 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePINSAT: Parallelized Interleaving of Graph Search and Trajectory Optimization for Kinodynamic Motion Planning
Jan 17, 2024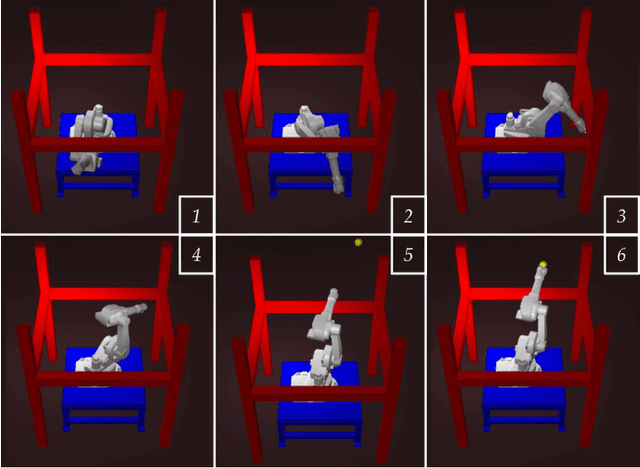

Trajectory optimization is a widely used technique in robot motion planning for letting the dynamics and constraints on the system shape and synthesize complex behaviors. Several previous works have shown its benefits in high-dimensional continuous state spaces and under differential constraints. However, long time horizons and planning around obstacles in non-convex spaces pose challenges in guaranteeing convergence or finding optimal solutions. As a result, discrete graph search planners and sampling-based planers are preferred when facing obstacle-cluttered environments. A recently developed algorithm called INSAT effectively combines graph search in the low-dimensional subspace and trajectory optimization in the full-dimensional space for global kinodynamic planning over long horizons. Although INSAT successfully reasoned about and solved complex planning problems, the numerous expensive calls to an optimizer resulted in large planning times, thereby limiting its practical use. Inspired by the recent work on edge-based parallel graph search, we present PINSAT, which introduces systematic parallelization in INSAT to achieve lower planning times and higher success rates, while maintaining significantly lower costs over relevant baselines. We demonstrate PINSAT by evaluating it on 6 DoF kinodynamic manipulation planning with obstacles.
Preprocessing-based Kinodynamic Motion Planning Framework for Intercepting Projectiles using a Robot Manipulator
Jan 16, 2024



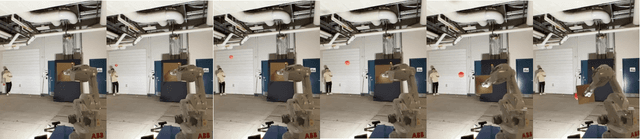
We are interested in studying sports with robots and starting with the problem of intercepting a projectile moving toward a robot manipulator equipped with a shield. To successfully perform this task, the robot needs to (i) detect the incoming projectile, (ii) predict the projectile's future motion, (iii) plan a minimum-time rapid trajectory that can evade obstacles and intercept the projectile, and (iv) execute the planned trajectory. These four steps must be performed under the manipulator's dynamic limits and extreme time constraints (<350ms in our setting) to successfully intercept the projectile. In addition, we want these trajectories to be smooth to reduce the robot's joint torques and the impulse on the platform on which it is mounted. To this end, we propose a kinodynamic motion planning framework that preprocesses smooth trajectories offline to allow real-time collision-free executions online. We present an end-to-end pipeline along with our planning framework, including perception, prediction, and execution modules. We evaluate our framework experimentally in simulation and show that it has a higher blocking success rate than the baselines. Further, we deploy our pipeline on a robotic system comprising an industrial arm (ABB IRB-1600) and an onboard stereo camera (ZED 2i), which achieves a 78% success rate in projectile interceptions.
Constant-time Motion Planning with Anytime Refinement for Manipulation
Nov 01, 2023Robotic manipulators are essential for future autonomous systems, yet limited trust in their autonomy has confined them to rigid, task-specific systems. The intricate configuration space of manipulators, coupled with the challenges of obstacle avoidance and constraint satisfaction, often makes motion planning the bottleneck for achieving reliable and adaptable autonomy. Recently, a class of constant-time motion planners (CTMP) was introduced. These planners employ a preprocessing phase to compute data structures that enable online planning provably guarantee the ability to generate motion plans, potentially sub-optimal, within a user defined time bound. This framework has been demonstrated to be effective in a number of time-critical tasks. However, robotic systems often have more time allotted for planning than the online portion of CTMP requires, time that can be used to improve the solution. To this end, we propose an anytime refinement approach that works in combination with CTMP algorithms. Our proposed framework, as it operates as a constant time algorithm, rapidly generates an initial solution within a user-defined time threshold. Furthermore, functioning as an anytime algorithm, it iteratively refines the solution's quality within the allocated time budget. This enables our approach to strike a balance between guaranteed fast plan generation and the pursuit of optimization over time. We support our approach by elucidating its analytical properties, showing the convergence of the anytime component towards optimal solutions. Additionally, we provide empirical validation through simulation and real-world demonstrations on a 6 degree-of-freedom robot manipulator, applied to an assembly domain.
