 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeodesic Tracing-Based Kinematic Integration of Rolling and Sliding Contact on Manifold Meshes for Dexterous In-Hand Manipulation
Aug 17, 2025



Reasoning about rolling and sliding contact, or roll-slide contact for short, is critical for dexterous manipulation tasks that involve intricate geometries. But existing works on roll-slide contact mostly focus on continuous shapes with differentiable parametrizations. This work extends roll-slide contact modeling to manifold meshes. Specifically, we present an integration scheme based on geodesic tracing to first-order time-integrate roll-slide contact directly on meshes, enabling dexterous manipulation to reason over high-fidelity discrete representations of an object's true geometry. Using our method, we planned dexterous motions of a multi-finger robotic hand manipulating five objects in-hand in simulation. The planning was achieved with a least-squares optimizer that strives to maintain the most stable instantaneous grasp by minimizing contact sliding and spinning. Then, we evaluated our method against a baseline using collision detection and a baseline using primitive shapes. The results show that our method performed the best in accuracy and precision, even for coarse meshes. We conclude with a future work discussion on incorporating multiple contacts and contact forces to achieve accurate and robust mesh-based surface contact modeling.
Fast Estimation of Globally Optimal Independent Contact Regions for Robust Grasping and Manipulation
Jun 10, 2025This work presents a fast anytime algorithm for computing globally optimal independent contact regions (ICRs). ICRs are regions such that one contact within each region enables a valid grasp. Locations of ICRs can provide guidance for grasp and manipulation planning, learning, and policy transfer. However, ICRs for modern applications have been little explored, in part due to the expense of computing them, as they have a search space exponential in the number of contacts. We present a divide and conquer algorithm based on incremental n-dimensional Delaunay triangulation that produces results with bounded suboptimality in times sufficient for real-time planning. This paper presents the base algorithm for grasps where contacts lie within a plane. Our experiments show substantial benefits over competing grasp quality metrics and speedups of 100X and more for competing approaches to computing ICRs. We explore robustness of a policy guided by ICRs and outline a path to general 3D implementation. Code will be released on publication to facilitate further development and applications.
The Foundational Pose as a Selection Mechanism for the Design of Tool-Wielding Multi-Finger Robotic Hands
Sep 21, 2024



To wield an object means to hold and move it in a way that exploits its functions. When we wield tools -- such as writing with a pen or cutting with scissors -- our hands would reach very specific poses, often drastically different from how we pick up the same objects just to transport them. In this work, we investigate the design of tool-wielding multi-finger robotic hands based on a hypothesis: the poses that a tool and a hand reach during tool-wielding -- what we call "foundational poses" (FPs) -- can be used as a selection mechanism in the design process. We interpret FPs as snapshots that capture the workings of underlying mechanisms formed by the tool and the hand, and one hand can form multiple mechanisms with the same tool. We tested our hypothesis in a hand design experiment, where we developed a sampling-based design optimization framework that uses FPs to computationally generate many different hand designs and evaluate them in multiple metrics. The results show that more than $99\%$ of the $10,785$ generated hand designs successfully wielded tools in simulation, supporting our hypothesis. Meanwhile, our methods provide insights into the non-convex, multi-objective hand design optimization problem that could be hard to unveil otherwise, such as clustering and the Pareto front. Lastly, we demonstrate our methods' real-world feasibility and potential with a hardware prototype equipped with rigid endoskeleton and soft skin.
