 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePC-DAN: Point Cloud based Deep Affinity Network for 3D Multi-Object Tracking
Jun 03, 2021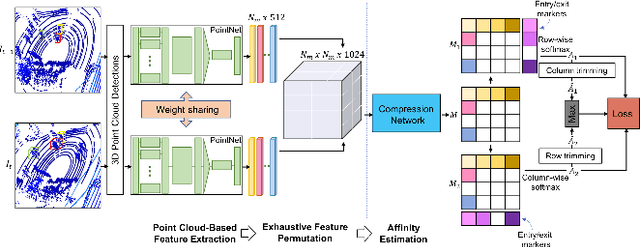
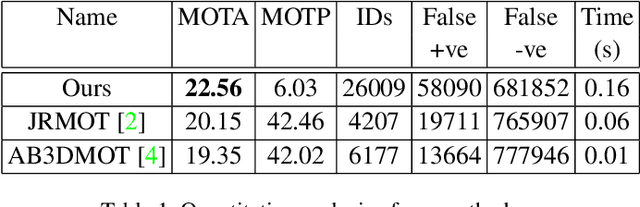
In recent times, the scope of LIDAR (Light Detection and Ranging) sensor-based technology has spread across numerous fields. It is popularly used to map terrain and navigation information into reliable 3D point cloud data, potentially revolutionizing the autonomous vehicles and assistive robotic industry. A point cloud is a dense compilation of spatial data in 3D coordinates. It plays a vital role in modeling complex real-world scenes since it preserves structural information and avoids perspective distortion, unlike image data, which is the projection of a 3D structure on a 2D plane. In order to leverage the intrinsic capabilities of the LIDAR data, we propose a PointNet-based approach for 3D Multi-Object Tracking (MOT).
PLM: Partial Label Masking for Imbalanced Multi-label Classification
May 22, 2021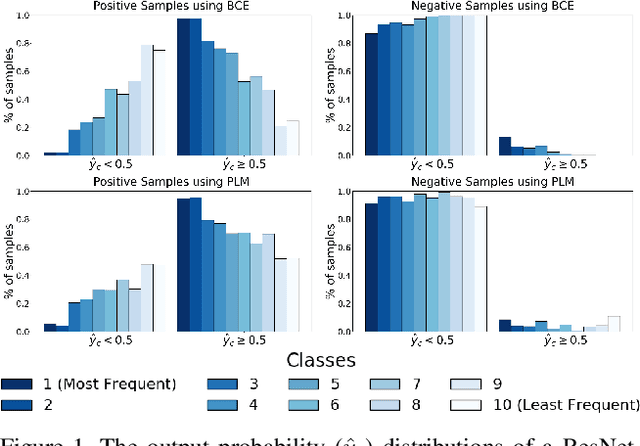
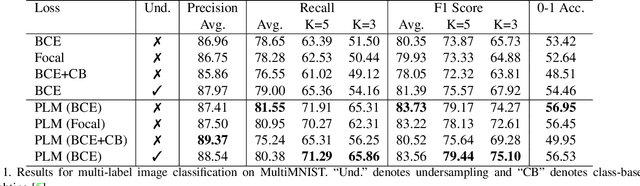
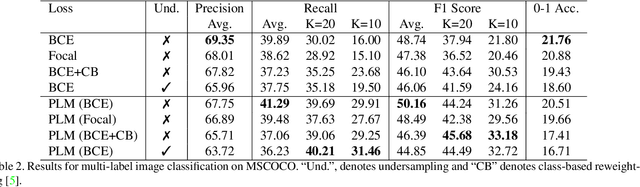
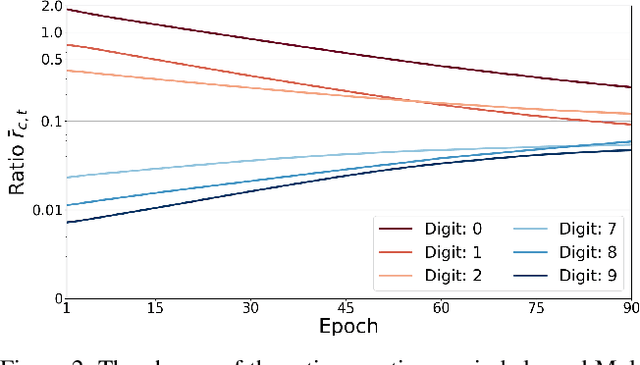
Neural networks trained on real-world datasets with long-tailed label distributions are biased towards frequent classes and perform poorly on infrequent classes. The imbalance in the ratio of positive and negative samples for each class skews network output probabilities further from ground-truth distributions. We propose a method, Partial Label Masking (PLM), which utilizes this ratio during training. By stochastically masking labels during loss computation, the method balances this ratio for each class, leading to improved recall on minority classes and improved precision on frequent classes. The ratio is estimated adaptively based on the network's performance by minimizing the KL divergence between predicted and ground-truth distributions. Whereas most existing approaches addressing data imbalance are mainly focused on single-label classification and do not generalize well to the multi-label case, this work proposes a general approach to solve the long-tail data imbalance issue for multi-label classification. PLM is versatile: it can be applied to most objective functions and it can be used alongside other strategies for class imbalance. Our method achieves strong performance when compared to existing methods on both multi-label (MultiMNIST and MSCOCO) and single-label (imbalanced CIFAR-10 and CIFAR-100) image classification datasets.
