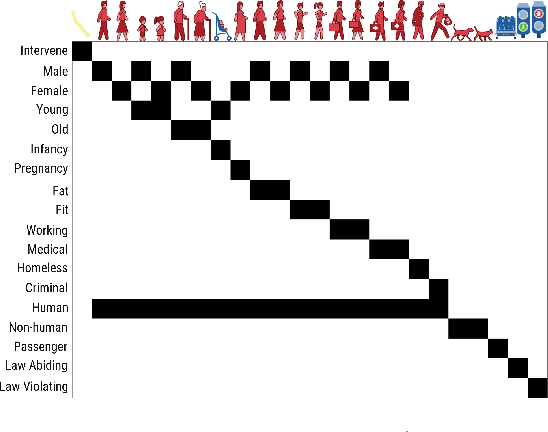
We introduce a new computational model of moral decision making, drawing on a recent theory of commonsense moral learning via social dynamics. Our model describes moral dilemmas as a utility function that computes trade-offs in values over abstract moral dimensions, which provide interpretable parameter values when implemented in machine-led ethical decision-making. Moreover, characterizing the social structures of individuals and groups as a hierarchical Bayesian model, we show that a useful description of an individual's moral values - as well as a group's shared values - can be inferred from a limited amount of observed data. Finally, we apply and evaluate our approach to data from the Moral Machine, a web application that collects human judgments on moral dilemmas involving autonomous vehicles.