Kinematic Motion Retargeting for Contact-Rich Anthropomorphic Manipulations
Feb 07, 2024



Hand motion capture data is now relatively easy to obtain, even for complicated grasps; however this data is of limited use without the ability to retarget it onto the hands of a specific character or robot. The target hand may differ dramatically in geometry, number of degrees of freedom (DOFs), or number of fingers. We present a simple, but effective framework capable of kinematically retargeting multiple human hand-object manipulations from a publicly available dataset to a wide assortment of kinematically and morphologically diverse target hands through the exploitation of contact areas. We do so by formulating the retarget operation as a non-isometric shape matching problem and use a combination of both surface contact and marker data to progressively estimate, refine, and fit the final target hand trajectory using inverse kinematics (IK). Foundational to our framework is the introduction of a novel shape matching process, which we show enables predictable and robust transfer of contact data over full manipulations while providing an intuitive means for artists to specify correspondences with relatively few inputs. We validate our framework through thirty demonstrations across five different hand shapes and six motions of different objects. We additionally compare our method against existing hand retargeting approaches. Finally, we demonstrate our method enabling novel capabilities such as object substitution and the ability to visualize the impact of design choices over full trajectories.
Towards Very Low-Cost Iterative Prototyping for Fully Printable Dexterous Soft Robotic Hands
Nov 02, 2021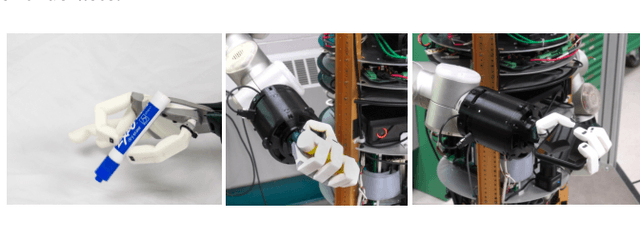
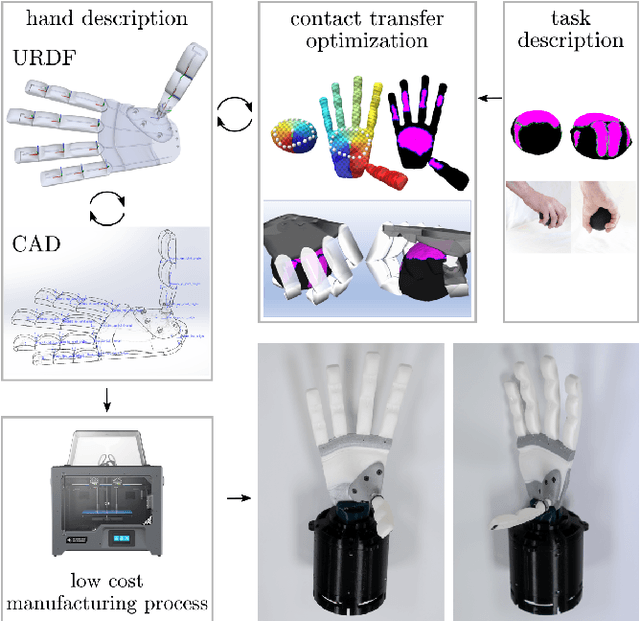
The design and fabrication of soft robot hands is still a time-consuming and difficult process. Advances in rapid prototyping have accelerated the fabrication process significantly while introducing new complexities into the design process. In this work, we present an approach that utilizes novel low-cost fabrication techniques in conjunction with design tools helping soft hand designers to systematically take advantage of multi-material 3D printing to create dexterous soft robotic hands. While very low cost and lightweight, we show that generated designs are highly durable, surprisingly strong, and capable of dexterous grasping.