MutualNet: Adaptive ConvNet via Mutual Learning from Different Model Configurations
May 14, 2021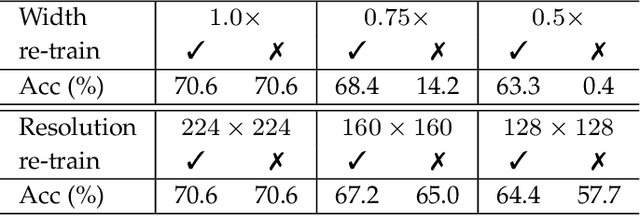
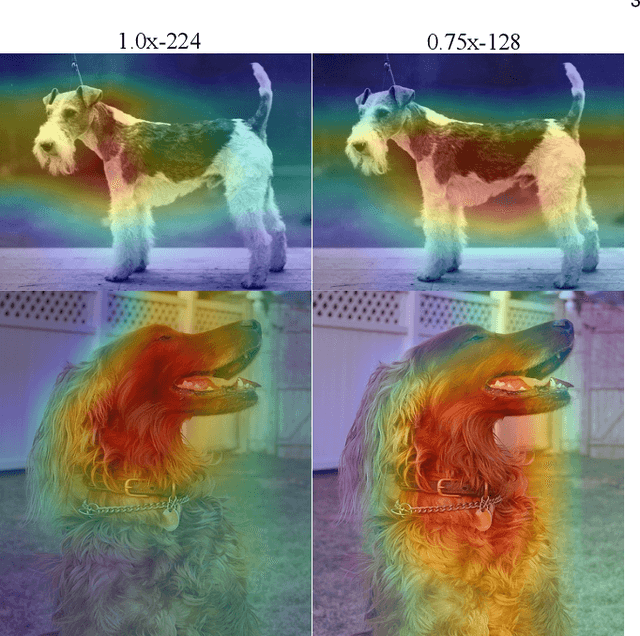

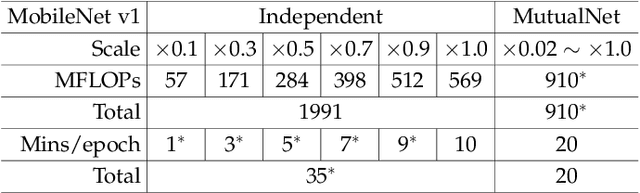
Most existing deep neural networks are static, which means they can only do inference at a fixed complexity. But the resource budget can vary substantially across different devices. Even on a single device, the affordable budget can change with different scenarios, and repeatedly training networks for each required budget would be incredibly expensive. Therefore, in this work, we propose a general method called MutualNet to train a single network that can run at a diverse set of resource constraints. Our method trains a cohort of model configurations with various network widths and input resolutions. This mutual learning scheme not only allows the model to run at different width-resolution configurations but also transfers the unique knowledge among these configurations, helping the model to learn stronger representations overall. MutualNet is a general training methodology that can be applied to various network structures (e.g., 2D networks: MobileNets, ResNet, 3D networks: SlowFast, X3D) and various tasks (e.g., image classification, object detection, segmentation, and action recognition), and is demonstrated to achieve consistent improvements on a variety of datasets. Since we only train the model once, it also greatly reduces the training cost compared to independently training several models. Surprisingly, MutualNet can also be used to significantly boost the performance of a single network, if dynamic resource constraint is not a concern. In summary, MutualNet is a unified method for both static and adaptive, 2D and 3D networks. Codes and pre-trained models are available at \url{https://github.com/taoyang1122/MutualNet}.
