 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnobserved Object Detection using Generative Models
Oct 08, 2024



Can we detect an object that is not visible in an image? This study introduces the novel task of 2D and 3D unobserved object detection for predicting the location of objects that are occluded or lie outside the image frame. We adapt several state-of-the-art pre-trained generative models to solve this task, including 2D and 3D diffusion models and vision--language models, and show that they can be used to infer the presence of objects that are not directly observed. To benchmark this task, we propose a suite of metrics that captures different aspects of performance. Our empirical evaluations on indoor scenes from the RealEstate10k dataset with COCO object categories demonstrate results that motivate the use of generative models for the unobserved object detection task. The current work presents a promising step towards compelling applications like visual search and probabilistic planning that can leverage object detection beyond what can be directly observed.
Task and Motion Planning for Execution in the Real
Jun 05, 2024



Task and motion planning represents a powerful set of hybrid planning methods that combine reasoning over discrete task domains and continuous motion generation. Traditional reasoning necessitates task domain models and enough information to ground actions to motion planning queries. Gaps in this knowledge often arise from sources like occlusion or imprecise modeling. This work generates task and motion plans that include actions cannot be fully grounded at planning time. During execution, such an action is handled by a provided human-designed or learned closed-loop behavior. Execution combines offline planned motions and online behaviors till reaching the task goal. Failures of behaviors are fed back as constraints to find new plans. Forty real-robot trials and motivating demonstrations are performed to evaluate the proposed framework and compare against state-of-the-art. Results show faster execution time, less number of actions, and more success in problems where diverse gaps arise. The experiment data is shared for researchers to simulate these settings. The work shows promise in expanding the applicable class of realistic partially grounded problems that robots can address.
Asynchronous Task Plan Refinement for Multi-Robot Task and Motion Planning
Sep 16, 2023This paper explores general multi-robot task and motion planning, where multiple robots in close proximity manipulate objects while satisfying constraints and a given goal. In particular, we formulate the plan refinement problem--which, given a task plan, finds valid assignments of variables corresponding to solution trajectories--as a hybrid constraint satisfaction problem. The proposed algorithm follows several design principles that yield the following features: (1) efficient solution finding due to sequential heuristics and implicit time and roadmap representations, and (2) maximized feasible solution space obtained by introducing minimally necessary coordination-induced constraints and not relying on prevalent simplifications that exist in the literature. The evaluation results demonstrate the planning efficiency of the proposed algorithm, outperforming the synchronous approach in terms of makespan.
Robots as AI Double Agents: Privacy in Motion Planning
Aug 07, 2023



Robotics and automation are poised to change the landscape of home and work in the near future. Robots are adept at deliberately moving, sensing, and interacting with their environments. The pervasive use of this technology promises societal and economic payoffs due to its capabilities - conversely, the capabilities of robots to move within and sense the world around them is susceptible to abuse. Robots, unlike typical sensors, are inherently autonomous, active, and deliberate. Such automated agents can become AI double agents liable to violate the privacy of coworkers, privileged spaces, and other stakeholders. In this work we highlight the understudied and inevitable threats to privacy that can be posed by the autonomous, deliberate motions and sensing of robots. We frame the problem within broader sociotechnological questions alongside a comprehensive review. The privacy-aware motion planning problem is formulated in terms of cost functions that can be modified to induce privacy-aware behavior - preserving, agnostic, or violating. Simulated case studies in manipulation and navigation, with altered cost functions, are used to demonstrate how privacy-violating threats can be easily injected, sometimes with only small changes in performance (solution path lengths). Such functionality is already widely available. This preliminary work is meant to lay the foundations for near-future, holistic, interdisciplinary investigations that can address questions surrounding privacy in intelligent robotic behaviors determined by planning algorithms.