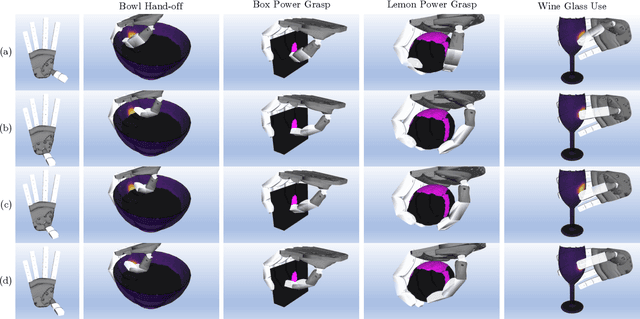
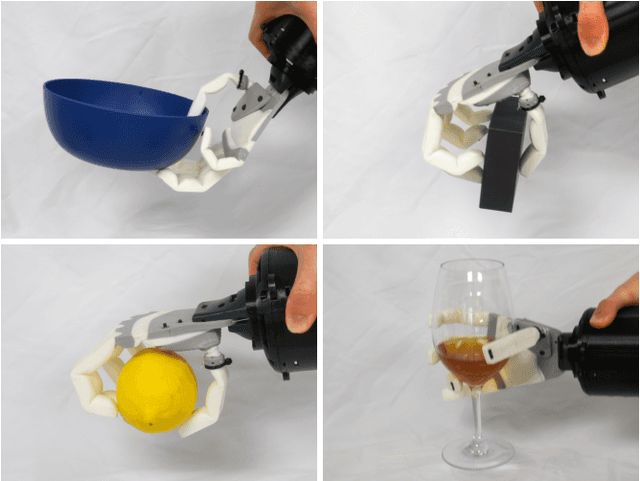
Contact Transfer: A Direct, User-Driven Method for Human to Robot Transfer of Grasps and Manipulations
Oct 29, 2021
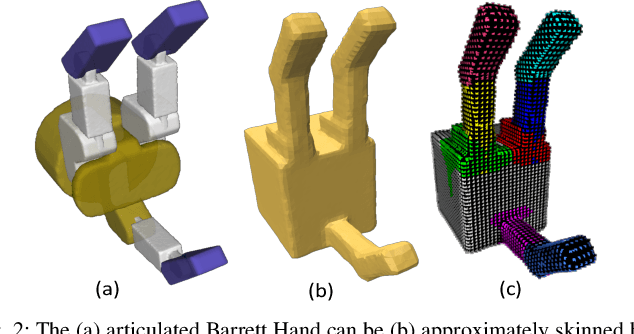
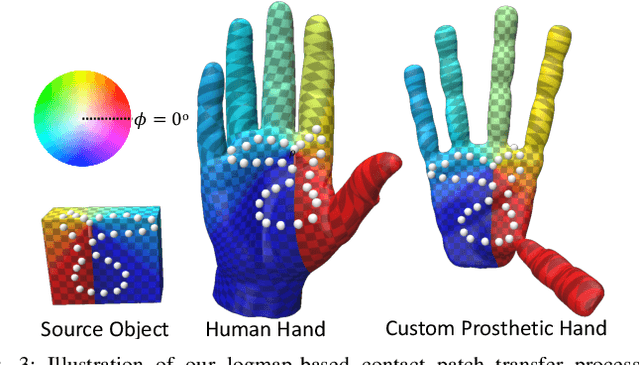

We present a novel method for the direct transfer of grasps and manipulations between objects and hands through utilization of contact areas. Our method fully preserves contact shapes, and in contrast to existing techniques, is not dependent on grasp families, requires no model training or grasp sampling, makes no assumptions about manipulator morphology or kinematics, and allows user control over both transfer parameters and solution optimization. Despite these accommodations, we show that our method is capable of synthesizing kinematically feasible whole hand poses in seconds even for poor initializations or hard to reach contacts. We additionally highlight the method's benefits in both response to design alterations as well as fast approximation over in-hand manipulation sequences. Finally, we demonstrate a solution generated by our method on a physical, custom designed prosthetic hand.