Found a Reason for me? Weakly-supervised Grounded Visual Question Answering using Capsules
May 11, 2021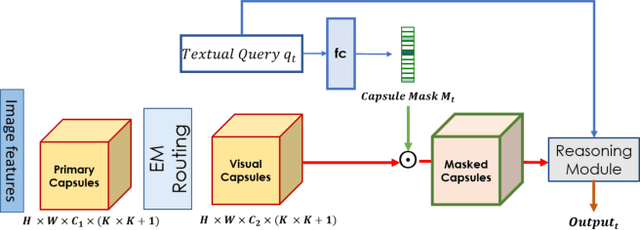
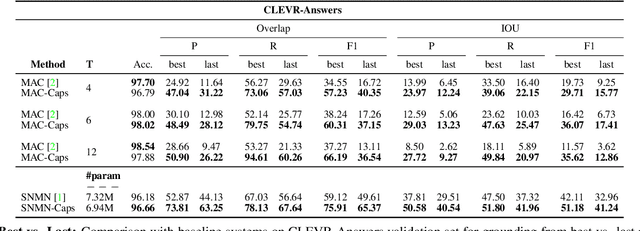
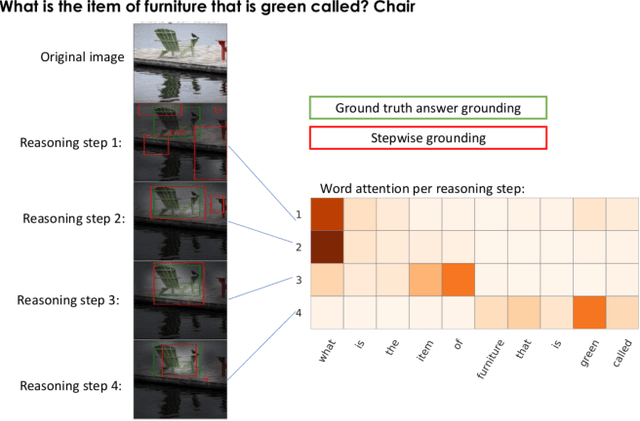
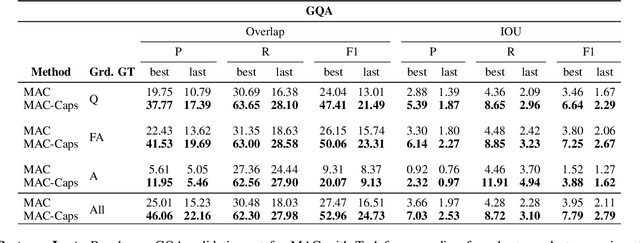
The problem of grounding VQA tasks has seen an increased attention in the research community recently, with most attempts usually focusing on solving this task by using pretrained object detectors. However, pre-trained object detectors require bounding box annotations for detecting relevant objects in the vocabulary, which may not always be feasible for real-life large-scale applications. In this paper, we focus on a more relaxed setting: the grounding of relevant visual entities in a weakly supervised manner by training on the VQA task alone. To address this problem, we propose a visual capsule module with a query-based selection mechanism of capsule features, that allows the model to focus on relevant regions based on the textual cues about visual information in the question. We show that integrating the proposed capsule module in existing VQA systems significantly improves their performance on the weakly supervised grounding task. Overall, we demonstrate the effectiveness of our approach on two state-of-the-art VQA systems, stacked NMN and MAC, on the CLEVR-Answers benchmark, our new evaluation set based on CLEVR scenes with ground truth bounding boxes for objects that are relevant for the correct answer, as well as on GQA, a real world VQA dataset with compositional questions. We show that the systems with the proposed capsule module consistently outperform the respective baseline systems in terms of answer grounding, while achieving comparable performance on VQA task.
Unsupervised Discriminative Embedding for Sub-Action Learning in Complex Activities
Apr 30, 2021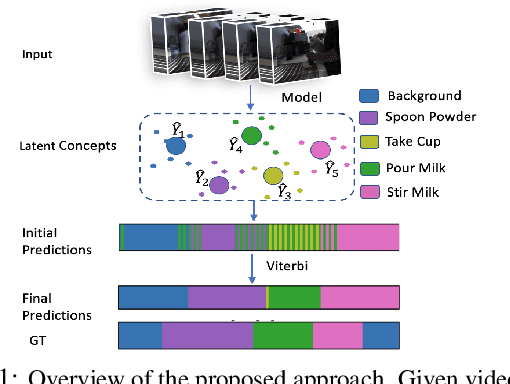
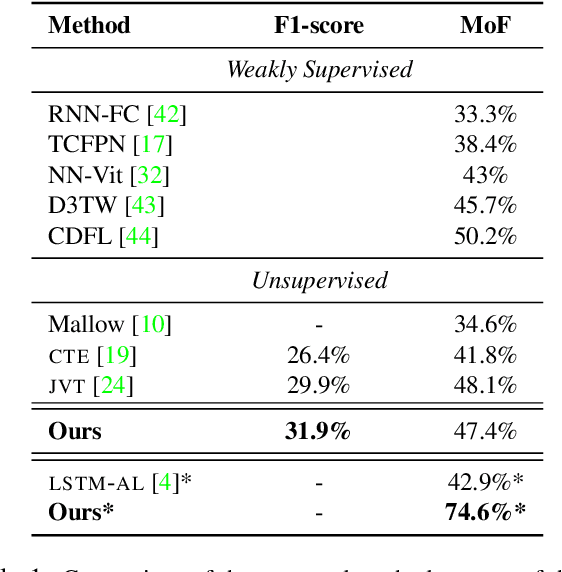
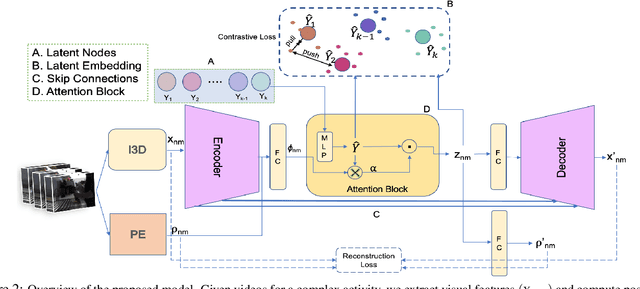
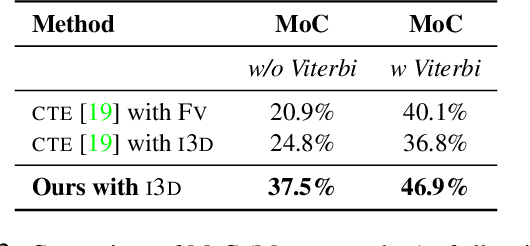
