 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDESK: A Robotic Activity Dataset for Dexterous Surgical Skills Transfer to Medical Robots
Mar 03, 2019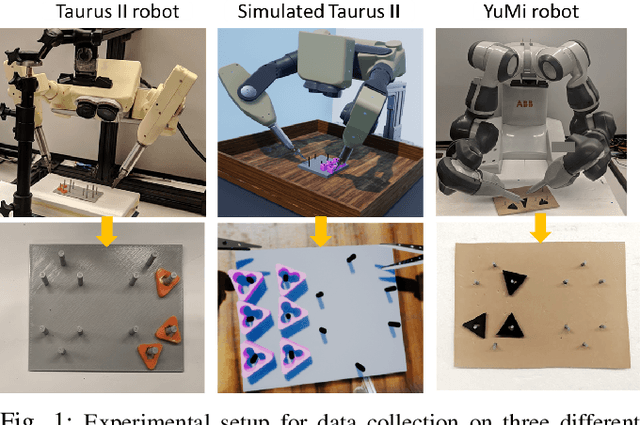
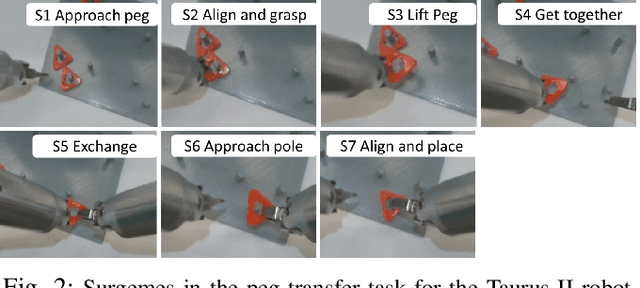
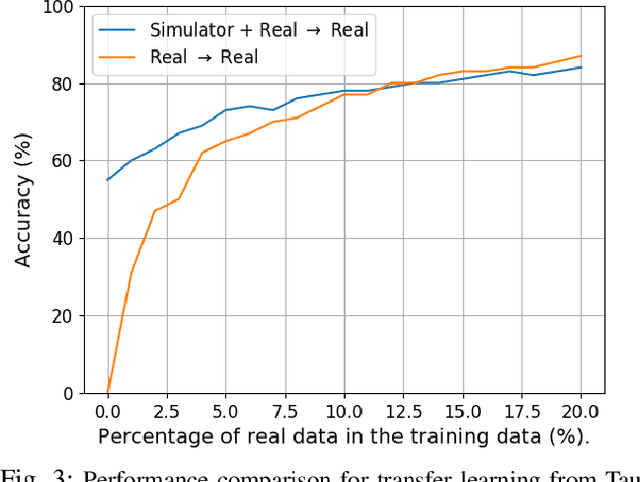
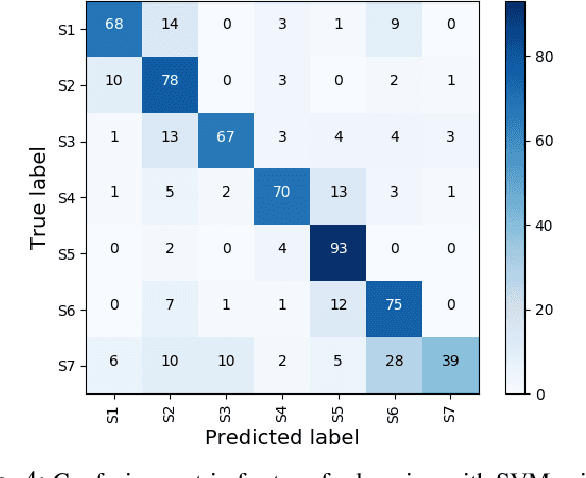
Datasets are an essential component for training effective machine learning models. In particular, surgical robotic datasets have been key to many advances in semi-autonomous surgeries, skill assessment, and training. Simulated surgical environments can enhance the data collection process by making it faster, simpler and cheaper than real systems. In addition, combining data from multiple robotic domains can provide rich and diverse training data for transfer learning algorithms. In this paper, we present the DESK (Dexterous Surgical Skill) dataset. It comprises a set of surgical robotic skills collected during a surgical training task using three robotic platforms: the Taurus II robot, Taurus II simulated robot, and the YuMi robot. This dataset was used to test the idea of transferring knowledge across different domains (e.g. from Taurus to YuMi robot) for a surgical gesture classification task with seven gestures. We explored three different scenarios: 1) No transfer, 2) Transfer from simulated Taurus to real Taurus and 3) Transfer from Simulated Taurus to the YuMi robot. We conducted extensive experiments with three supervised learning models and provided baselines in each of these scenarios. Results show that using simulation data during training enhances the performance on the real robot where limited real data is available. In particular, we obtained an accuracy of 55% on the real Taurus data using a model that is trained only on the simulator data. Furthermore, we achieved an accuracy improvement of 34% when 3% of the real data is added into the training process.