Configuration Lattices for Planar Contact Manipulation Under Uncertainty
Apr 30, 2016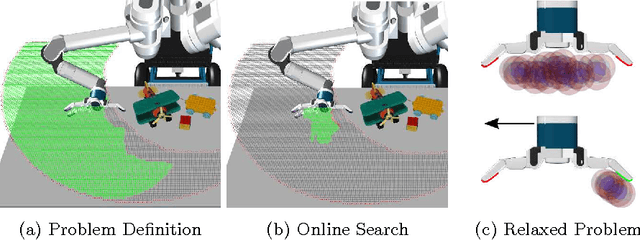
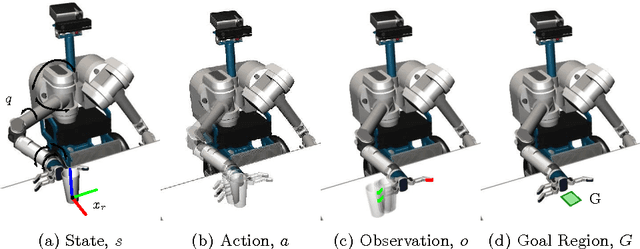
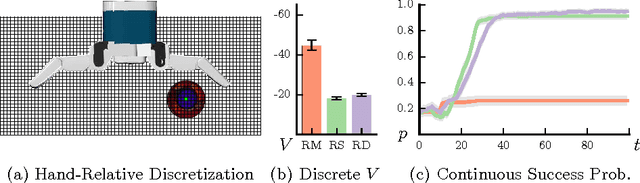
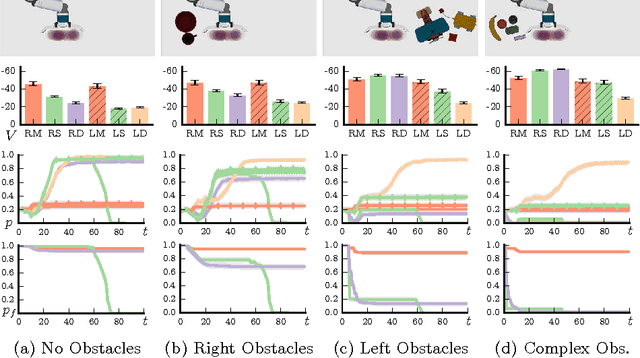
This work addresses the challenge of a robot using real-time feedback from contact sensors to reliably manipulate a movable object on a cluttered tabletop. We formulate contact manipulation as a partially observable Markov decision process (POMDP) in the joint space of robot configurations and object poses. The POMDP formulation enables the robot to actively gather information and reduce the uncertainty on the object pose. Further, it incorporates all major constraints for robot manipulation: kinematic reachability, self-collision, and collision with obstacles. To solve the POMDP, we apply DESPOT, a state-of-the-art online POMDP algorithm. Our approach leverages two key ideas for computational efficiency. First, it performs lazy construction of a configuration-space lattice by interleaving construction of the lattice and online POMDP planning. Second, it combines online and offline POMDP planning by solving relaxed POMDP offline and using the solution to guide the online search algorithm. We