 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOM Adjustment Mechanism Control for Multi-Configuration Motion Stability of Unmanned Deformable Vehicle
May 27, 2025An unmanned deformable vehicle is a wheel-legged robot transforming between two configurations: vehicular and humanoid states, with different motion modes and stability characteristics. To address motion stability in multiple configurations, a center-of-mass adjustment mechanism was designed. Further, a motion stability hierarchical control algorithm was proposed, and an electromechanical model based on a two-degree-of-freedom center-of-mass adjustment mechanism was established. An unmanned-deformable-vehicle vehicular-state steady-state steering dynamics model and a gait planning kinematic model of humanoid state walking were established. A stability hierarchical control strategy was designed to realize the stability control. The results showed that the steady-state steering stability in vehicular state and the walking stability in humanoid state could be significantly improved by controlling the slider motion.
Point2Primitive: CAD Reconstruction from Point Cloud by Direct Primitive Prediction
May 04, 2025



Recovering CAD models from point clouds, especially the sketch-extrusion process, can be seen as the process of rebuilding the topology and extrusion primitives. Previous methods utilize implicit fields for sketch representation, leading to shape reconstruction of curved edges. In this paper, we proposed a CAD reconstruction network that produces editable CAD models from input point clouds (Point2Primitive) by directly predicting every element of the extrusion primitives. Point2Primitive can directly detect and predict sketch curves (type and parameter) from point clouds based on an improved transformer. The sketch curve parameters are formulated as position queries and optimized in an autoregressive way, leading to high parameter accuracy. The topology is rebuilt by extrusion segmentation, and each extrusion parameter (sketch and extrusion operation) is recovered by combining the predicted curves and the computed extrusion operation. Extensive experiments demonstrate that our method is superior in primitive prediction accuracy and CAD reconstruction. The reconstructed shapes are of high geometrical fidelity.
Multiple-object Grasping Using a Multiple-suction-cup Vacuum Gripper in Cluttered Scenes
Apr 21, 2023Multiple-suction-cup grasping can improve the efficiency of bin picking in cluttered scenes. In this paper, we propose a grasp planner for a vacuum gripper to use multiple suction cups to simultaneously grasp multiple objects or an object with a large surface. To take on the challenge of determining where to grasp and which cups to activate when grasping, we used 3D convolution to convolve the affordable areas inferred by neural network with the gripper kernel in order to find graspable positions of sampled gripper orientations. The kernel used for 3D convolution in this work was encoded including cup ID information, which helps to directly determine which cups to activate by decoding the convolution results. Furthermore, a sorting algorithm is proposed to find the optimal grasp among the candidates. Our planner exhibited good generality and successfully found multiple-cup grasps in previous affordance map datasets. Our planner also exhibited improved picking efficiency using multiple suction cups in physical robot picking experiments. Compared with single-object (single-cup) grasping, multiple-cup grasping contributed to 1.45x, 1.65x, and 1.16x increases in efficiency for picking boxes, fruits, and daily necessities, respectively.
