 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoltzmann-based Exploration for Robust Decentralized Multi-Agent Planning
Mar 02, 2026Decentralized Monte Carlo Tree Search (Dec-MCTS) is widely used for cooperative multi-agent planning but struggles in sparse or skewed reward environments. We introduce Coordinated Boltzmann MCTS (CB-MCTS), which replaces deterministic UCT with a stochastic Boltzmann policy and a decaying entropy bonus for sustained yet focused exploration. While Boltzmann exploration has been studied in single-agent MCTS, applying it in multi-agent systems poses unique challenges. CB-MCTS is the first to address this. We analyze CB-MCTS in the simple-regret setting and show in simulations that it outperforms Dec-MCTS in deceptive scenarios and remains competitive on standard benchmarks, providing a robust solution for multi-agent planning.
United We Stand: Decentralized Multi-Agent Planning With Attrition
Jul 11, 2024



Decentralized planning is a key element of cooperative multi-agent systems for information gathering tasks. However, despite the high frequency of agent failures in realistic large deployment scenarios, current approaches perform poorly in the presence of failures, by not converging at all, and/or by making very inefficient use of resources (e.g. energy). In this work, we propose Attritable MCTS (A-MCTS), a decentralized MCTS algorithm capable of timely and efficient adaptation to changes in the set of active agents. It is based on the use of a global reward function for the estimation of each agent's local contribution, and regret matching for coordination. We evaluate its effectiveness in realistic data-harvesting problems under different scenarios. We show both theoretically and experimentally that A-MCTS enables efficient adaptation even under high failure rates. Results suggest that, in the presence of frequent failures, our solution improves substantially over the best existing approaches in terms of global utility and scalability.
SMARTS: Scalable Multi-Agent Reinforcement Learning Training School for Autonomous Driving
Nov 01, 2020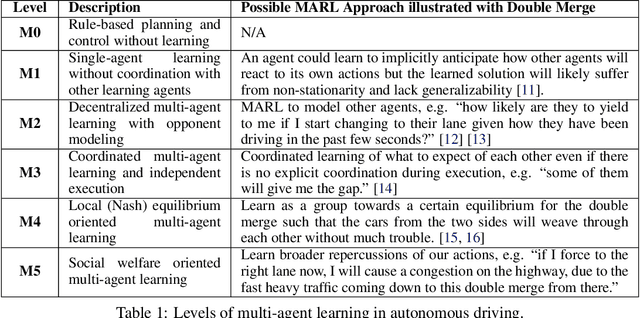
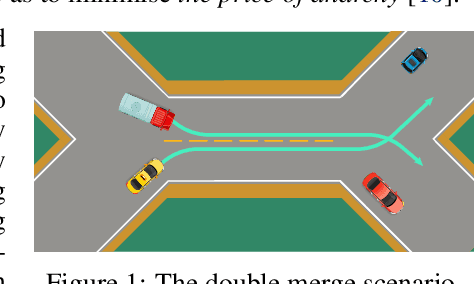
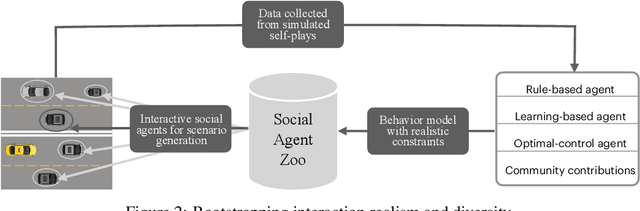
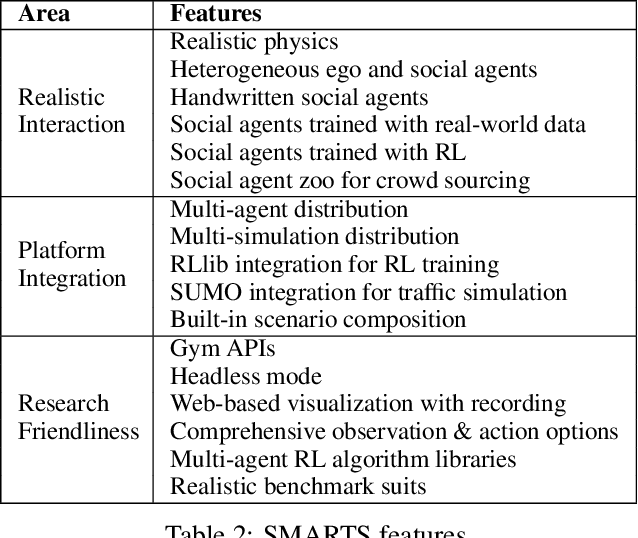
Multi-agent interaction is a fundamental aspect of autonomous driving in the real world. Despite more than a decade of research and development, the problem of how to competently interact with diverse road users in diverse scenarios remains largely unsolved. Learning methods have much to offer towards solving this problem. But they require a realistic multi-agent simulator that generates diverse and competent driving interactions. To meet this need, we develop a dedicated simulation platform called SMARTS (Scalable Multi-Agent RL Training School). SMARTS supports the training, accumulation, and use of diverse behavior models of road users. These are in turn used to create increasingly more realistic and diverse interactions that enable deeper and broader research on multi-agent interaction. In this paper, we describe the design goals of SMARTS, explain its basic architecture and its key features, and illustrate its use through concrete multi-agent experiments on interactive scenarios. We open-source the SMARTS platform and the associated benchmark tasks and evaluation metrics to encourage and empower research on multi-agent learning for autonomous driving. Our code is available at https://github.com/huawei-noah/SMARTS.