Action recognition and detection in the context of long untrimmed video sequences has seen an increased attention from the research community. However, annotation of complex activities is usually time consuming and challenging in practice. Therefore, recent works started to tackle the problem of unsupervised learning of sub-actions in complex activities. This paper proposes a novel approach for unsupervised sub-action learning in complex activities. The proposed method maps both visual and temporal representations to a latent space where the sub-actions are learnt discriminatively in an end-to-end fashion. To this end, we propose to learn sub-actions as latent concepts and a novel discriminative latent concept learning (DLCL) module aids in learning sub-actions. The proposed DLCL module lends on the idea of latent concepts to learn compact representations in the latent embedding space in an unsupervised way. The result is a set of latent vectors that can be interpreted as cluster centers in the embedding space. The latent space itself is formed by a joint visual and temporal embedding capturing the visual similarity and temporal ordering of the data. Our joint learning with discriminative latent concept module is novel which eliminates the need for explicit clustering. We validate our approach on three benchmark datasets and show that the proposed combination of visual-temporal embedding and discriminative latent concepts allow to learn robust action representations in an unsupervised setting.
Dogfight: Detecting Drones from Drones Videos
Apr 09, 2021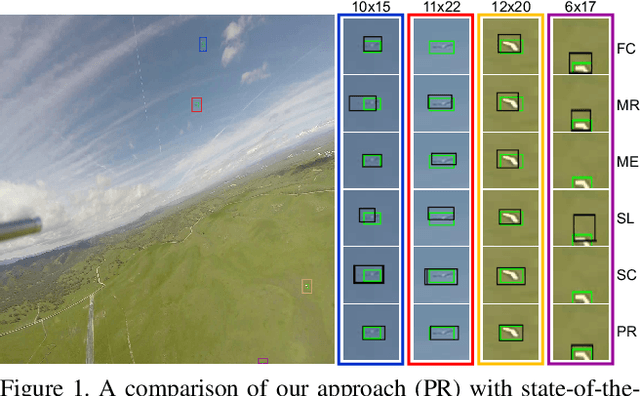
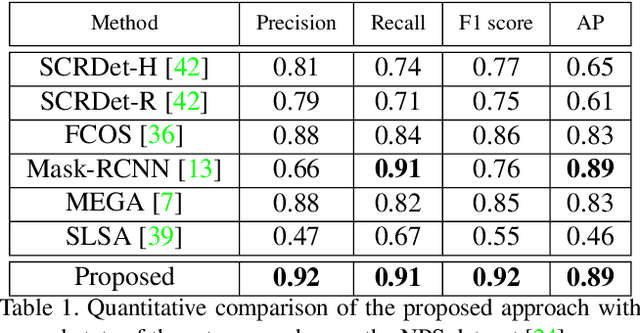
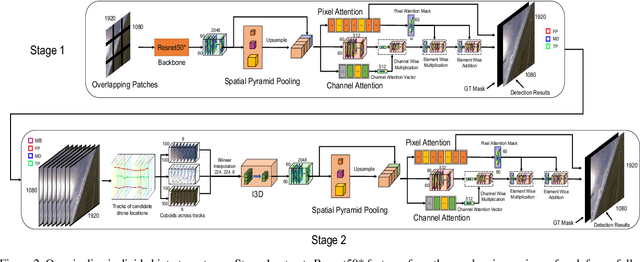
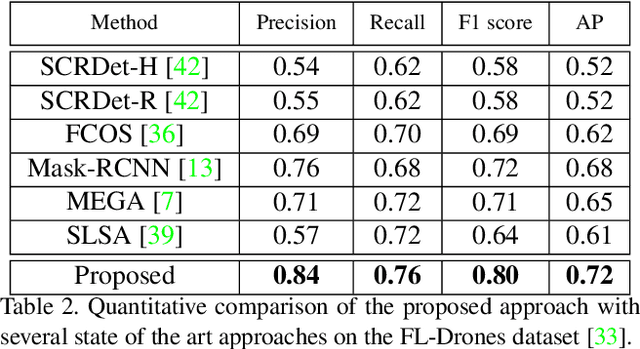
As airborne vehicles are becoming more autonomous and ubiquitous, it has become vital to develop the capability to detect the objects in their surroundings. This paper attempts to address the problem of drones detection from other flying drones. The erratic movement of the source and target drones, small size, arbitrary shape, large intensity variations, and occlusion make this problem quite challenging. In this scenario, region-proposal based methods are not able to capture sufficient discriminative foreground-background information. Also, due to the extremely small size and complex motion of the source and target drones, feature aggregation based methods are unable to perform well. To handle this, instead of using region-proposal based