Task-driven Perception and Manipulation for Constrained Placement of Unknown Objects
Jun 28, 2020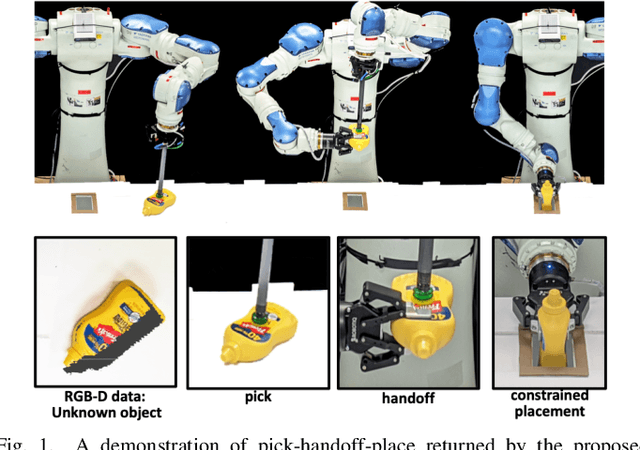

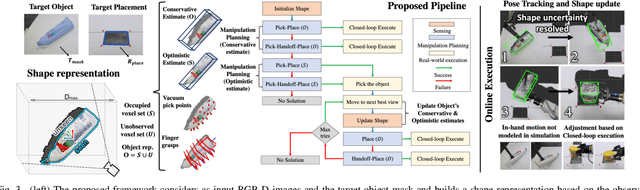
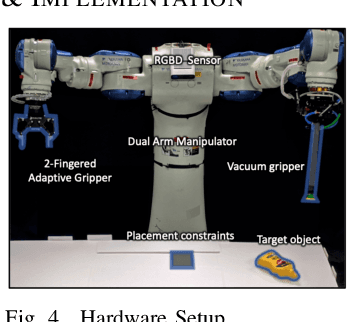
Recent progress in robotic manipulation has dealt with the case of previously unknown objects in the context of relatively simple tasks, such as bin-picking. Existing methods for more constrained problems, however, such as deliberate placement in a tight region, depend more critically on shape information to achieve safe execution. This work deals with pick-and-constrained placement of objects without access to geometric models. The objective is to pick an object and place it safely inside a desired goal region without any collisions, while minimizing the time and the sensing operations required to complete the task. An algorithmic framework is proposed for this purpose, which performs manipulation planning simultaneously over a conservative and an optimistic estimate of the object's volume. The conservative estimate ensures that the manipulation is safe while the optimistic estimate guides the sensor-based manipulation process when no solution can be found for the conservative estimate. To maintain these estimates and dynamically update them during manipulation, objects are represented by a simple volumetric representation, which stores sets of occupied and unseen voxels. The effectiveness of the proposed approach is demonstrated by developing a robotic system that picks a previously unseen object from a table-top and places it in a constrained space. The system comprises of a dual-arm manipulator with heterogeneous end-effectors and leverages hand-offs as a re-grasping strategy. Real-world experiments show that straightforward pick-sense-and-place alternatives frequently fail to solve pick-and-constrained placement problems. The proposed pipeline, however, achieves more than 95% success rate and faster execution times as evaluated over multiple physical experiments.