Achieving Synergy in Cognitive Behavior of Humanoids via Deep Learning of Dynamic Visuo-Motor-Attentional Coordination
Jul 09, 2015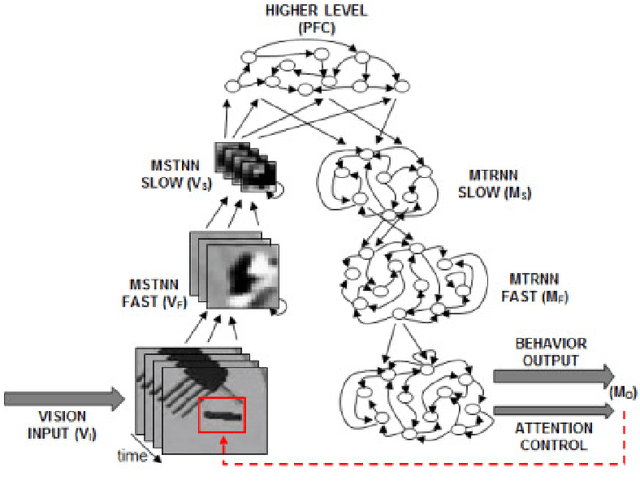
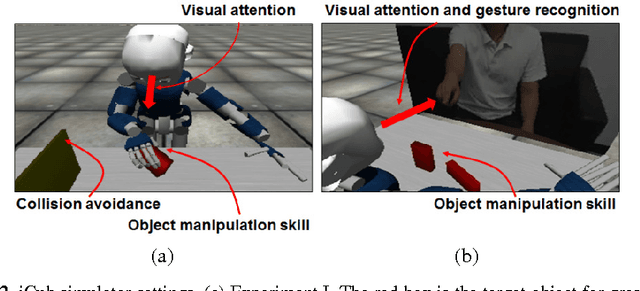
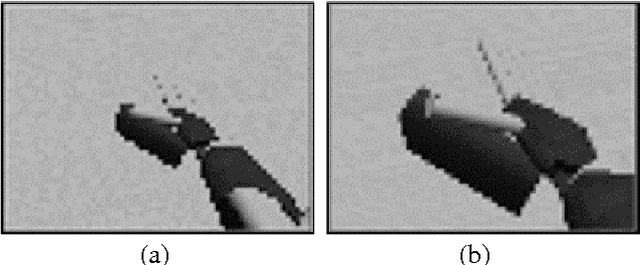
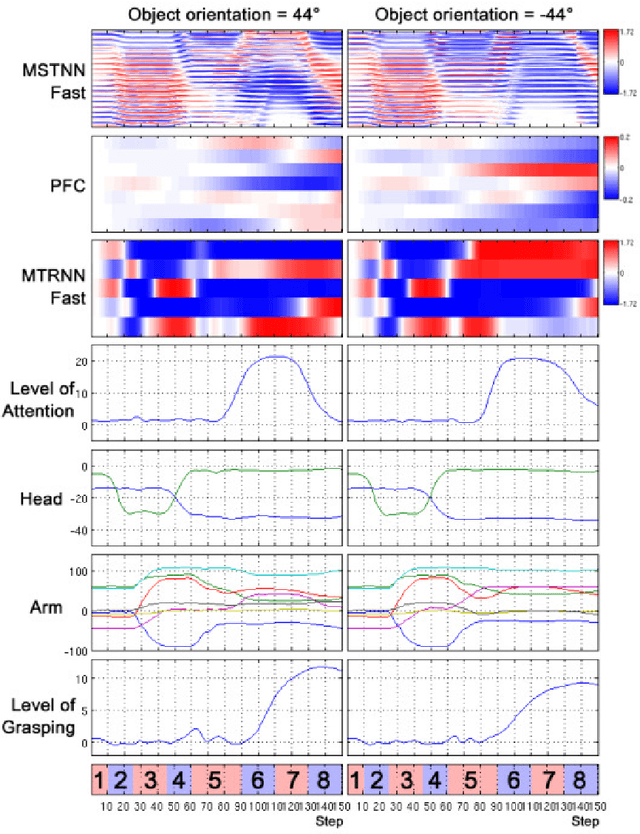
The current study examines how adequate coordination among different cognitive processes including visual recognition, attention switching, action preparation and generation can be developed via learning of robots by introducing a novel model, the Visuo-Motor Deep Dynamic Neural Network (VMDNN). The proposed model is built on coupling of a dynamic vision network, a motor generation network, and a higher level network allocated on top of these two. The simulation experiments using the iCub simulator were conducted for cognitive tasks including visual object manipulation responding to human gestures. The results showed that synergetic coordination can be developed via iterative learning through the whole network when spatio-temporal hierarchy and temporal one can be self-organized in the visual pathway and in the motor pathway, respectively, such that the higher level can manipulate them with abstraction.