evaluated the proposed approach on a seven degree-of-freedom robot arm in simulation environments. It significantly outperforms several existing algorithms, including some commonly used heuristics for contact manipulation under uncertainty.
The Manifold Particle Filter for State Estimation on High-dimensional Implicit Manifolds
Apr 25, 2016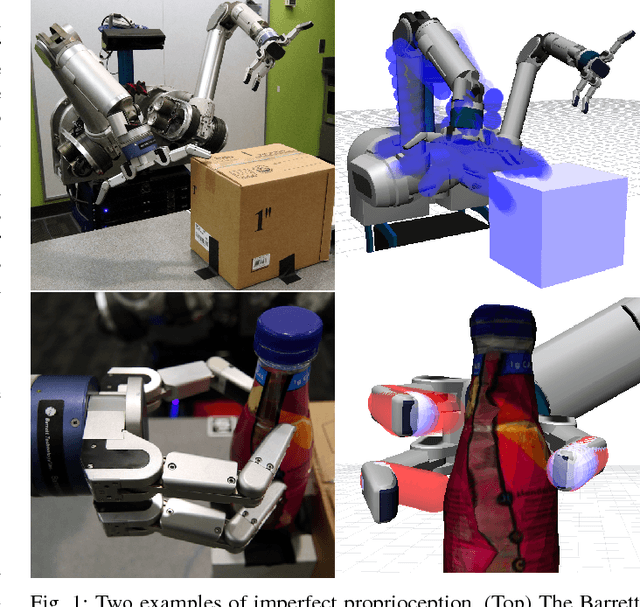
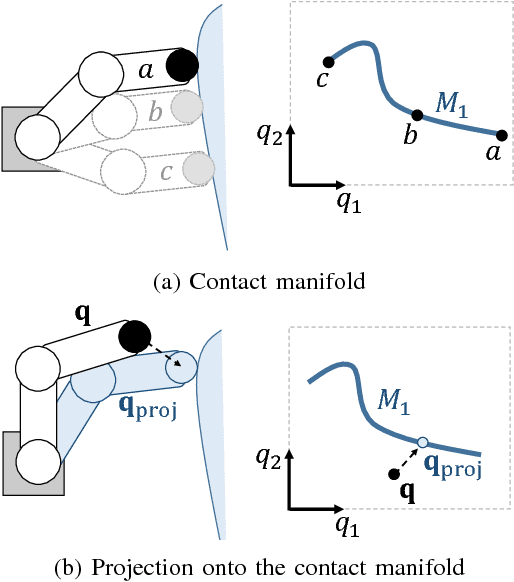
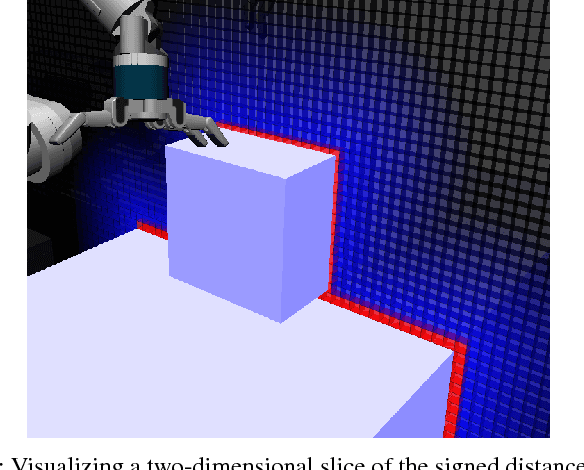
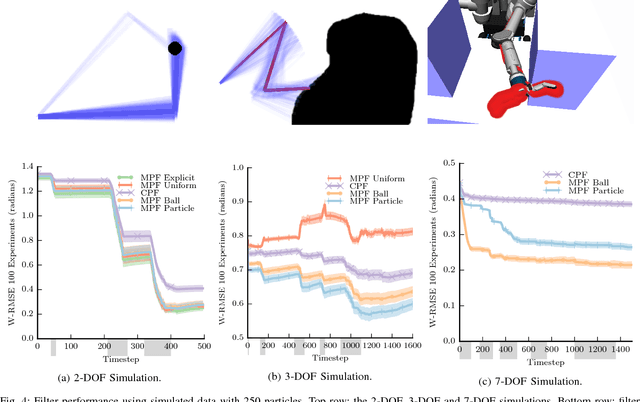
We estimate the state a noisy robot arm and underactuated hand using an Implicit Manifold Particle Filter (MPF) informed by touch sensors. As the robot touches the world, its state space collapses to a contact manifold that we represent implicitly using a signed distance field. This allows us to extend the MPF to higher (six or more) dimensional state spaces. Earlier work (which explicitly represents the contact manifold) only shows the MPF in two or three dimensions. Through a series of experiments, we show that the implicit MPF converges faster and is more accurate than a conventional particle filter during periods of persistent contact. We present three methods of sampling the implicit contact manifold, and compare them in experiments.