A-ePA*SE: Anytime Edge-Based Parallel A* for Slow Evaluations
May 08, 2023


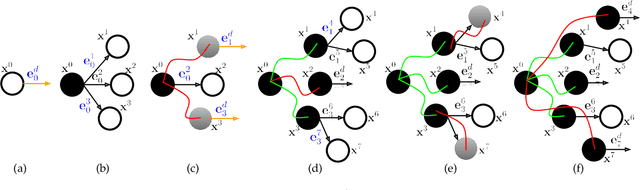
Anytime search algorithms are useful for planning problems where a solution is desired under a limited time budget. Anytime algorithms first aim to provide a feasible solution quickly and then attempt to improve it until the time budget expires. On the other hand, parallel search algorithms utilize the multithreading capability of modern processors to speed up the search. One such algorithm, ePA*SE (Edge-Based Parallel A* for Slow Evaluations), parallelizes edge evaluations to achieve faster planning and is especially useful in domains with expensive-to-compute edges. In this work, we propose an extension that brings the anytime property to ePA*SE, resulting in A-ePA*SE. We evaluate A-ePA*SE experimentally and show that it is significantly more efficient than other anytime search methods. The open-source code for A-ePA*SE, along with the baselines, is available here: https://github.com/shohinm/parallel_search
Planning for Complex Non-prehensile Manipulation Among Movable Objects by Interleaving Multi-Agent Pathfinding and Physics-Based Simulation
Mar 23, 2023



Real-world manipulation problems in heavy clutter require robots to reason about potential contacts with objects in the environment. We focus on pick-and-place style tasks to retrieve a target object from a shelf where some `movable' objects must be rearranged in order to solve the task. In particular, our motivation is to allow the robot to reason over and consider non-prehensile rearrangement actions that lead to complex robot-object and object-object interactions where multiple objects might be moved by the robot simultaneously, and objects might tilt, lean on each other, or topple. To support this, we query a physics-based simulator to forward simulate these interaction dynamics which makes action evaluation during planning computationally very expensive. To make the planner tractable, we establish a connection between the domain of Manipulation Among Movable Objects and Multi-Agent Pathfinding that lets us decompose the problem into two phases our M4M algorithm iterates over. First we solve a multi-agent planning problem that reasons about the configurations of movable objects but does not forward simulate a physics model. Next, an arm motion planning problem is solved that uses a physics-based simulator but does not search over possible configurations of movable objects. We run simulated and real-world experiments with the PR2 robot and compare against relevant baseline algorithms. Our results highlight that M4M generates complex 3D interactions, and solves at least twice as many problems as the baselines with competitive performance.
Planning for Manipulation among Movable Objects: Deciding Which Objects Go Where, in What Order, and How
Mar 23, 2023We are interested in pick-and-place style robot manipulation tasks in cluttered and confined 3D workspaces among movable objects that may be rearranged by the robot and may slide, tilt, lean or topple. A recently proposed algorithm, M4M, determines which objects need to be moved and where by solving a Multi-Agent Pathfinding MAPF abstraction of this problem. It then utilises a nonprehensile push planner to compute actions for how the robot might realise these rearrangements and a rigid body physics simulator to check whether the actions satisfy physics constraints encoded in the problem. However, M4M greedily commits to valid pushes found during planning, and does not reason about orderings over pushes if multiple objects need to be rearranged. Furthermore, M4M does not reason about other possible MAPF solutions that lead to different rearrangements and pushes. In this paper, we extend M4M and present Enhanced-M4M (E-M4M) -- a systematic graph search-based solver that searches over orderings of pushes for movable objects that need to be rearranged and different possible rearrangements of the scene. We introduce several algorithmic optimisations to circumvent the increased computational complexity, discuss the space of problems solvable by E-M4M and show that experimentally, both on the real robot and in simulation, it significantly outperforms the original M4M algorithm, as well as other state-of-the-art alternatives when dealing with complex scenes.
Learning Local Heuristics for Search-Based Navigation Planning
Mar 16, 2023Graph search planning algorithms for navigation typically rely heavily on heuristics to efficiently plan paths. As a result, while such approaches require no training phase and can directly plan long horizon paths, they often require careful hand designing of informative heuristic functions. Recent works have started bypassing hand designed heuristics by using machine learning to learn heuristic functions that guide the search algorithm. While these methods can learn complex heuristic functions from raw input, they i) require a significant training phase and ii) do not generalize well to new maps and longer horizon paths. Our contribution is showing that instead of learning a global heuristic estimate, we can define and learn local heuristics which results in a significantly smaller learning problem and improves generalization. We show that using such local heuristics can reduce node expansions by 2-20x while maintaining bounded suboptimality, are easy to train, and generalize to new maps & long horizon plans.