methods, we propose to use a two-stage segmentation-based approach employing spatio-temporal attention cues. During the first stage, given the overlapping frame regions, detailed contextual information is captured over convolution feature maps using pyramid pooling. After that pixel and channel-wise attention is enforced on the feature maps to ensure accurate drone localization. In the second stage, first stage detections are verified and new probable drone locations are explored. To discover new drone locations, motion boundaries are used. This is followed by tracking candidate drone detections for a few frames, cuboid formation, extraction of the 3D convolution feature map, and drones detection within each cuboid. The proposed approach is evaluated on two publicly available drone detection datasets and outperforms several competitive baselines.
Handwriting Transformers
Apr 08, 2021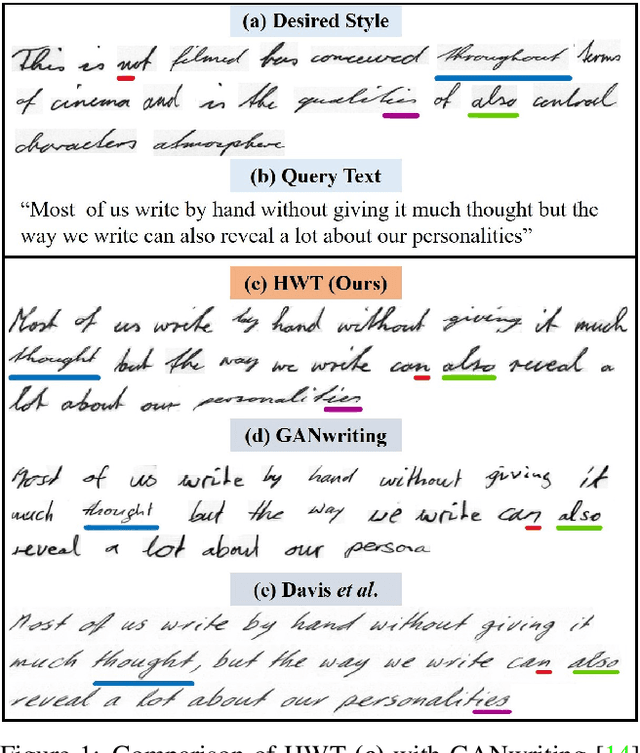
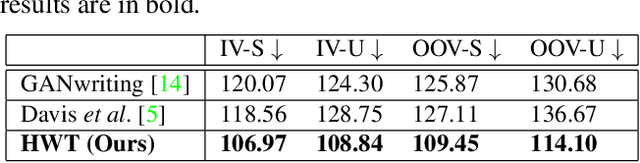
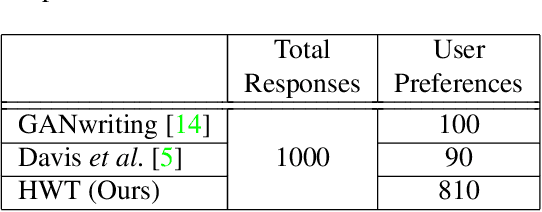
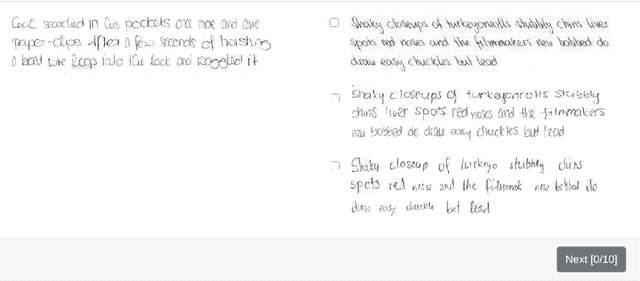
We propose a novel transformer-based styled handwritten text image generation approach, HWT, that strives to learn both style-content entanglement as well as global and local writing style patterns. The proposed HWT captures the long and short range relationships within the style examples through a self-attention mechanism, thereby encoding both global and local style patterns. Further, the proposed transformer-based HWT comprises an encoder-decoder attention that enables style-content entanglement by gathering the style representation of each query character. To the best of our knowledge, we are the first to introduce a transformer-based generative network for styled handwritten text generation. Our proposed HWT generates realistic styled handwritten text images and significantly outperforms the state-of-the-art demonstrated through extensive qualitative, quantitative and human-based evaluations. The proposed HWT can handle arbitrary length of text and any desired writing style in a few-shot setting. Further, our HWT generalizes well to the challenging scenario where both words and writing style are unseen during training, generating realistic styled handwritten text images.