Efficient Touch Based Localization through Submodularity
Apr 23, 2013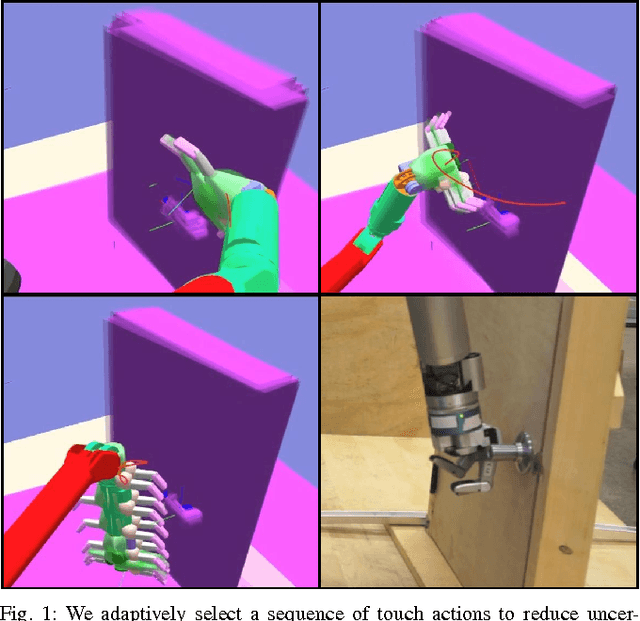
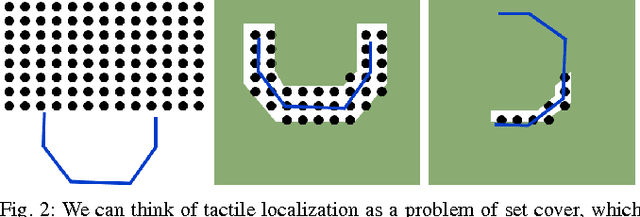
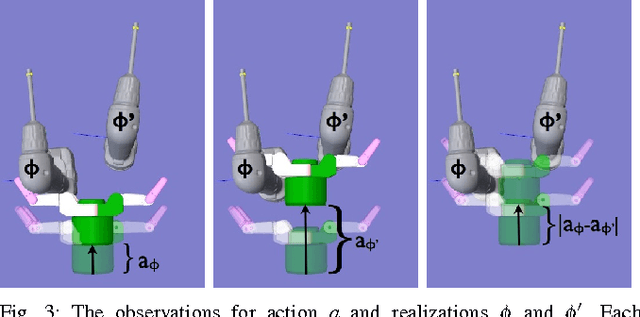
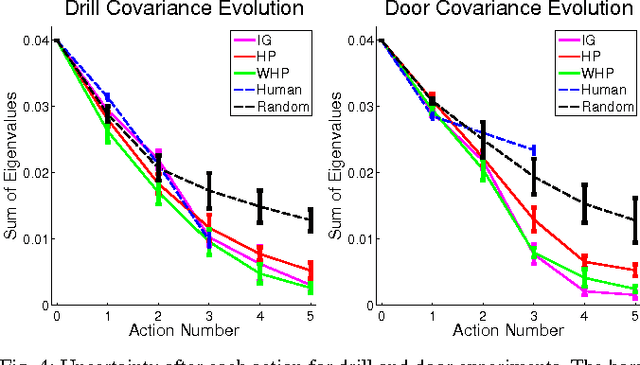
Many robotic systems deal with uncertainty by performing a sequence of information gathering actions. In this work, we focus on the problem of efficiently constructing such a sequence by drawing an explicit connection to submodularity. Ideally, we would like a method that finds the optimal sequence, taking the minimum amount of time while providing sufficient information. Finding this sequence, however, is generally intractable. As a result, many well-established methods select actions greedily. Surprisingly, this often performs well. Our work first explains this high performance -- we note a commonly used metric, reduction of Shannon entropy, is submodular under certain assumptions, rendering the greedy solution comparable to the optimal plan in the offline setting. However, reacting online to observations can increase performance. Recently developed notions of adaptive submodularity provide guarantees for a greedy algorithm in this online setting. In this work, we develop new methods based on adaptive submodularity for selecting a sequence of information gathering actions online. In addition to providing guarantees, we can capitalize on submodularity to attain additional computational speedups. We demonstrate the effectiveness of these methods in simulation and on a robot.