Learning suction graspability considering grasp quality and robot reachability for bin-picking
Nov 04, 2021
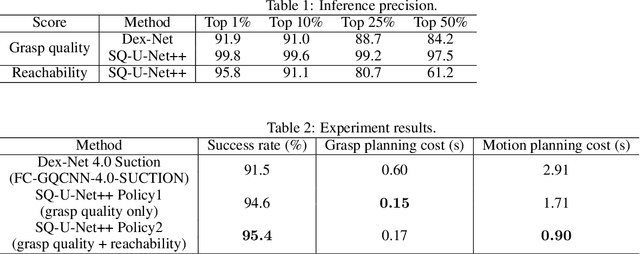
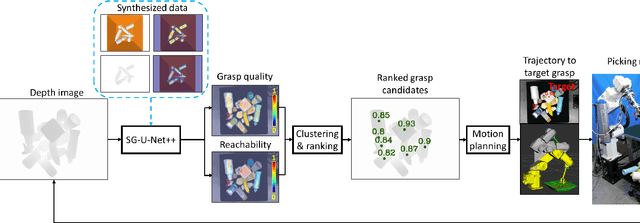
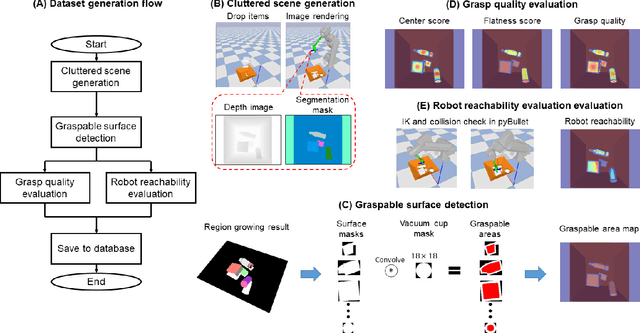
Deep learning has been widely used for inferring robust grasps. Although human-labeled RGB-D datasets were initially used to learn grasp configurations, preparation of this kind of large dataset is expensive. To address this problem, images were generated by a physical simulator, and a physically inspired model (e.g., a contact model between a suction vacuum cup and object) was used as a grasp quality evaluation metric to annotate the synthesized images. However, this kind of contact model is complicated and requires parameter identification by experiments to ensure real world performance. In addition, previous studies have not considered manipulator reachability such as when a grasp configuration with high grasp quality is unable to reach the target due to collisions or the physical limitations of the robot. In this study, we propose an intuitive geometric analytic-based grasp quality evaluation metric. We further incorporate a reachability evaluation metric. We annotate the pixel-wise grasp quality and reachability by the proposed evaluation metric on synthesized images in a simulator to train an auto-encoder--decoder called suction graspability U-Net++ (SG-U-Net++). Experiment results show that our intuitive grasp quality evaluation metric is competitive with a physically-inspired metric. Learning the reachability helps to reduce motion planning computation time by removing obviously unreachable candidates. The system achieves an overall picking speed of 560 PPH (pieces per hour).
Credit Card Fraud Detection Using Autoencoder Neural Network
Aug 30, 2019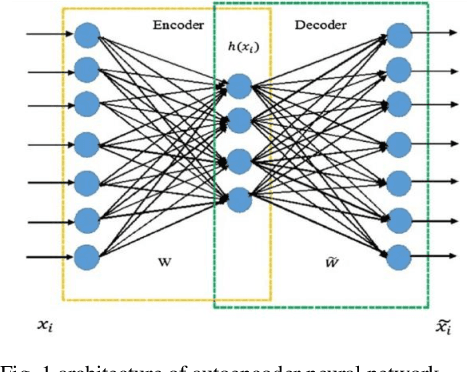
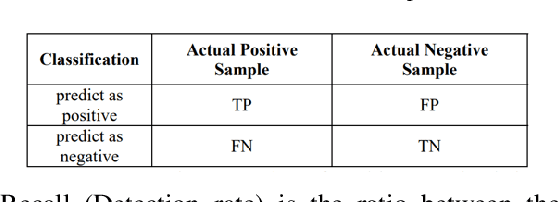
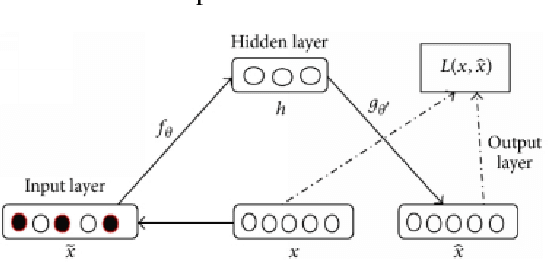
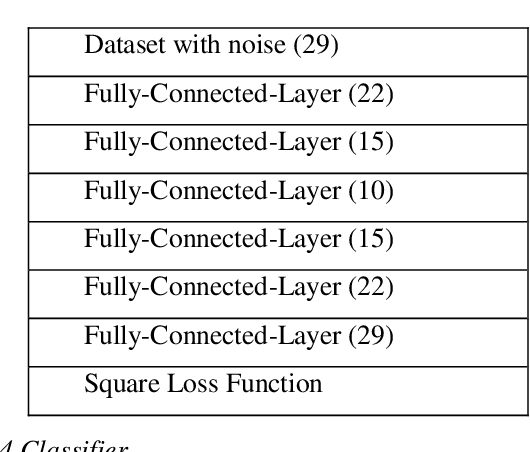
Imbalanced data classification problem has always been a popular topic in the field of machine learning research. In order to balance the samples between majority and minority class. Oversampling algorithm is used to synthesize new minority class samples, but it could bring in noise. Pointing to the noise problems, this paper proposed a denoising autoencoder neural network (DAE) algorithm which can not only oversample minority class sample through misclassification cost, but it can denoise and classify the sampled dataset. Through experiments, compared with the denoising autoencoder neural network (DAE) with oversampling process and traditional fully connected neural networks, the results showed the proposed algorithm improves the classification accuracy of minority class of imbalanced datasets.