Synchronized Multi-Arm Rearrangement Guided by Mode Graphs with Capacity Constraints
May 18, 2020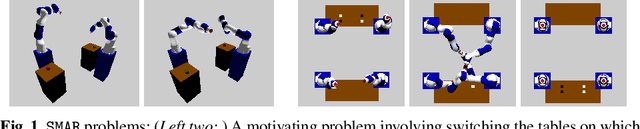
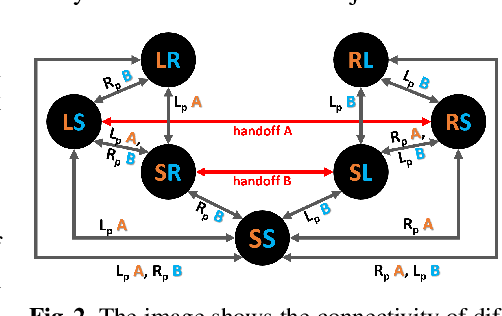
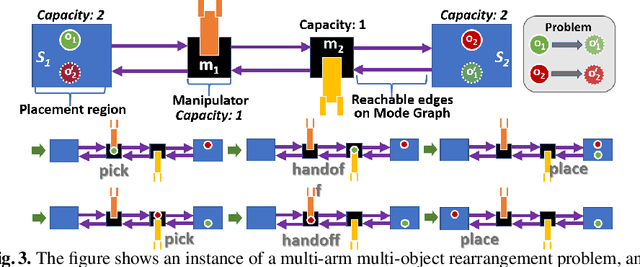
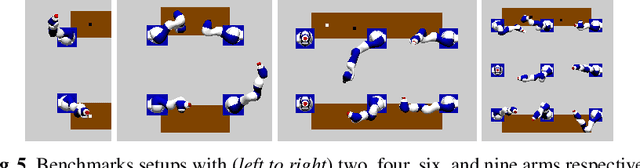
Solving task planning problems involving multiple objects and multiple robotic arms poses scalability challenges. Such problems involve not only coordinating multiple high-DoF arms, but also searching through possible sequences of actions including object placements, and handoffs. The current work identifies a useful connection between multi-arm rearrangement and recent results in multi-body path planning on graphs with vertex capacity constraints. Solving a synchronized multi-arm rearrangement at a high-level involves reasoning over a modal graph, where nodes correspond to stable object placements and object transfer states by the arms. Edges of this graph correspond to pick, placement and handoff operations. The objects can be viewed as pebbles moving over this graph, which has capacity constraints. For instance, each arm can carry a single object but placement locations can accumulate many objects. Efficient integer linear programming-based solvers have been proposed for the corresponding pebble problem. The current work proposes a heuristic to guide the task planning process for synchronized multi-arm rearrangement. Results indicate good scalability to multiple arms and objects, and an algorithm that can find high-quality solutions fast and exhibiting desirable anytime behavior.
That and There: Judging the Intent of Pointing Actions with Robotic Arms
Dec 13, 2019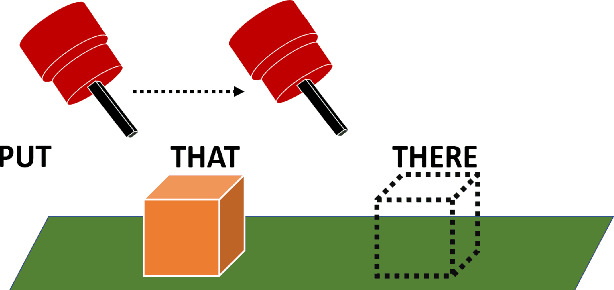
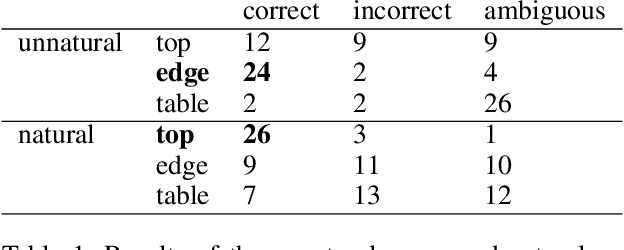