LSDAT: Low-Rank and Sparse Decomposition for Decision-based Adversarial Attack
Mar 22, 2021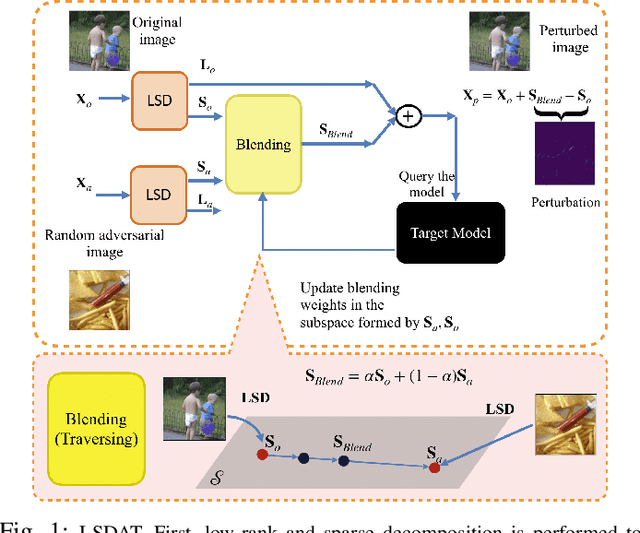
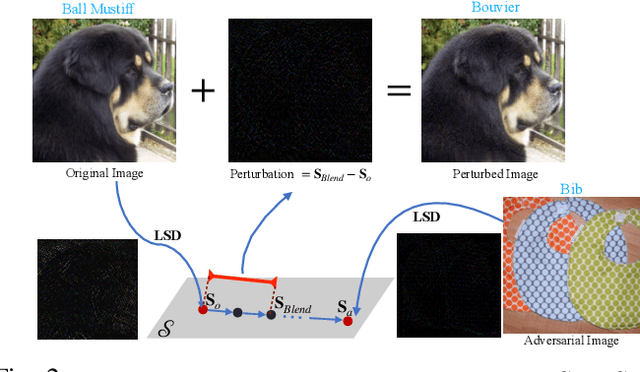
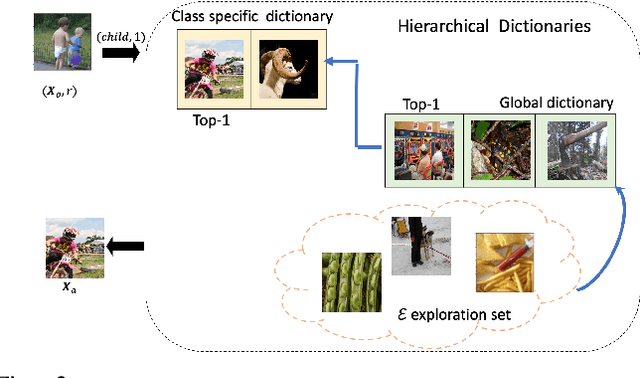
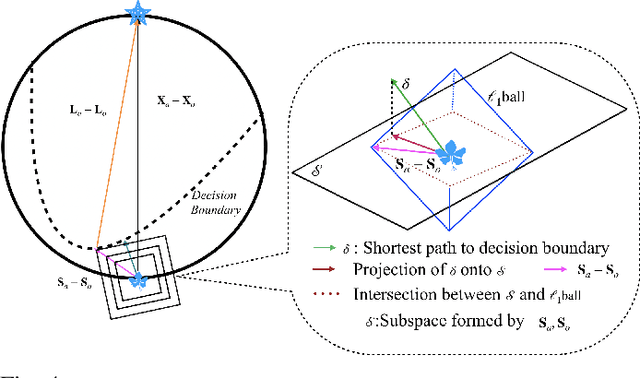
We propose LSDAT, an image-agnostic decision-based black-box attack that exploits low-rank and sparse decomposition (LSD) to dramatically reduce the number of queries and achieve superior fooling rates compared to the state-of-the-art decision-based methods under given imperceptibility constraints. LSDAT crafts perturbations in the low-dimensional subspace formed by the sparse component of the input sample and that of an adversarial sample to obtain query-efficiency. The specific perturbation of interest is obtained by traversing the path between the input and adversarial sparse components. It is set forth that the proposed sparse perturbation is the most aligned sparse perturbation with the shortest path from the input sample to the decision boundary for some initial adversarial sample (the best sparse approximation of shortest path, likely to fool the model). Theoretical analyses are provided to justify the functionality of LSDAT. Unlike other dimensionality reduction based techniques aimed at improving query efficiency (e.g, ones based on FFT), LSD works directly in the image pixel domain to guarantee that non-$\ell_2$ constraints, such as sparsity, are satisfied. LSD offers better control over the number of queries and provides computational efficiency as it performs sparse decomposition of the input and adversarial images only once to generate all queries. We demonstrate $\ell_0$, $\ell_2$ and $\ell_\infty$ bounded attacks with LSDAT to evince its efficiency compared to baseline decision-based attacks in diverse low-query budget scenarios as outlined in the experiments.