GePA*SE: Generalized Edge-Based Parallel A* for Slow Evaluations
Jan 24, 2023Parallel search algorithms have been shown to improve planning speed by harnessing the multithreading capability of modern processors. One such algorithm PA*SE achieves this by parallelizing state expansions, whereas another algorithm ePA*SE achieves this by effectively parallelizing edge evaluations. ePA*SE targets domains in which the action space comprises actions with expensive but similar evaluation times. However, in a number of robotics domains, the action space is heterogenous in the computational effort required to evaluate the cost of an action and its outcome. Motivated by this, we introduce GePA*SE: Generalized Edge-based Parallel A* for Slow Evaluations, which generalizes the key ideas of PA*SE and ePA*SE i.e. parallelization of state expansions and edge evaluations respectively. This extends its applicability to domains that have actions requiring varying computational effort to evaluate them. In particular, we focus on manipulation planning for a high-DoF robot arm which has an action space comprising both cheap and expensive to compute motion primitives. The open-source code for GePA*SE along with the baselines is available here: https://github.com/shohinm/parallel_search
Torque-Limited Manipulation Planning through Contact by Interleaving Graph Search and Trajectory Optimization
Oct 16, 2022
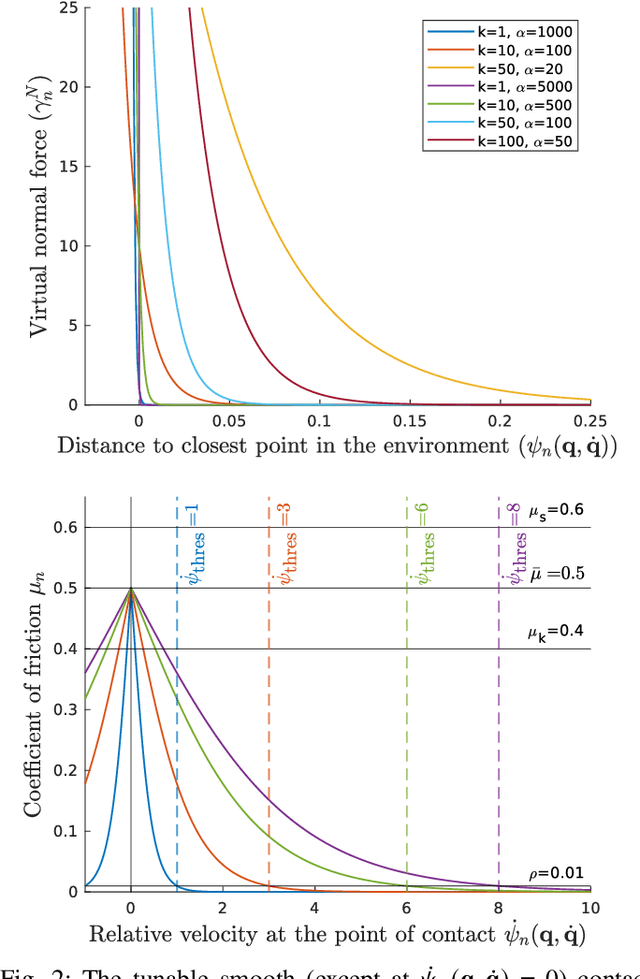
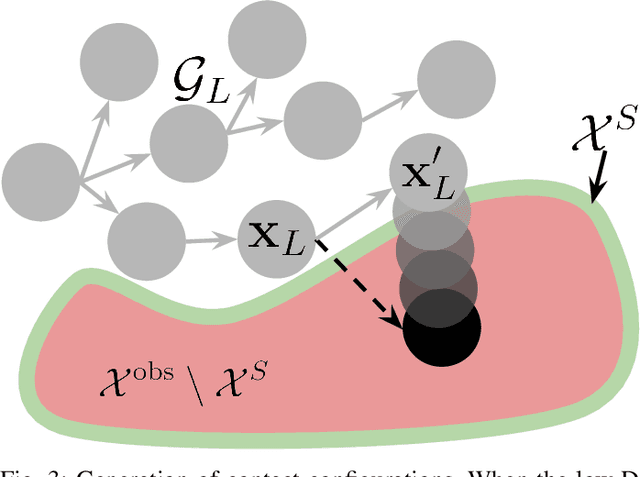
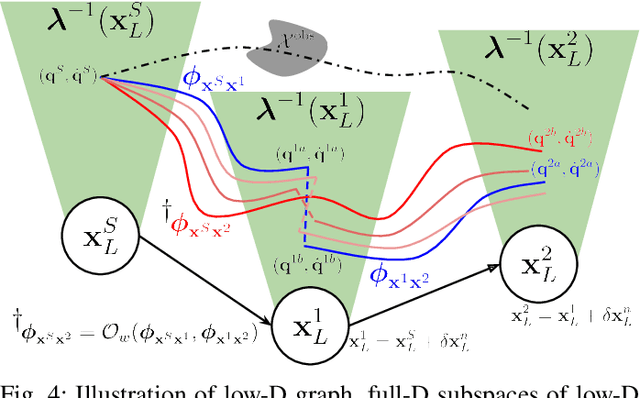
Robots often have to perform manipulation tasks in close proximity to people. As such, it is desirable to use a robot arm that has limited joint torques so as to not injure the nearby person. Unfortunately, these limited torques then limit the payload capability of the arm. By using contact with the environment, robots can expand their reachable workspace that, otherwise, would be inaccessible due to exceeding actuator torque limits. We adapt our recently developed INSAT algorithm \cite{insat} to tackle the problem of torque-limited whole arm manipulation planning through contact. INSAT requires no prior over contact mode sequence and no initial template or seed for trajectory optimization. INSAT