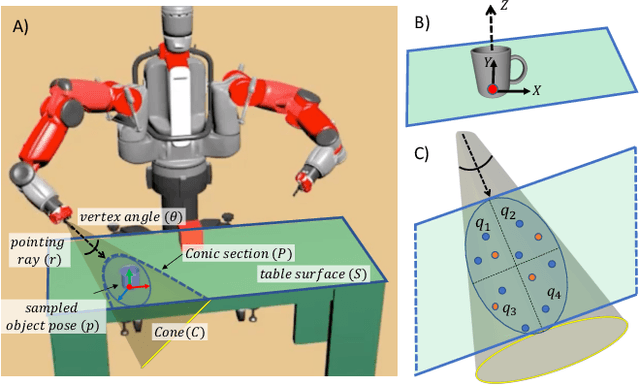
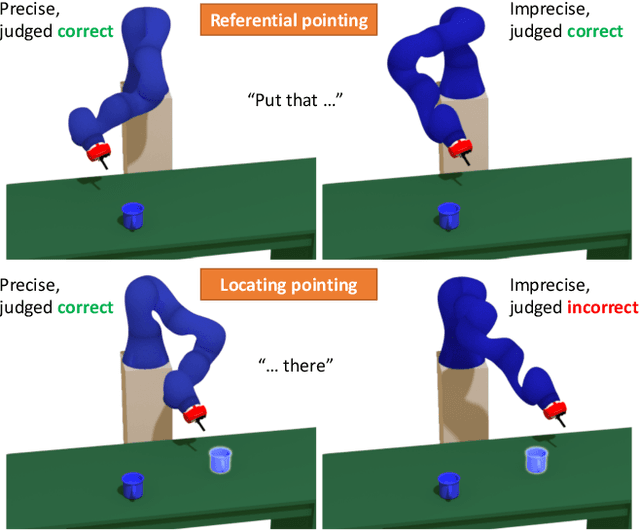
Collaborative robotics requires effective communication between a robot and a human partner. This work proposes a set of interpretive principles for how a robotic arm can use pointing actions to communicate task information to people by extending existing models from the related literature. These principles are evaluated through studies where English-speaking human subjects view animations of simulated robots instructing pick-and-place tasks. The evaluation distinguishes two classes of pointing actions that arise in pick-and-place tasks: referential pointing (identifying objects) and locating pointing (identifying locations). The study indicates that human subjects show greater flexibility in interpreting the intent of referential pointing compared to locating pointing, which needs to be more deliberate. The results also demonstrate the effects of variation in the environment and task context on the interpretation of pointing. Our corpus, experiments and design principles advance models of context, common sense reasoning and communication in embodied communication.
Asymptotically Optimal Sampling-based Planners
Nov 11, 2019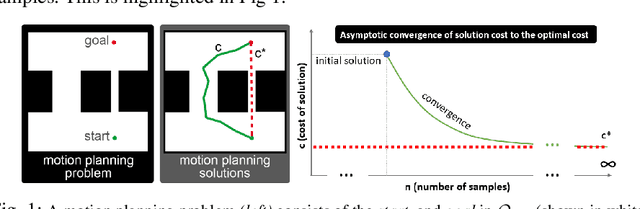
An asymptotically optimal sampling-based planner employs sampling to solve robot motion planning problems and returns paths with a cost that converges to the optimal solution cost, as the number of samples approaches infinity. This comprehensive article covers the theoretical characteristics of asymptotic optimality of motion planning algorithms, and traces its origins, analysis models, practical performance, extensions, and applications.
Anytime Multi-arm Task and Motion Planning for Pick-and-Place of Individual Objects via Handoffs