Modeling Multi-Label Action Dependencies for Temporal Action Localization
Mar 05, 2021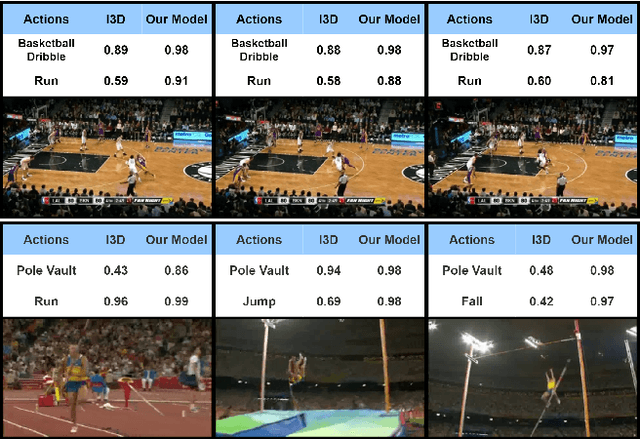
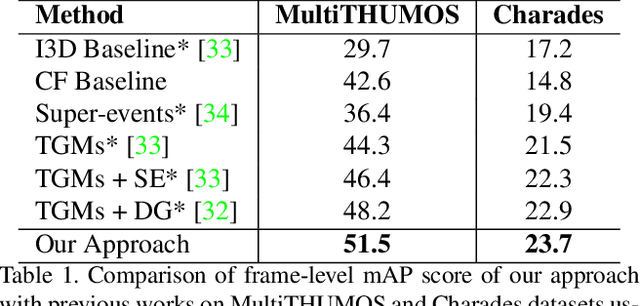
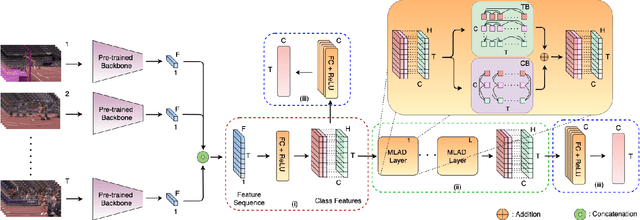
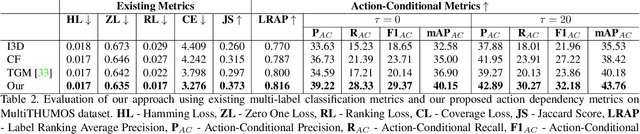
Real-world videos contain many complex actions with inherent relationships between action classes. In this work, we propose an attention-based architecture that models these action relationships for the task of temporal action localization in untrimmed videos. As opposed to previous works that leverage video-level co-occurrence of actions, we distinguish the relationships between actions that occur at the same time-step and actions that occur at different time-steps (i.e. those which precede or follow each other). We define these distinct relationships as action dependencies. We propose to improve action localization performance by modeling these action dependencies in a novel attention-based Multi-Label Action Dependency (MLAD)layer. The MLAD layer consists of two branches: a Co-occurrence Dependency Branch and a Temporal Dependency Branch to model co-occurrence action dependencies and temporal action dependencies, respectively. We observe that existing metrics used for multi-label classification do not explicitly measure how well action dependencies are modeled, therefore, we propose novel metrics that consider both co-occurrence and temporal dependencies between action classes. Through empirical evaluation and extensive analysis, we show improved performance over state-of-the-art methods on multi-label action localization benchmarks(MultiTHUMOS and Charades) in terms of f-mAP and our proposed metric.