achieves this by interleaving graph search to explore the manipulator joint configuration space with incremental trajectory optimizations seeded by neighborhood solutions to find a dynamically feasible trajectory through contact. We demonstrate our results on a variety of manipulators and scenarios in simulation. We also experimentally show our planner exploiting robot-environment contact for the pick and place of a payload using a Kinova Gen3 robot. In comparison to the same trajectory running in free space, we experimentally show that the utilization of bracing contacts reduces the overall torque required to execute the trajectory.
Efficiently Learning Recoveries from Failures Under Partial Observability
Sep 27, 2022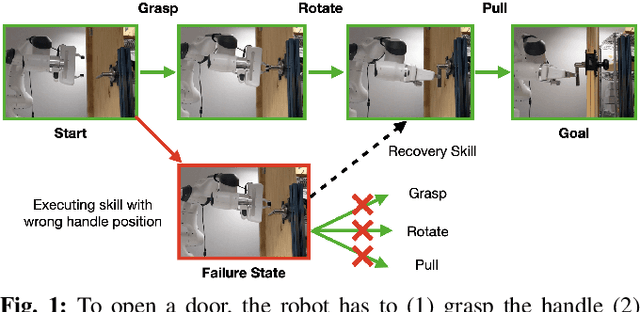
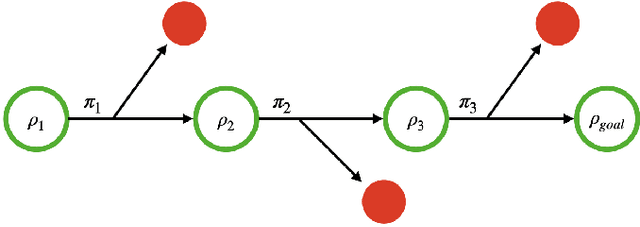
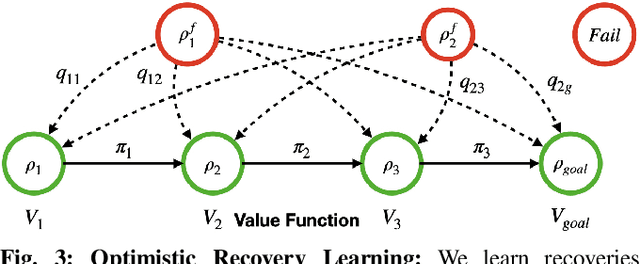

Operating under real world conditions is challenging due to the possibility of a wide range of failures induced by partial observability. In relatively benign settings, such failures can be overcome by retrying or executing one of a small number of hand-engineered recovery strategies. By contrast, contact-rich sequential manipulation tasks, like opening doors and assembling furniture, are not amenable to exhaustive hand-engineering. To address this issue, we present a general approach for robustifying manipulation strategies in a sample-efficient manner. Our approach incrementally improves robustness by first discovering the failure modes of the current strategy via exploration in simulation and then learning additional recovery skills to handle these failures. To ensure efficient learning, we propose an online algorithm Value Upper Confidence Limit (Value-UCL) that selects what failure modes to prioritize and which state to recover to such that the expected performance improves maximally in every training episode. We use our approach to learn recovery skills for door-opening and evaluate them both in simulation and on a real robot with little fine-tuning. Compared to open-loop execution, our experiments show that even a limited amount of recovery learning improves task success substantially from 71\% to 92.4\% in simulation and from 75\% to 90\% on a real robot.