May 08, 2019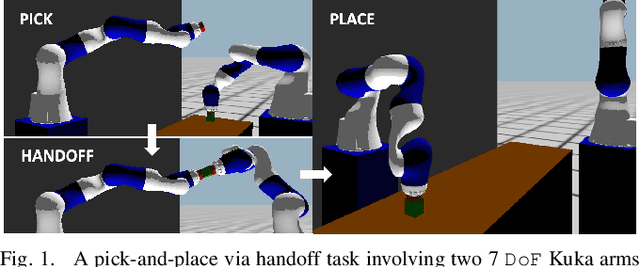
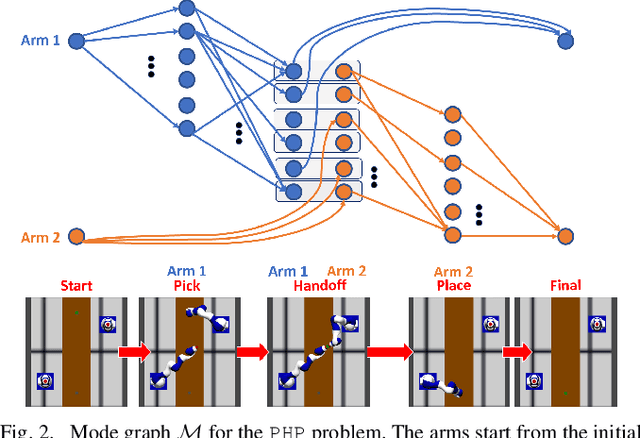
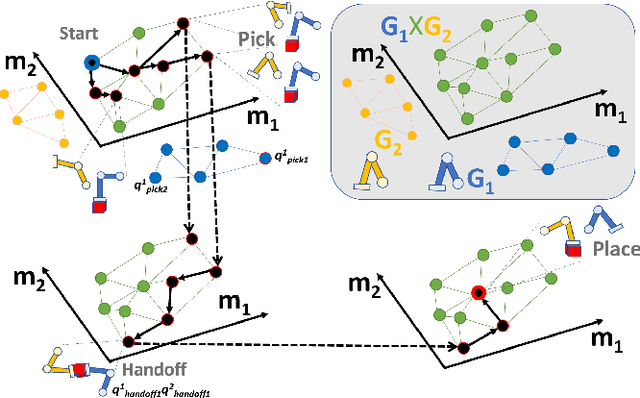
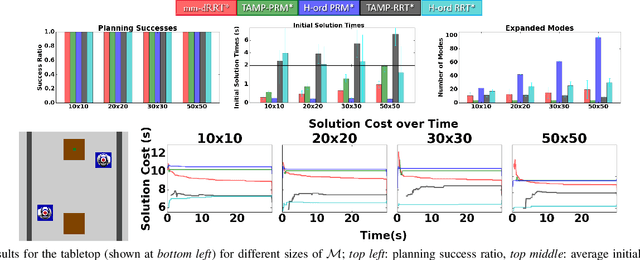
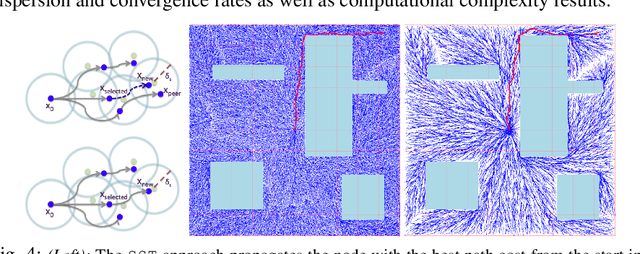
Automation applications are pushing the deployment of many high DoF manipulators in warehouse and manufacturing environments. This has motivated many efforts on optimizing manipulation tasks involving a single arm. Coordinating multiple arms for manipulation, however, introduces additional computational challenges arising from the increased DoFs, as well as the combinatorial increase in the available operations that many manipulators can perform, including handoffs between arms. The focus here is on the case of pick-and-place tasks, which require a sequence of handoffs to be executed, so as to achieve computational efficiency, asymptotic optimality and practical anytime performance. The paper leverages recent advances in multi-robot motion planning for high DoF systems to propose a novel multi-modal extension of the dRRT* algorithm. The key insight is that, instead of naively solving a sequence of motion planning problems, it is computationally advantageous to directly explore the composite space of the integrated multi-arm task and motion planning problem, given input sets of possible pick and handoff configurations. Asymptotic optimality guarantees are possible by sampling additional picks and handoffs over time. The evaluation shows that the approach finds initial solutions fast and improves their quality over time. It also succeeds in finding solutions to harder problem instances relative to alternatives and can scale effectively as the number of robots increases.