Exploring Complementary Strengths of Invariant and Equivariant Representations for Few-Shot Learning
Mar 01, 2021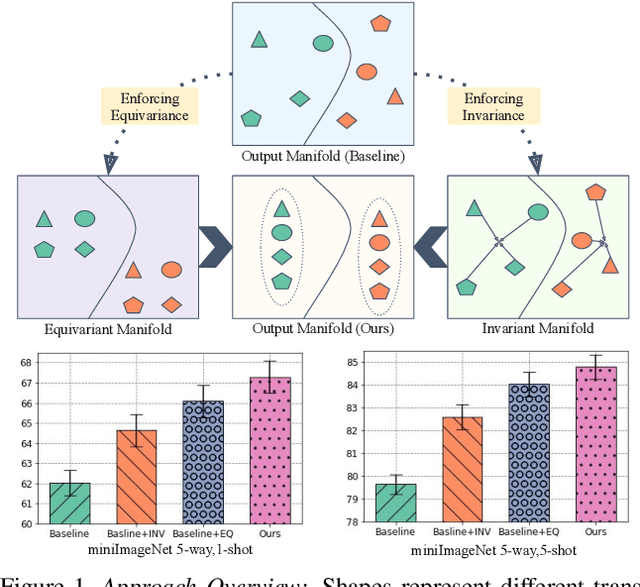
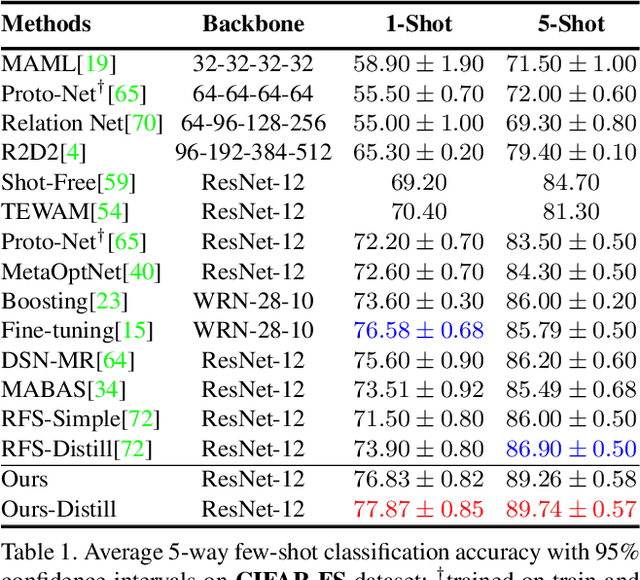
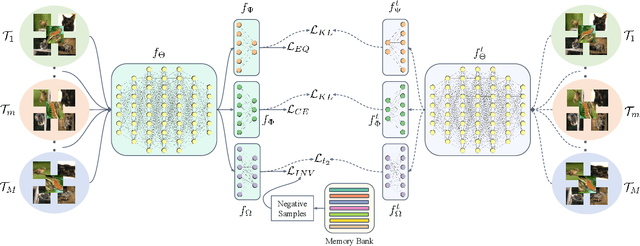
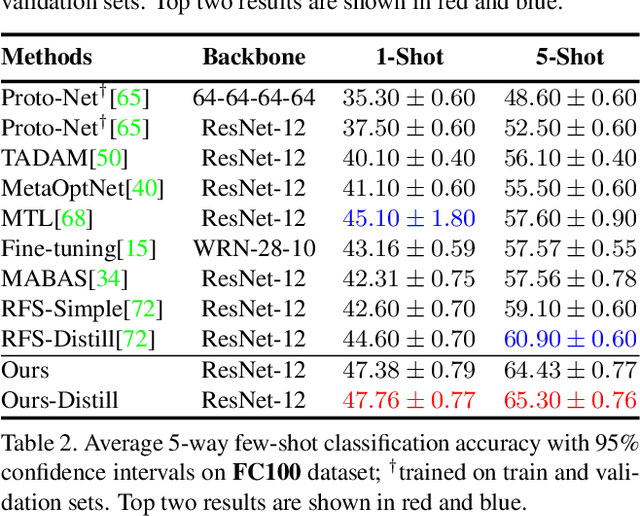
In many real-world problems, collecting a large number of labeled samples is infeasible. Few-shot learning (FSL) is the dominant approach to address this issue, where the objective is to quickly adapt to novel categories in presence of a limited number of samples. FSL tasks have been predominantly solved by leveraging the ideas from gradient-based meta-learning and metric learning approaches. However, recent works have demonstrated the significance of powerful feature representations with a simple embedding network that can outperform existing sophisticated FSL algorithms. In this work, we build on this insight and propose a novel training mechanism that simultaneously enforces equivariance and invariance to a general set of geometric transformations. Equivariance or invariance has been employed standalone in the previous works; however, to the best of our knowledge, they have not been used jointly. Simultaneous optimization for both of these contrasting objectives allows the model to jointly learn features that are not only independent of the input transformation but also the features that encode the structure of geometric transformations. These complementary sets of features help generalize well to novel classes with only a few data samples. We achieve additional improvements by incorporating a novel self-supervised distillation objective. Our extensive experimentation shows that even without knowledge distillation our proposed method can outperform current state-of-the-art FSL methods on five popular benchmark datasets.