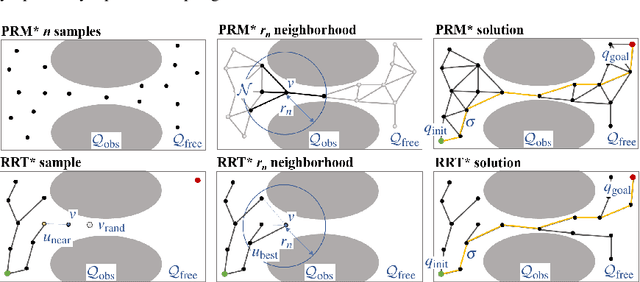
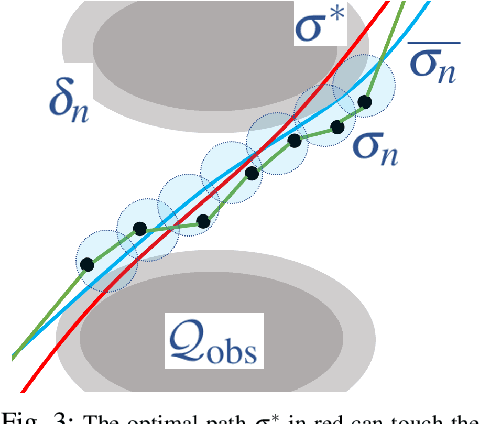
Pushing the Boundaries of Asymptotic Optimality for Sampling-based Roadmaps In Motion And Task Planning
Mar 19, 2019
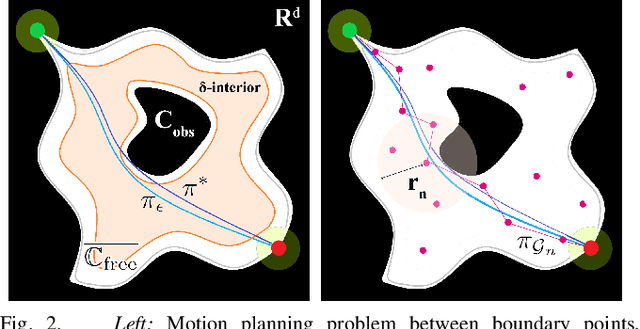
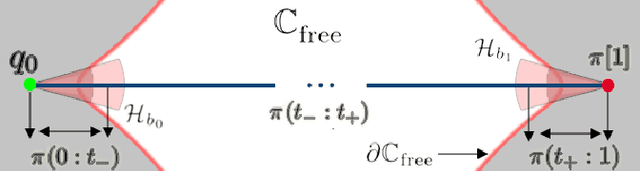
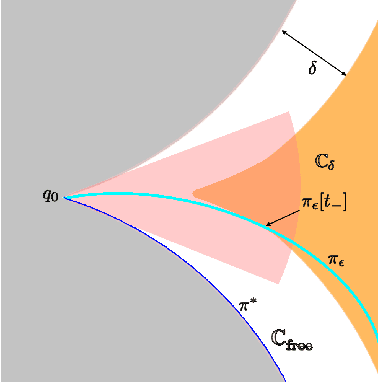
Sampling-based roadmaps have been popular methods for robot motion and task planning, given their generality and effectiveness in high-dimensional configuration spaces (C-spaces). Following advances in random geometric graphs, a seminal analysis result argued the conditions for asymptotic optimality of these approaches. In particular, a connection radius for each new C-space sample needs to be in the order of $ \gamma (\log n / n)^{1/d} $, where $n$ is the existing number of roadmap nodes and $d$ is the dimensionality of the C-space. This prior analysis, as well as subsequent efforts, also specified a sufficient lower bound for the constant $\gamma$ for asymptotic optimality. All of these results assumed that for a finite number of samples there is a path with positive clearance from obstacles. Nevertheless, manipulation task planning requires solving problems were the start and the goal lie on the boundary of the configuration space. The current work builds on previous work, to: a) obtain an estimate of $\gamma$ in terms of a bound on the dispersion of the samples; and b) propose the modifications necessary to make asymptotic optimality hold when the start and goal lie on the boundary of the C-space under certain assumptions regarding the boundary. The last point generalizes these properties to manipulation task planning and reduces the method's requirements for a connection radius that achieves asymptotic optimality in this domain as well as the assumptions regarding the boundary's smoothness relative to prior work.